异步电机参数辨识系统研究
2018-12-21 10:44,
石家庄铁道大学学报(自然科学版) 2018年4期
,
(石家庄铁道大学 机械工程学院,河北 石家庄 050043)
0 引言
在基于转子磁场定向的异步电机矢量控制中,由于其转子磁链角计算和电流解耦对电机参数有较高的要求。电机的高性能控制在很大程度上依赖于异步电机本身参数,而异步电机铭牌上不会给出相应的电机参数。因此,对异步电机参数的辨识是一个不容忽视的重点。电机参数辨识方法主要有两种,即离线辨识法和在线辨识法。在线辨识方法可以实时跟随电机不同工况进行校正,能更好地实现电机的自适应控制,但其模型复杂,计算量大,方法应用难度大,对控制单元的运算能力要求很高,目前多数在线参数辨识方法还在理论研究中[1-4]。传统的离线辨识方法需要独立地进行直流、堵转、空载3项实验[5-6],需要对设备反复拆卸,加装不同种类控制器,操作繁琐,并且在实际工况下,这种情况往往不被允许。
现利用逆变器本身的性能,结合DSP芯片实现SVPWM控制[7],将3个实验综合设计为一个系统,使异步电机参数辨识更加方便、快捷。同时运用最小二乘法、离散傅里叶变换[8],使得辨识过程更加简单,辨识结果更加精确。
1 电机辨识原理

图1 异步电机稳态时单相T型等效电路

电机试验中利用SVPWM技术产生电压矢量,辅助参数辨识实验的进行。异步电机驱动电路[9-10]如图2所示,主要由6个功率开关管元件组成,利用其8种工作状态来合成电压矢量。
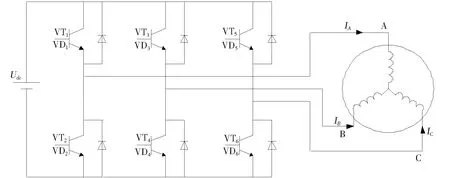
图2 异步电机驱动主电路
1.1 定子电阻参数辨识
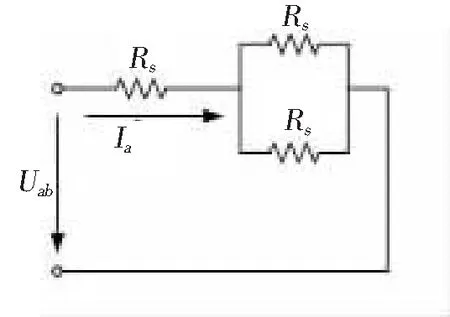
图3 直流实验等效电路
采用直流实验进行定子辨识,通过控制逆变器对电机施加低压直流电,根据欧姆定律计算出电阻值。利用SVPWM技术对母线电压Udc进行斩波,产生高频电压脉冲,近似直流电。对于异步电机而言,此时B相定子电阻与C相定子电阻并联后,与A相定子电阻串联,此时等效电路图如图3所示。因此母线电压即为相电压Uab,A相线电流即为Ia。
电机的定子电阻为
Rs=Uab/(1.5Ia)
(1)
在矢量控制的坐标变换中,根据α-β坐标系下的电压、电流与三相电压、电流的关系,得到SVPWM的输入给定为
(2)
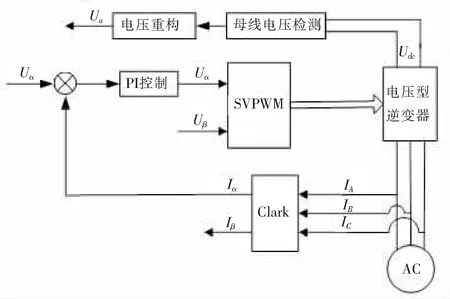
图4 直流实验控制结构图
为保证电流的稳定,防止电压过大,实验采用电流的PI控制,其控制结构如图4所示,给定α轴恒定的电流值,通过反馈定子电流,进行PI控制。并采用了电压重构技术,检测母线电压和计算PWM占空比,计算出电机相电压Uab,利用霍尔传感器测得其线电流Ia。
在直流实验中,电压与电流之间存在y=ax+b的线性关系,其中,y为相电压Uab,x为线电流Ia,a为电阻Rs,b为此线性相关参数[8]。由于测量精度的问题,电压和电流在测量过程中容易产生误差,导致计算出的电阻结果不准确。在实验中采用同一条件下多次测量的方法,来减小测量过程中误差带来的影响。测出n组数据xi,yi(i=1,2,…,n)值,根据最小二乘法的原理,未知参数a、b的求取应该满足式(3)取最小值。
(3)
使式(3)取极小值条件为
(4)
整理式(4)得
(5)
解方程得
(6)
其中
(7)
把所测得的数据代入式(5)就可以求出a,b的值。采用简单的最小二乘法处理数据,其公式简单、运算量小,同时也能够保证结果的精确性。实验证明采用最小二乘法处理数据对解决工程问题而言,是一种非常简单、实用、有效的方法。
1.2 转子电阻、电感参数辨识

图5 堵转实验等效电路
采用堵转实验进行转子电阻、漏感的辨识。其原理是给电机绕组接入单相正弦交流电,此时电机处于堵转状态,不会产生转矩。当电压频率较高时,由于励磁电感很大,图1中流过励磁回路的电流可以忽略不计,转差率s=1。此时三相电机内部电路可以等效为B相、C相电阻并联,后与A相电阻串联;B相、C相漏感并联,后与A相漏感串联。其等效电路图如图5所示。
等效阻抗为
Z=Uab/Ia
(8)
等效电阻为
R=(Uab/Ia)cosθ
(9)
等效电抗为
X=(Uab/Ia)sinθ
(10)
定子、转子漏感为
σLs=σLr=X/(3ω)
(11)
式中,ω为电压基波角频率。
转子电阻为
Rr=(2/3)R-Rs
(12)
在SVPWM 控制算法中,控制Uα输入单相正弦电压,且Uβ=0,保证B、C两相桥臂控制信号相同。当电流稳定后,得到异步电机A相电流以及线电压Uab,进行离散傅里叶变换,可以得到相应的基波有效值和功率因数角。
由于电压和电流都是正弦波且它们之间存在相位差,其相位差即为功率因数角,可以利用电流为零时取电压值的方法,获得其电压值再除以其幅值再进行反正弦操作,就能够得到功率因数角,进而得到功率因数cosφ,大大简化了功率因数的计算过程[11],得到
(13)
式中,U为A相电流为零时的相电压Uab,M为相电压的幅值。
根据式(8)~式(12)就可以推算出转子电阻Rr和定子、转子漏感σLs、σLr。
1.3 励磁电感辨识
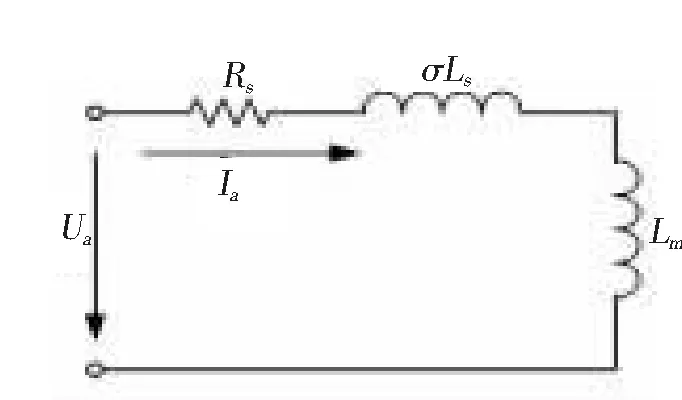
图6 空载实验等效电路
采用空载实验进行励磁电感辨识,其原理是电机空载运行时转速接近同步转速,转差率s接近于零,电机转子回路可以近似为开路,等效电路如图6所示。
图中等效阻抗为
Z=Ua/Ia
(14)
等效电抗为
X=(Ua/Ia)sinθ
(15)
励磁电感为
Lm=X/2πf-σLs
(16)
通过电机开环V/F控制,施加额定频率的交流电压,使异步电机达到额定转速。通过霍尔传感器得到其母线电压和A相电流,利用电压重构技术即可得到Uab。采用离散傅里叶变换计算出电压、电流的基波有效值和功率因数角。再根据式(14)~式(16)即可计算出励磁电感Lm。
2 辨识结果

图7 系统流程图
采用TI公司的DSP芯片TMS320F2812作为主控器,采用专用驱动芯片IR2110和高达25 A,1 200 V的IGBT管,PWM驱动信号通过高速光耦完全隔离高压与低压侧,保证驱动板不受高压干扰。用霍尔传感器检测输出电流波形,使低压侧和高压侧完全隔离。
实验中使用的电机额定参数为:Pn=200 W;Un=36 V;In=9 A;wn=1 400 r/min;极对数P=2。SVPWM载波频率10 kHz,死区时间为3.2 μs,IGBT最大开关延迟时间Ton=0.1 μs,Toff=0.3 μs。为了实现电机参数辨识目标,基于DSP编写了电机参数辨识系统,系统流程如图7所示。
图8所示为直流实验电压电流,在直流试验中,待电流稳定后,通过DSP的ADC模块进行转换,以50 Hz的频率对电压和电流进行同步采样,得到128个点的电压和电流值,并用最小二乘法计算,获得定子电阻Rs。
在堵转试验中,通入30 Hz单相交流电,电流和电压的采样周期为260 μs,这样采集128个点即为一个完整周期。图9为堵转实验电压、电流,从图中可以看出电压超前电流,电压和电流近似正弦波。

图8 直流实验电压电流
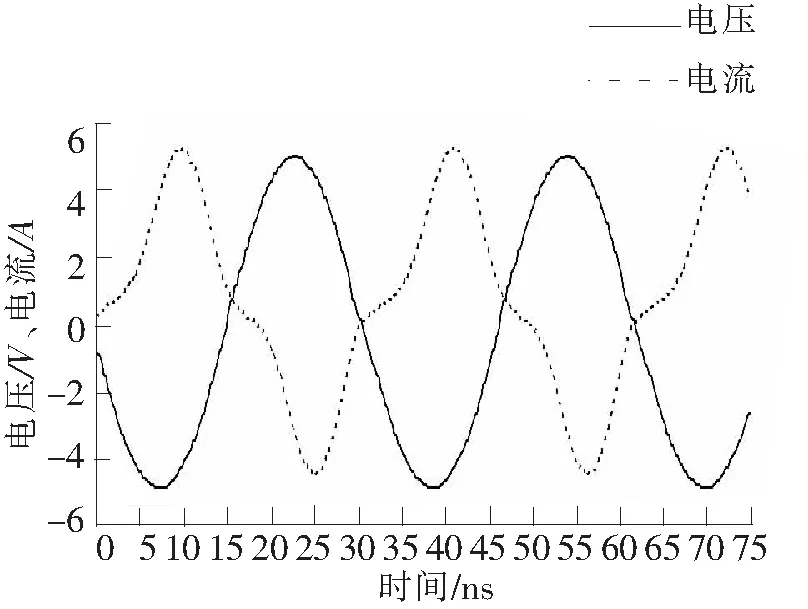
图9 堵转实验电压电流

图10 空载实验电压电流
在空载实验中,通入50 Hz三相交流电,得到电压电流波形如图10所示。电机运行稳定后进行采样,由于50 Hz三相交流电,周期为20 ms,对其电压和电流进行同步采样,采样128个点,采样周期为156 μs,保证了采样点为一个完整周期,方便进行离散傅里叶变换。
所得到的辨识结果如表1所示,通过计算得到转子时间常数为Tr=0.017 1,与之前通过矢量控制得到的Tr=0.017 4对比,误差为1.72%,具有较高的准确性。

表1 辨识结果
3 结语
电机参数的准确性对电机的矢量控制有着重要的影响。本文基于空间矢量调制技术(SVPWM),采用了PI电流控制和最小二乘法,准确地计算出定子电阻。在堵转、空载试验中采用离散傅里叶变换数据处理手段,去除了其它谐波的影响,获得了准确的电机参数。研究的异步电机辨识系统,方法简单、程序运行时间短,其参数的准确性,能够满足矢量控制的需求。
猜你喜欢
电工技术学报(2022年19期)2022-10-14
防爆电机(2022年3期)2022-06-17
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2022年2期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
汽车文摘(2017年3期)2017-12-08