
溺水快速救援系统研究
2018-12-19 03:14陈会如何永明丁子峻
山西建筑 2018年33期
陈会如 何永明 杨 柳 丁子峻
(东北林业大学交通学院,黑龙江 哈尔滨 150000)
研究表明,在我国尤其是水运居多的南方地区,因溺水导致的死亡率位居意外死亡的前列。每年全球有37万人死于溺水,被列为24岁及以下人群十大意外死亡原因之一。目前的小型船只对救生设备的投掷主要为人工投掷,这种投掷方式虽然较为简单,但投掷的范围较近,对于远距离的救援无法起到快速、高效的作用,延误了最佳救援时间。本救援系统通过操控无人机对救生设备进行携带、释放,以高效快速的方式协助完成溺水救援的过程。
1 水上救援现状分析
1.1 水上救援的特点
溺水情况主要发生在以下两种水域里,即开放水域和平静水域。范围较广、流速较大的水域皆可列入开放水域的范围,例如各江河湖海,此类水域的救援特点是待施救人员的溺水地点与安全区域的距离较远,直接入水救援的难度较大,对施救人员的要求较高,同时危险性较高;平静水域主要包括面积较小,流速小于0.4 m/s的水域,例如人工水池、游泳池和农村地区的河湾等,人工水池和游泳池的特点是环境较好,救援较方便,而农村的河湾等水域的特点是水质浑浊,水底情况复杂,救援情况难以预估,施救难度较大。
1.2 无人机救援的现状
无人机作为一种便捷又高效的图像输送机器被广泛应用于航拍中,近年来,由于其航拍图像清晰以及准确的GPS定位系统,无人机的应用范围越来越广,比如利用无人机调查交通量、喷洒农药等,在救援中,无人机同样发挥着不可替代的作用。无人机在救援中的作用越来越重要,比如高速公路救援,与路面救援相比,无人机救援的优点在于可快速获得待救援现场情况,以便做出及时、准确的应急措施。
1.3 无人机在海上救援过程中的现状
我国有三种不同种类的无人机用于海上救援,分别为以浮力为动力的海上搜救无人机,飞行在高空的高续航无人机和可携带救援物资的地面效应无人机,本文主要讨论可携带物资无人机的救援情况。
2 无人机救援的技术背景
技术是发展的主要动力,无人机技术发展得愈发成熟,就溺水救援系统而言,最重要的技术支持为准确定位技术和航拍摄影技术。
准确定位技术主要应用的是GPS全球定位系统,在GPS观测中,地面接收机将接收到卫星从高空传回的数据,利用预设的距离公式计算地面位置的准确坐标(X,X,Z)。
在溺水救援过程中,无人机利用自身的摄像技术对拟拍摄的景象进行拍摄,而后将图像发送给计算机端,计算机对该图像进行分析处理。由于溺水人员落水时经常发生挣扎行为,造成人员分辨不清晰的后果。为避免因图像不清而造成救援不及时的严重后果,本文将采用图像语义分割方法对图像进行识别。
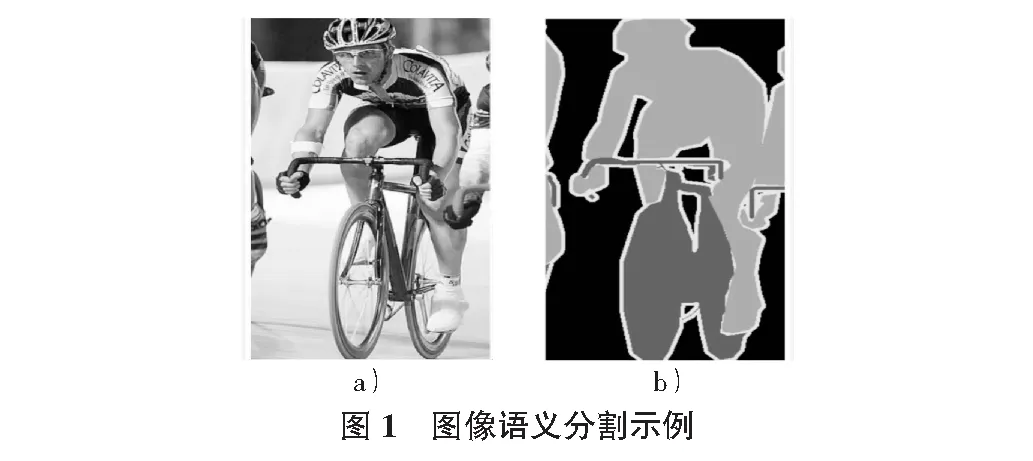
图像语义分割(semantic segmentation)的含义可以理解为利用计算机分辨出图像的语义,并从像素的角度自动分割图像中的不同对象,对原图中的每个像素都进行标注。
如图1所示,如在计算机中输入图1a),自动输出图1b)(图1b)中浅灰色代表人,深灰色代表自行车)。
本文利用控制模块的溺水者识别算法对采集到图像进行处理后判断视频中是否出现溺水者。溺水者检测采用背景帧差法进行,但传统的背景帧差法主要是直接比较前后两帧图像对应像素点的灰度值,然而这种方法在低对比度的情况下易受噪声干扰。因此本文采用一种基于提取函数的二值化方法来对传统帧差法加以改进。原理如下:
(1)
(2)
其中,f(x,y,j)为当前帧图像的灰度值;f(x,y,k)为前一帧图像的灰度值;Ek为提取函数;Bk为输出的二值化函数;T2为阈值,且T2∈(0,1)。
将通过视频文件分解出的一系列连续图像使用上述方法检测区域内的障碍物信息,对前后两帧图像之间的像素点进行对比,并采用卡尔曼滤波法去掉噪声。由于背景帧差法处理后留下的信息太少,所以需要使用边缘检测法获取溺水者的边缘信息并对检测结果进行修正。结合上述两种方法得到的信息并生成溺水者的位置信息,以此实现对溺水者的检测。
3 溺水快速救援系统工作原理
3.1 整体系统工作原理
无人机上配备救生设备及相机系统,在溺水现象发生时,营救人员在安全地点通过无人机传输回来的图像资料获取被救援者的位置等情况资料,并通过遥控器对无人机进行控制,使得无人机携带救生设备快速飞行至被救援者身边,通过感应人体红外线的方式,选择适当的高度和位置将救生设备进行释放,为提高救援的安全性,遥控器还设置了手动释放的功能,防止因传感器出现故障或失灵而影响救援。
3.2 控制系统工作原理
控制系统细分为三部分,遥控部分、电路控制部分、机械部分。在遥控部分采用无线遥控器,通过在无人机上安装的舵机控制器上连接无线接收模块,将舵机控制器与无线手柄通过无线频率相连。在ROBOIDE软件中编辑舵机所需的动作组,并将其下载到舵机控制器中,通过设置对应按键端口控制的舵机序号及命令组,对舵机进行控制,再通过舵机与机械部分的机械爪相连,控制机械爪的动作以及动作时间、动作间隔。实现对无人机前进、后退、左转、右转、上升、下降等的动作控制,以及对救生设备的抓取和释放等一系列操作。在发射时,当按下矩阵键盘不同的按键时,单片机对信号进行调制,使其产生相应的二进制控制脉冲,为了避免控制脉冲直接发射出去造成受到干扰和传播距离短的问题,将脉冲调制为40 Hz的载波信号,经由放大器放大,再由红外发光二极管发射出去。在接收部分,采用红外接收传感器,传感器由光敏二极管和光敏三极管组成,红外接收器接收到光信号,由于接收到的信号较为微弱,应加入放大电路,使得信号放大,再将信号传入到PC端,由PC端对电平信号进行分析处理,将信号从载波上分离出来,解调为相应的按键信息。再将所获得的信息通过电路控制机械爪的开合,使得机械装置对救生圈进行抓取、释放的动作。
3.3 新型救生气垫工作原理
新型救生气垫的优点主要有以下两方面:一方面为轻便小巧,便于携带,收缩程度大,可以最大程度上减少无人机的载重;另一方面,新型救生气垫使用高强抗拉TPU复合面料,配备微型高压储气钢瓶及充气阀门,采取高周波模具热合新工艺进行制作,成品可以自动充气,其工作原理是救生气垫落入水中后,水敏感元件遇水软化,自动装置中的撞针失去阻挡,在弹簧的作用下可刺破气瓶封口的薄膜,CO2气体立马将气垫充满,从而产生浮力,以救援溺水人员。
4 溺水救援设备的系统组成
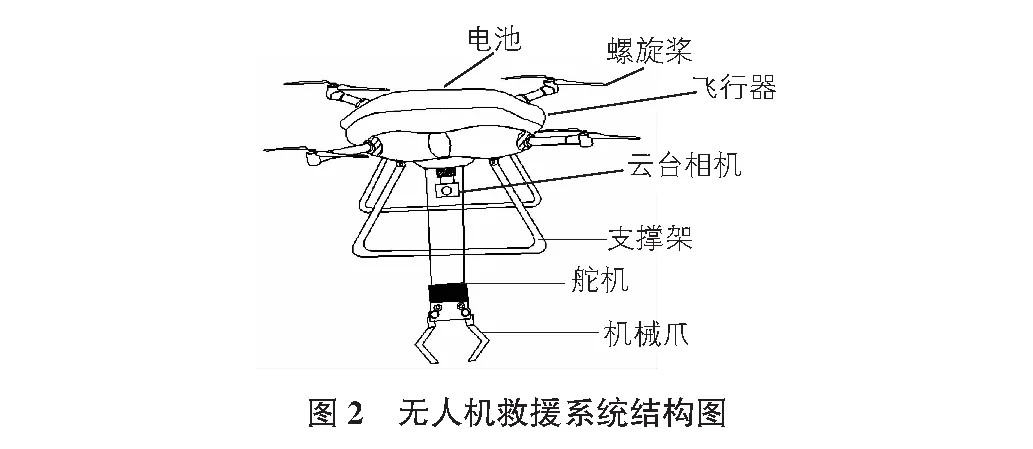
本系统由无人机、遥控器、投放机械装置构成,无人机救援系统结构图如图2所示。其中无人机中包含无人机机体、螺旋桨、云台、照相机、电池等装置。遥控器由遥控器外壳、编码集成电路、按键电路、红外线发射电路构成。投放机械装置由红外接收电路、机械爪、电源、机械臂等结构构成。无人机通过短绳与舵机和机械爪相连,机械爪夹持救生气垫。
5 实验流程及问题
选取3级风速的天气条件,进行溺水快速救援设备的实验,1号实验员控制遥感机,2号实验员作为模特,以便无人机进行图像采集。1号实验员控制携带新型气垫的无人机飞到2号实验员所在位置的上空,将机械爪松开,将气垫投掷到2号实验员周围,气垫遇水快速充气,从而实现救援行为。
实验发现,风速对无人机的影响较大。以大疆无人机为例,增加了平衡感应设置,使无人机能够更加平稳地飞行,研究发现,在6级以下的风力条件下,无人机可以正常执行飞行任务。此外,无人机的载重一般在10 kg左右,该载重远远大于气垫的重量,因此无需过多考虑无人机的载重问题。
实验表明,该系统具有其他海上搜救设备不拥有的优点:
1)随时性。通常,无法直接救援的溺水现场的特点是水情复杂,救援难度大。无人机的特点是机动灵活,便于携带,可快速飞到待救援地点。利用该救援系统可以随时监测水上情况,一旦发现险情,可以立刻进行救援,最大限度地降低伤亡水平。2)自识别性。加入图像语义分割算法的图像处理技术可以自动识别溺水人员,减少了PC端处理图像的时间,在溺水发生4 min~6 min的黄金救援期内实施救援行为。3)安全性。间接救援比直接救援更加安全,无人机的使用降低了救援风险。
6 结语
无人机的GPS全球定位系统和图像语义分割自识别系统,使得无人机救援系统的速度更快。无人机的操控简单,降落所需滑道较短,一般救援现场均可满足以上条件。此外,无人机造价低,控制灵活方便,甚至可通过编程对救援实现自动驾驶。因此,该系统可广泛应用于溺水救援。
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
健康体检与管理(2022年2期)2022-04-15
医师在线(2021年1期)2021-02-05
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
小资CHIC!ELEGANCE(2016年22期)2016-12-01
工业设计(2016年10期)2016-04-16
游泳(2015年2期)2015-03-27
舰船科学技术(2015年8期)2015-02-27
