小型四轴飞行器控制系统的研究
2018-12-12 07:25:16李邵颖赵文娟王増彩
时代农机 2018年10期
李邵颖,赵文娟,王増彩
(沈阳工学院,辽宁 抚顺 113122)
四轴飞行器是一种结构新颖、性能卓越的新型无人机。具有适应性强、成本较低、控制方式便捷等优点,目前已广泛应用在农业、航拍、军事等领域。国外对四旋翼飞行器的研究偏向于电子领域、控制领域、以及材料领域的快速发展和技术突破。国内研究更多的是偏向于飞行器的飞行器建模、控制策略等方面的研究。
1 小型四轴飞行器系统的总体设计
此小型四轴飞行器以STM32F103CB为主控芯片,采用四元数,结合PID控制算法并利用RTX实时操作系统对其进行姿态控制。飞行过程中只需实时调整四个旋翼电机的转速即可实现各种复杂运动。通过MPU6050运动处理传感器采集等安装在四轴飞行器上的多个传感器并发处理,采集四轴实时飞行姿态,电池电量等信息。其四轴飞行器的遥控控制部分采用无线通讯模块WFT072.4 GHz。
2 小型四轴飞行器的硬件设计
四轴飞行器控制系统硬件部分主要包括主控模块、电源模块、无线通讯模块、MPU6050运动处理传感器、电子罗盘以及电机驱动模块等部分。
2.1 主控模块
四轴飞行器主控模块采用STM32F103CB芯片此系列芯片采用ARMCoretex-M3内核,具有低功耗、超高速等优点,四轴飞行器在工作期间STM32将接受到的遥控命令数据与将当前姿态与目标姿态进行比较,经PID控制算法,输出相应的PWM波到电机驱动模块,从而实现姿态调整。
2.2 电机驱动模块
电机驱动模块与普通MOS管元件组成电机模块不同。四轴飞行器采用的无刷电机需单独设计电子调速器作为电机驱动模块,并且还需考虑开关频率特性,依据电机控制速率选取不同工作频率元器件。
2.3 MPU6050运动处理传感器
MPU-60X0运动处理传感器是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪和加速度计,对陀螺仪和加速度计分别采用三个16位的ADC,将其测量的模拟量转化为可输出的数字量。解决了组合陀螺仪与加速器时间轴之差的问题,并且减少了大量的封装空间。
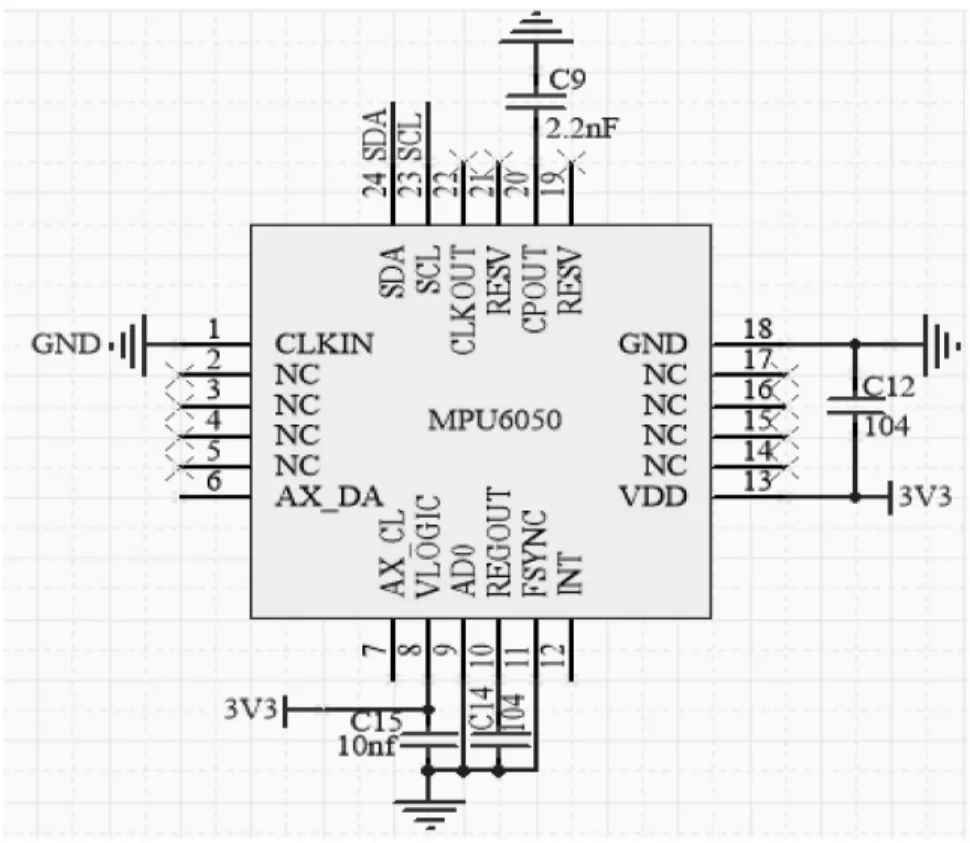
图1 四轴飞行器的运动处理传感器
3 四轴飞行器软件的设计
遥控器是一种用来远程控制某个装置的器件。本次设计借助了eclipse软件对四轴飞行器的遥控APP的手机应用进行编写,采用JAVA语言编程APP界面上设有油门滑块,偏航滑块用来控制四轴飞行器螺旋桨转速的快慢和偏航方向。
4 结语
本文主要介绍了飞行器完成的结果,已初步完成了基本的飞行动作,达到预期的标准。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
电子制作(2018年2期)2018-04-18 07:13:25
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18