基于云技术的多参数感知机器人设计研究
2018-12-20 07:55:02何伟宏赖胜南张泽滔
电子设计工程 2018年24期
何伟宏,赖胜南,张泽滔
(中山大学南方学院,广东广州510970)
随着世界各国人力成本的大幅提高,当今各行业应用机器人的需求从传统的工业制造领域到空间探索搜救、健康医疗康复、环境智能监控领域都在迅速增长[1-3]。机器人技术作为战略新兴产业、高新技术之一,是未来工业智能制造发展的方向,对于社会经济发展具有重要意义。
传统的机器人已经解决自身的定位和行进问题,对于机器人间的协同作业、机器人的人机交互、机器人通过多传感器对外部环境感知的海量信息的有效处理和传输等问题已成为研究的热点。文中基于云技术的系统架构和用户关键信息多传感器数据采集方法,对多参数感知机器人的设计进行了深入研究,利用嵌入式技术进行系统软硬件的实现,通过实际测试机器人寻迹定位导航、环境感知预警、数据云存储、无线通信控制等功能,验证本设计实现了预期功能。
1 感知机器人架构
传统机器人往往只能依靠固定编程及机械完成特定的任务,借助于人类处理过的信息,完成精确指令和任务。随着信息技术的发展,借助于互联网[4]、云计算[5]、对机器人的远端控制监控、实时信息反馈。基于云技术的机器人更加小型化,能有效降低成本,帮助机器人提高自学能力、适应能力,推动其较快的大规模普及应用[6]。基于云技术的机器人能提高其对复杂环境的适应性,必将成为机器人未来的发展趋势[7]。
感知机器人系统云架构[8]由感知层、网络层、云技术层和应用层4个部分组成,如图1所示。
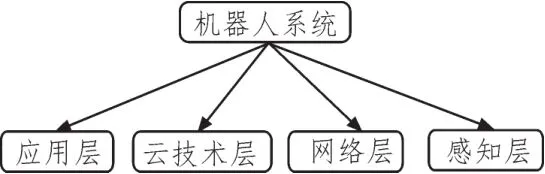
图1 机器人系统云架构示意图
1.1 应用层
应用层(Application Layer)位于本系统四层结构中的最顶层,其功能主要为交互[9]。应用层与最底端的感知层一起,是系统中的用户能直观感受的部分和核心所在。
文中应用层一般由移动终端、调度中心、管理软件等组成。通过应用层软件将获取到的信息可视化,为用户提供直观的实时数据查询、预警信息显示,提供远程控制指令信息,达到远程监控信息的实时交互。
1.2 云技术层
云技术(Cloud technology)是指在广域网或局域网内将软硬件、通信网络等资源统一起来,实现数据的计算储存、分析处理和交流共享的一种托管技术。其重要支撑是云计算[10](Cloud Computing)技术,云计算结合网络存储技术和虚拟化技术,通过互联网提供方便快捷的计算资源[11]。
云计算为本系统提供了一种转移并减少机器人运算压力,减低计算成本的模式,使本系统在软硬件开发时屏蔽掉了数据存储转发等流程,通过访问云服务器用户可以相对安全且快速获得机器人系统感知到的实时数据和历史数据[12]。
本系统中云技术层可以对感知层采集数据进行运算存储、分析处理和知识挖掘以供应用层随时随地的调用。
1.3 网络层
本系统中,网络层的主要任务是数据的传输,把感知层感知到的数据安全可靠、方便快速地进行传送,实现机器人系统与云服务器、移动端的连接。网络层(Network Layer)所涉及技术主要有蜂窝网络、无线网络和有线网络3类。
1.4 感知层
感知层是本系统的核心,是环境信息采集的关键部分。感知层也称为传感层,包括基本的感应器件如摄像头、GPS、RFID标签和读写器、二维码标签和识读器等传感器件,由感应器组成的网络如RFID网络、传感器网络等两大类别。主要涉及到射频识别技术、传感器技术、GPS技术、微机电系统、二维码技术。
2 感知机器人系统配置与模块设计
2.1 感知机器人系统硬件配置
多参数感知机器人实现机器人的自主运动、环境参数的采集、数据的处理和传送功能,硬件系统包括核心处理器、电源模块、环境感知模块、通信模块、运动控制模块等,系统架构图如图2所示。
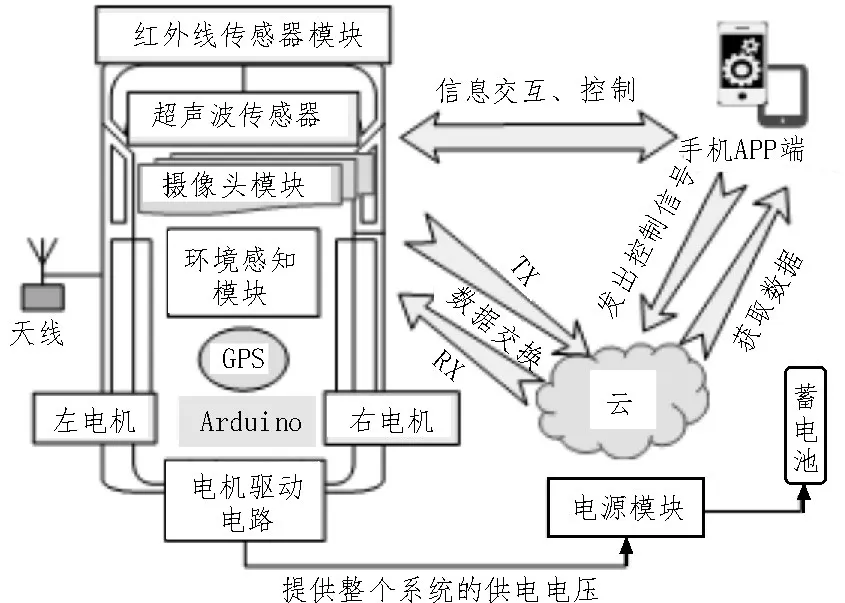
图2 感知机器人系统架构图
2.2 核心处理模块
文中核心处理器选择了Arduino Mega2560。Arduino Mega2560是采用USB接口的AVR系列处理器集成板具有16路模拟接口、54路数字接口,适用于本系统中多模块、多传感器对核心处理器外设资源丰富的要求,它也能兼容Arduino设计的扩展板,并且它的外设资源较为丰富,能满足多参数感知机器人各模块和大量传感器对接口的需求。
2.3 多电压电源模块
多电压电源模块由4节蓄电池提供系统总电源,系统主板、核心处理器电压通过AMS1117稳压芯片[13]提供5 V电压,升压部分由XL6009芯片和外围电路组成,为系统电机、移动模块提供稳定的9 V电压,降压部分由稳压芯片LP2985构成,提供部分传感器需求的3.3 V电压。本系统多电压电源模块电路如图3所示。
2.4 多传感器模块

图3 多电压电源模块电路图
在多参数的感知机器人的设计中,需要使用大量的传感器进行数据的采集,这些传感器可以分为两个类别,一类是对移动机器人本身的数据采集,被称为内部传感器,如GPS、陀螺仪、加速度传感器等;另一类是对环境参数的采集,也被称为外传感器,如红外线传感器、超声波传感器等[14],部分传感器选型如表1所示。
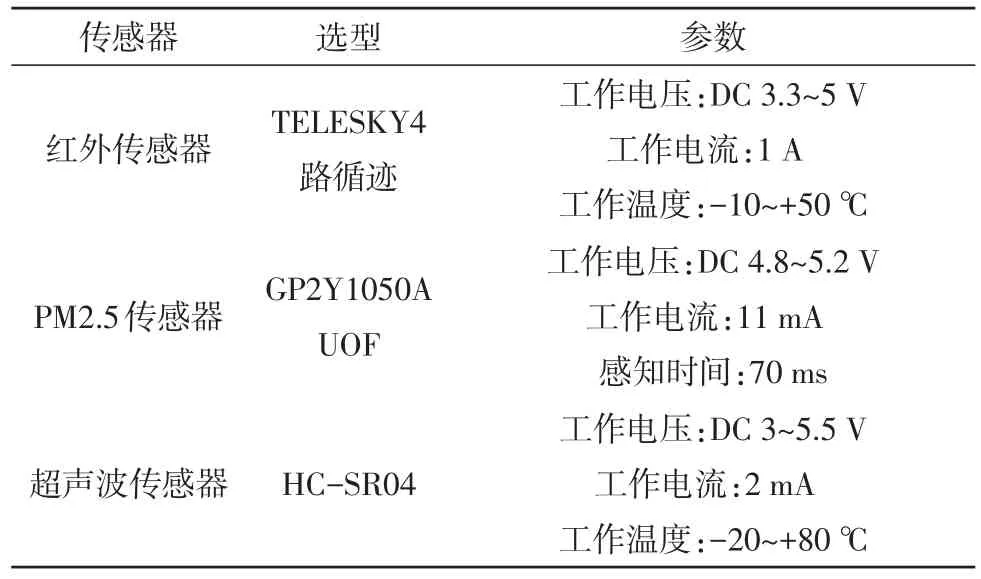
表1 传感器选型
2.5 通信模块
本系统通信模块采用的是移动网络中覆盖范围广、速度快,可靠性高的移动WiFi技术[15]。文中采用无线通信WiFi模块MW151RM对机器人与手机端进行数据采集与处理。
无线通信WiFi模块和核心处理器的通信主要利用了WiFi模块的串口(VCC、RX、TX、GND),无线通信WiFi模块的作用是将串口转化成无线WiFi信号。
2.6 运动控制模块
2.6.1 运动控制模块方案
本文的感知机器人运动的两种运动模式分别是GPS导航模式和预定轨道寻迹模式。GPS导航模式中,通过给定目的地的经纬度,要求机器人能够根据自身位置规划最佳路径,平稳的运动到目的地。预定轨道寻迹模式,要求机器人能够按照提前预设的轨迹运行,当预设运行轨迹上存在障碍物时,要求机器人提前判断预警,停止前进等待指令或另找路线继续前进。
2.6.2 电机控制方案
本系统采用差分式的履带轮式机构[16],通过核心处理器输出脉冲宽度调制(PWM)控制电机来实现机器人的驱动,通过两个电机的转速差来实现机器人的转弯。本系统采用L293DD组成双电机驱动控制电路。
3 感知机器人软件系统构建
3.1 软件系统总体设计
机器人系统软件的总体设计如图4所示,分为5个部分:主程序部分、传感器模块程序、移动控制模块程序、通信模块程序和移动端程序。
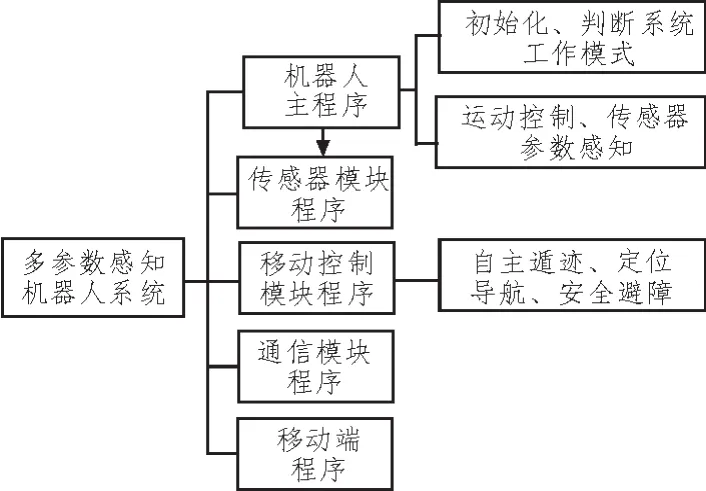
图4 机器人系统软件的总体设计
3.2 移动端程序设计
3.2.1 移动端总体架构设计
1)多参数数据处理架构设计如图5所示。
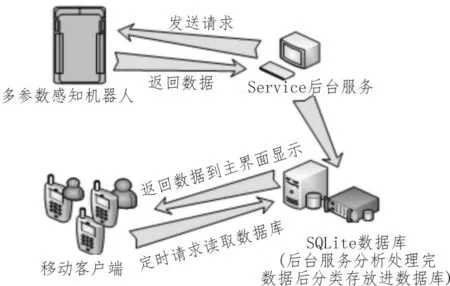
图5 移动端总体架构图
2)视频监控:多参数机器人摄像头通过WiFi数传模块传送数据,移动APP后台接收并处理图像后,视频监控图像在移动APP上显示。
3)远程智能控制:通过移动客户端发送控制指令,多参数感知机器人执行控制指令[17]。
3.2.2 具体功能设计
1)GPS定位及机器人位置显示
用户通过移动端获知机器人的实时位置,然后通过GPS模块[18]或者WIFI模块把经纬度发送到云端或者移动客户端,移动客户端通过解析经纬度把机器人实时位置显示到高德地图上。
2)环境数据图形化处理
文中移动端APP中主要通过构造坐标系的方法和在坐标系中画折线图的方法来实现数据图形化的。
3)多参数智能预警
本系统移动端针对用户关键参数设计实现了智能预警,通过移动端设置用户兴趣传感器的预警阈值,当感知机器人所传回该传感器实时数据超过阈值时,移动端发出声音震动、提示界面的预警动作。
4 感知机器人系统实机实验
4.1 功能测试
该综合实验选用履带式的移动机器人wi-robot作为多参数感知平台,机器人本体上安装了通信模块、传感器模块以及摄像头,这些模块用于机器人与云服务器和移动端的无线通信通知[19]、远程监控预警,机器人定位导航、循迹避障;现场实时图像获取,环境数据感知获取。实验模型感知机器人如图6所示。

图6 感知机器人实验模型
4.1.1 环境感知
本系统实现的环境感知参数有机器人周围空气温湿度、空气中可燃气体浓度值、空气中PM2.5值、紫外线强度值、机器人涉水水位值,空间环境生命体征探测等。
多参数感知机器人系统中的GPS模块工作实现定位,通过WIFI模块把机器人当前经纬度数据发送到云服务器或者移动客户端,移动客户端通过云服务器或机器人发送来的经纬度把位置显示到高德地图上。
4.1.2 无线控制
无线控制实现了移动端对机器人的运动控制和视频监控,通过TCP/IP协议向机器人发送控制指令,当移动端APP相应控制指令按钮触发时,即刻启动SocketThread线程链接并发送相应控制指令,机器人系统通过WiFi模块接收到指令,执行指令动作;机器人摄像头实时捕捉当前画面,通过无线通信实时传回感知画面到移动端供用户查看。
4.1.3 云架构实现
机器人系统采集到的环境参数通过WIFI模块上传到中国移动提供的开放云平台OneNET实现数据存储、计算。本系统应用OneNET云平台实现数据存储。
4.2 性能测试
4.2.1 通信距离
发射端采用MW151RM无线WiFi发射模块,接收端和分析采用在手提电脑运行WiFitester3.0通信测试软件。在空旷场地,在0 dBm发射功率下,测试本系统采用的MW151RM无线WiFi发射模块在不同通信距离下接收信号强度(Received Signal Strength Indication,RSSI)和丢包率之间的关系,实验结果如图7所示。机器人距离用户端60 m内接受信号强度[20]高于-90 dBm,丢包率小于10%,满足通信监测要求。
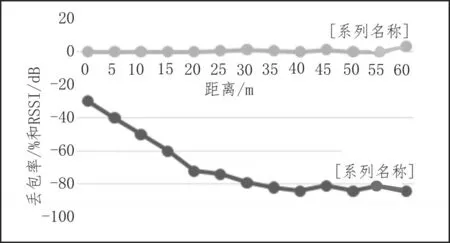
图7 信号强度及丢包率与通信距离关系图
4.2.2 系统反应时间
在空旷场地,在0 dBm发射功率下,测试本系统采用的MW151RM无线WiFi发射模块在不同通信距离下感知机器人接收到移动端控制信号的反应时间,实验结果如图8。
5 结论
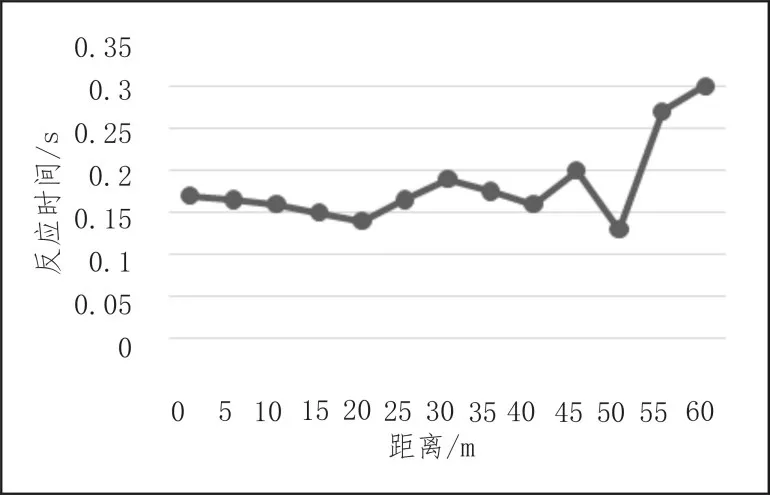
图8 在不同距离下感知机器人反应时间
文中以多参数感知机器人为研究平台,基于云技术的系统架构和用户关键信息多传感器数据采集方法,设计了针对多参数感知机器人基于云技术的系统架构,以减少机器人计算压力、网络通信负载,对多参数感知机器人的设计进行了深入研究,利用嵌入式技术进行系统软硬件的实现,通过实际测试机器人寻迹定位导航、环境感知预警、数据云存储、无线通信控制等功能,验证本设计实现了预期目标。无线通信性能测试实验数据表明,感知机器人无线通信距离60 m内具有良好的通信质量和响应速度。
然而,由于研究时间与掌握知识的局限性,本人认为本文的研究内容还有几个方面还需要解决:
1)由于本系统云架构中云服务器选择的局限性,系统实现了机器人感知数据流的存储,尚未达到数据云端计算、数据有效融合的功能。因此,云服务器功能需要进一步改进。
2)由于硬件系统采用模块化设计思想,在进行系统集成时模块之间难免存在兼容性的问题,各传感器模块还受到模块电信号的影响,如何更好的进行硬件系统集成减少模块间信号的干扰也是一个值得关注的问题。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21 09:35:30
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01 06:27:42
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
文理导航·教育研究与实践(2015年12期)2015-12-04 00:49:23
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08