
四旋翼机器人运动控制与自适应PID控制算法设计
2018-12-18 01:15:44龚兰芳许伦辉
机械设计与制造 2018年12期
龚兰芳,许伦辉
(1.广东水利电力职业技术学院 自动化系,广东 广州 510925;2.华南理工大学 土木与交通学院,广东 广州 510640)
1 引言
在新型材料、电子元件、机器人技术和模糊控制的飞速发展下,四旋翼机器人在最近几年有了长足的发展,并且在民用领域和军事领域都有广阔的应用前景[1-4]。四旋翼飞行器不仅可以垂直起降和悬停,而且可以实现前后、左右平移、俯仰和旋转等功能[5]。因此,四旋翼飞行机器人具有在危险场景,广阔区域和自然灾害等各个领域的强大的适应能力和扩展的能力。
在复杂的环境中,微型旋翼飞行机器人强调的是可控性、机动性和稳定性。旋翼系统潜在能力和背后的挑战正在吸引全世界科学界来进行深入的研究。例如:文献[2]指出,采用遗传算法(GA)、免疫算法(IA)、径向基函数(RBF)、模糊系统(FS)等几种智能控制方法对四旋翼机器人进行控制,并对其性能进行分析;结果表明,RBF在对四旋翼飞行器的俯仰和偏航控制的测试中具有最佳的性能。文献[3]介绍了一种四旋翼机器人动态参数的实验识别方法,通过对陀螺效应、空气动力学摩擦等现象的分析,得到了一种合适的控制模型。文献[4]通过拉格朗日方法得到四旋翼机器人的动力学模型,基于Lyapunov给出了闭环系统的全局稳定性分析。旋翼机器人主要应用于未知和危险的环境中进行监视、搜索和救援等。因此,旋翼机器人运动控制中的垂直,静止和缓慢的飞行能力似乎是不可避免的,这些运动特点使旋翼机器人的动态行为成为一个重要且不可或缺的要素。介绍了一种智能小型旋翼机器人运动控制与自适应PID控制设计算法,该直升机配备了一系列能够进行各种测试实验的传感器、控制器、执行器和储能装置。该机器人整体的系统功能完全根据适用于微型垂直起降需要而设计的。
2 四旋翼系统设计
智能四旋翼机器人在设计阶段所有组件的相互依赖性,使得每个组件的选择都受到所有其他组件的选择的强烈限制,反之亦然[6]。旋翼机器人设计过程中不仅要考虑到智能化、小型化的系统要求,而且要考虑到旋翼机器人的系统能耗问题,毕竟长时间有效的飞行才是旋翼机器人的关键。所以该小型化旋翼机器人采用的是轻量化结构设计。
2.1 设计方法
众所周知,四旋翼具备强动态不稳定性,只要简单地处理几个系统参数就可以提高稳定性。例如,在四旋翼的正交交叉配置中构建了简化的控制规律,优化了螺旋桨中心之间的垂直距离,以增加阻尼或减慢固有频率。另一方面,增大水平距离会增加惯性,对所有这些设计变量的改变需要遵循适当的方法。针对四旋翼机器人的系统能耗问题,采用结构化轻量设计的理念来减少飞行过程中能量损失过快问题。结合系统的理论知识和最小化的优化结果分析,提出了一种处理小型旋翼机设计问题的实用方法。
2.2 一般方法
四旋翼机器人设计的起点是定义系统的近似目标尺寸和重量,该指标一般由实际的相关应用决定[9],这给出了螺旋桨尺寸选定的一个最优的评价标准。使用螺旋桨的分析模型(例如叶片元件理论)或通过给定螺旋桨的实验特性,可以估计验证旋翼推力和阻力系数。对于四旋翼的特殊情况,经验法将最佳推力重量比固定为2:16,依靠螺旋桨的信息有助于建立一个可能满足功率要求的执行器数据库。对四旋翼机体和电子器件质量的粗略估计是必要的,主要依靠迭代算法可以估计其总质量与相关参数信息。
2.3 迭代算法
迭代算法的流程图,如图1所示。首先从执行器数据库中拾取一个执行器参数,用螺旋桨的模型估算其性能,在最大的平衡点计算系统总质量、功耗和推进器成本。而且,对于数据库中的每个执行器与电池质量变量进行估计,自适应和平均权系数作为整个系统质量的特征。
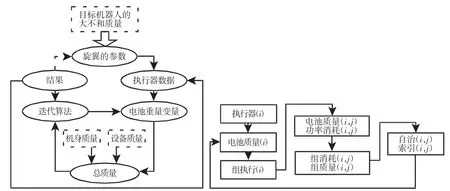
图1 设计方法与迭代算法流程图Fig.1 The Design Method and Iterative Algorithm Flowchart
3 四旋翼运动控制
3.1 本体运动控制
四旋翼机器人机体的机械结构对称,如图2所示。四个旋翼均在一个水平面内,运动特性具有几何对称的规律[7-8]。四旋翼机器人只能依靠改变电机转子的速度来进行悬停、俯仰、滚动和偏转,所研究的四旋翼机器人采用正交方式安装,其重心和中心重合。

图2 四旋翼飞行器Fig.2 Four-Rotor Aircraft
四个旋转器在一个正方形的四个顶点上。将四旋翼机器人从逆时针依次编队,前后位1旋翼和3旋翼,左右为2旋翼和4旋翼。同时根据四旋翼旋转的方向分为逆时针和顺时针。并且进行运动控制时,处于对角线旋翼的旋转方向是一致的,两个转子在对角线上。
建立四旋翼机器人的分析参考坐标系[9]。四旋翼机器人的航向角、俯仰角和翻滚角都与四旋翼机器人的这些坐标系联系在一起。所以要想正确平稳的控制无人机,就要分析各个坐标系之间的相互关系和转换关系式。其中,四旋翼机器人西旋翼1的扭矩为TW,南旋翼2扭矩为TS,东旋翼3扭矩为TE,北旋翼4扭矩为TN。d—旋翼升力作用点到质心的距离。无人机姿态姿态公式如下:

式中:ψ、θ、φ—偏航角、俯仰角和滚转角。
旋翼的速度控制表,如表1所示。根据这个速度控制表,可以完成悬停、前后、水平、俯仰和翻转等运动状态。

表1 旋翼速度控制表Tab.1 Speed Control of Four Rotor Helicopter
3.2 执行器运动控制
四旋翼飞行器是一个欠驱动的系统,因此它的水平运动主要是由于总推力的方向决定的(使用旋转矩阵):

3.3 水平的行动摩擦

4 模糊自适应PID控制器
四旋翼机器人整体系统组成包括:四旋翼自动驾驶仪为无人机的重要核心部件,作为姿态控制器保证飞机能够平稳的飞行[10]。姿态控制器的作用主要是保持飞机姿态和辅助操作人员操纵无人机。通过使用经典方法,将控制对象简化为线性和小扰动模型,然后把问题的重点放在控制小扰动模型。
4.1 PID控制器设计
PID控制器一直以来被广泛使用,具有设计结构简单,控制参数少和实现容易等特点。PID控制器长久以来是工业领域使用最多的控制算法之一[9]。传统的PID控制器原理图,如图3所示。式中u(t)—被控对象的控制量;e(τ)—无人机控制对象的误差输

图3 传统的PID控制器原理图Fig.3 Traditional PID Controller Schematic

入量;kp、kI、kD—比例、积分和微分控制参数。一般来说,对四旋翼机器人姿态模型要进行一定的简化,姿态控制器可以简化为:

令输入目标值为Ud,滚转角、俯仰角、偏航角目标值分别为φd,θd,ψd,滚转角、俯仰角、偏航角的测量值分别为 φ,θ,ψ,则对应的PID控制器可表示,如式(7)所示。

4.2 模糊自适应PID控制器设计
模糊自适应PID控制器结构,如图4所示。

图4 模糊自适应PID控制器结构Fig.4 Fuzzy Adaptive PID Controller Structure
4.3 控制器稳定仿真
使用 PID控制器(俯仰:Kp=0.7,Td=0.6。滚动:Kp=1,Td=0.6。偏航:Kp=0.4,Td=0.3),在MATLAB环境下进行了仿真。任务是从(φ=θ=ψ=π/4)初始条件稳定直升机姿态到(φ=θ=ψ=0)。 模拟的性能是令人满意的,如图5所示。在系统仿真中对系统加入一定的扰动信号,四旋翼机器人收到一定角度的扰动发生了倾斜,在控制器的干预下,能够迅速调整回原来的状态。在依靠MATLAB仿真环境,在实际飞行前进行了稳定性分析有助于软件算法的更方便修改,解决了在软件设计是否合理和准确性。

图5 仿真:PID控制器稳定姿态Fig.5 Simulation:The PID Controller Stabilize the Attitude
4.4 飞行实验
在进行系统仿真后,就可以进行一个真实的飞行实验,在四旋翼实验过程中只使用了IMU传感器进行姿态控制(横滚和俯仰:Kp=0.8,Td=0.3,偏航:Kp=0.08,Td=0.03)。机器人显示预测的推力。在进行实际飞行实验时候在周围环境较好的地方,如图6所示。排除其它的干扰在飞行过程中的扰动(例如大风环境中),四旋翼机器人在进行飞行过程中,改变姿态,能够迅速调整回至稳定的状态。从而验证了四旋翼运动控制算法正确性和实用性。然而,电机模块带宽似乎很慢,这是图6中振荡的部分原因,新版本的电机模块正在开发中。

图6 实验:用PID控制器进行首次试飞Fig.6 Experiment:The First Test Flight with a PID Controller
5 结论
四旋翼机器人的旋翼显十字分布,因其结构对称,比起传统的无人机有独特的优点,所以分析起来更为容易。在设计四旋翼机器人结构参数时,需要加入动力学有限元分析,有助于研究其飞行规律,避免设计失误。首先分析了四旋翼机构特征及其主要的用途,考虑到旋翼机器人系统能耗问题,给出了最佳推力和重力比。其次,利用了四旋翼的正交安装的结构特征进行系统设计,提出了一种迭代算法实现参数估计的流程。再次,进行了本体运动控制分析,实现了悬停、前后、水平、俯仰和翻转等运动状态。最后在四旋翼机器人飞行控制时,加入模糊自适应PID控制有助于四旋翼飞行器的平稳飞行,推导出一个非线性动力学仿真模型,达到了一个理想的效果,对于机身的单旋翼的推力和力矩控制更有利于分析。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
测控技术(2018年12期)2018-11-25 09:37:50
制造技术与机床(2017年9期)2017-11-27 02:13:45
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
