对比度阈值函数修正对于NVThermIP模型的影响∗
2018-12-09 11:01:38吴元庆王洋张延涛张宇峰刘春梅
物理学报 2018年21期
吴元庆 王洋 张延涛 张宇峰 刘春梅
1)(渤海大学新能源学院,锦州 131012)2)(西北机电工程技术研究所,咸阳 712099)(2018年3月20日收到;2018年8月2日收到修改稿)
NVThermIP模型作为经典的性能模型,在指导红外系统参数的设计优化方面略有不足,因此需要构建更科学合理的综合评估模型.在经典模型基础上,结合人眼噪声的理论和实验研究,利用噪声等效温差修正了系统的对比度阈值函数.并利用现有的红外系统实验数据,对修正后的模型进行图像模糊和不同距离下辨识两方面验证,结果证明该模型具有很高的预测精确度,可为新型系统设计分析提供可靠的依据和理论指导.
1 引 言
红外成像技术的发展日趋成熟,在军品、民品中的应用也越来越普遍.但是新技术的出现、工作环境的改变都对红外成像系统提出了严格的要求,而且军用领域的敌方干扰破坏、民品中的环境刺激,都对红外探测系统的探测能力和生存环境等提出了更高的要求[1].因此,迫切需要一个准确的评估系统,既可以做出性能预测,又可以根据模型情况进行优化调整.性能模型法是评估系统中应用最广泛的方法,使用该方法既可以降低军用武器系统的损耗,又能精确、高效地完成评估任务,成为人们研究的热点[2,3].
NVThermIP模型是目前美国军方认可的性能模型,并作为行业标准而受到广泛关注[4],无论军用还是民用领域,其应用效果都非常显著.但是在指导系统设计方面,NVThermIP模型还稍显不足,无法提供对于系统参数的优化指导,一系列重要的性能参数也无法准确给出,因此需要对其进行改进和修正[5,6].
对红外系统而言,最大的干扰一般来自于噪声,噪声越小,系统探测的灵敏度和准确度就会越高[7].噪声等效温差(noise equivalent temperature difference,NETD)是衡量红外探测器性能的主要指标之一,曾有人提出将其引入到经典NVTherm-IP模型[8]中,用于指导系统设计.然而该方法仅是用NETD参数替换了模型中的其他参数,并引入修正系数加以调整,缺乏理论上的依据,说服力不足.
人眼视觉作为一个特殊的系统,其运行机制已经被证明无法用NVThermIP模型完全解释,大量实验数据也证明该模型存在一系列的缺陷[9].NVThermIP模型中关于人眼的噪声机制多采用经验值和估计值进行量化处理,在对比度阈值函数的建立中,采用Weber理论的经验常数α和显示器亮度水平进行描述,仅适用于显示器亮度不高的情况,没有完全考虑显示器帧频的差异对人眼系统的噪声影响,使得该模型的预测结果不够精确和可靠[10].
本文在人眼噪声理论的基础上,利用NETD结合经典理论模型,修正了NVThermIP模型中的系统对比度阈值函数.通过与现有实验数据的对比,证明了修正后的模型既可以准确地描述所获得图像的模糊效果,又可以对野外现场的红外预测进行准确判断,从而证明该模型有效.
2 NVThermIP模型中的系统对比度阈值函数修正
2.1 系统对比度阈值函数修正
作为理想的图像传感器,人眼系统辨识图像的能力取决于成像系统输出的图像质量,而对于红外系统的设计,需要对人眼视觉建立高度精确的理论模型[11,12].NVThermIP模型综合考虑了人眼的结构、眼球的震颤以及人眼滤波器模型等综合性能,对人眼视觉的描述基本清晰[13].但是经典的NVThermIP模型是基于Johnson准则建立的,采用极限频率作为预测红外系统性能的依据,没有考虑系统的灵敏度和信号传递过程,对于红外系统的噪声影响没有充分考虑,从而会导致预测错误[14−16].
在此基础上,Vllmerhausen等[17]提出了目标任务性能(targeting task performance,TTP)准则,该准则认为人眼获取到的视觉信息主要来源于图像中大于人眼视觉阈值的信号.因此,模型建立过程中,可以利用系统对比度阈值函数(CTFsys)来取代原模型中的最小可分辨温差函数,表明人眼在一定的目标背景尤其是红外图像下的目标信号分辨能力,从而可用于指导红外系统设计.
NVESD实验室基于TTP准则建立的NVThermIP性能评估模型,通过对比度和临界尺寸来描述目标特性,可以用于不同模糊程度图像的预测和辨识以及不同观测距离、不同背景下的图像识别[18].该模型在建立过程中,充分考虑了红外成像系统、光学信号传输以及图像显示过程中的模糊及模糊的传递,综合考虑噪声的影响并引入系统调制传递函数(MTFsys),得到了考虑模糊效应和噪声的系统对比度阈值函数(CTFsys),

其中,α是人眼噪声与显示器亮度的比值,是成像系统的噪声功率[19].
一般而言,人眼对于图像中目标信号的感知和获取,主要来自于信号与背景的对比度,而与图像本身的亮度关系很小,因此对比度阈值函数的建立至关重要[20].但是,该方法基于Weber定律,在对比度阈值函数的计算上认为人眼噪声与显示器亮度成正比,比值α一般取经验常数169.6.对于复杂的人眼系统,这种简化具有明显的局限性,而且该模型并没有充分考虑分辨力和灵敏度对于成像系统的影响.
基于上述研究,综合考虑红外成像分辨效果和系统反应速率的现场性能情况,结合人眼视觉的最新理论成果[21].本文提出,利用NETD重新构建CTFsys,进而修正和完善经典的NVThermIP模型.
利用红外成像系统中的噪声理论,将描述灵敏度的参数NETD表述为系统噪声N的度量方法,进一步将红外系统的噪声部分N转换成显示系统噪声σdisp.同时,通过最新的视觉模型得到人眼噪声σeye,替换原始模型中由亮度和经验常数决定的部分,进而将NETD科学地应用到NVThermIP模型中,使其表述更准确.修正后的系统对比度阈值函数表达式为

其中,ξ是一维方向空间频率,SMAG是系统放大率.
2.2 人眼内部的生理噪声
最新人眼视觉的噪声模型认为[22],人眼视觉的噪声主要包括两方面:一是由大脑决策信号产生的决策噪声,二是由外部光学信号造成的光子噪声.光子噪声部分受亮度影响,人眼噪声表达式为

式中,σdec为决策噪声,其数值需要通过视觉实验获得;σph为光子噪声,主要由人眼受到外界光学信号的影响而产生,光学信号的亮度不同时光子噪声也不同.光子噪声的计算公式为

其中,Apup为人眼瞳孔的面积,可通过测量瞳孔尺寸计算得到,瞳孔尺寸单位取mm;k为光子噪声的修正系数,通过实验数据统计,本文取值0.02;Qeye,t为人眼时域带宽.
人眼时域带宽的表达式为

其中,f为时域频率;MTFeye,t为人眼的时域传递函数,其值与人眼接收到的光强有关,光强不同,暂留时间τeye也有所变化,通常亮度为70 fL时,视觉暂留时间约为200 ms.人眼的时域传递函数计算表达式为

2.3 人眼感知到的成像系统噪声
NETD的定义表达式[8]为

其中,F为整个光路的光圈系数;τoptics为光路中光的透过率;p为探测器像元中心距;FF为探测器的占空比;QE为探测器量子效率;Tint为帧周期;ηi为电荷转移效率;参数C的表达式为

其中,M(λ,TB)为普朗克公式,TB是背景温度.
将NETD应用到NVThermIP模型中,需要结合光谱辐射对其进行转换,转换成红外成像系统的图像噪声,即N模型,具体的计算方法为


其中,L(λ,T)为黑体的光谱辐射亮度;C1和C2分别为第一和第二辐射常数,值分别为C1=3.741844×108W·µm4/m2,C2=1.438769×104µm·K;V为人眼视觉效能,本文在建模中取最佳值683 lm/W;R为转换常数,其值由光亮度单位之间的转换关系决定,本文在建模中取值为0.2919 L/Nit.
人眼最终感知到的成像系统噪声为

其中,Qeye,s是人眼空间域带宽,Qdisp+eye,t是成像系统和人眼的时域带宽.
3 实验结果与数据分析
基于上述的修正模型,使用MATLAB对该模型进行建模、仿真和有效性验证.主要从如下两方面展开研究:1)实验一,借助权威机构的图像模糊实验数据,对该修正模型的分辨能力进行验证;2)实验二,借助实验数据,验证修正模型的目标获取性能.
1)实验一
实验数据来自于2004年美国雷达电子技术研究所进行的目标辨认实验,该实验的主要目的是对不同车辆和人物的辨认情况进行分析.本文使用的实验数据主要是关于车辆辨识[13]的部分,辨识的目的在于观察者能够分辨出目标车辆的类别,数据包含12种不同类型的车辆,又分别从前后左右等12个不同的角度对每辆车加以辨识,所以共有144幅图像,如图1所示.

图1 辨认实验的目标图像 (a)不同的目标车辆;(b)同一车辆12个角度图Fig.1.Target image of the experiment:(a)Different target;(b)different perspectives of the same vehicle.
将144幅图像分成6组,每组都包含12种不同车辆的两个不同角度的辨识图像,采用高斯模糊对这6组图像进行不同的模糊处理,模糊程度如表1所列.由于图像的模糊程度决定了图像的清晰度,因此可以认为图像的辨认程度随着模糊程度的提高而逐渐降低,不同模糊效果的图像如图2所示.将最终的模糊效果交由观察者进行辨识,对不同模糊程度的图像分辨率进行统计和比较分析.高斯模糊函数的空间域表达式为

其中,b是模糊尺寸,其值越大代表图像模糊程度越严重;x是图像的一维空间坐标;s是归一化因子.

表1 6组图像对应的模糊尺寸Table 1.Fuzzy size corresponding to 6 groups.
模型的建立过程中,将模糊函数通过傅里叶变换,转变成频域表达式,并应用到红外系统中,作为系统的调制传递函数,进一步将其用于NVTherm-IP模型中,结合红外成像系统的设备参数和目标特性参数,建立修正后的NVThermIP模型.将该模型应用于现场性能预测,得到获取目标图像分辨率不同时的辨认概率PID,并通过目标辨认实验的现场数据对模型进行验证和比较分析.实验所采用的目标特征参数如表2所列.
采用修正后的NVThermIP评估模型预测的结果如表3所列,可以看出,随着图像模糊程度的加深,目标的辨认概率逐渐下降,符合实际经验,现场测试的结果也证明了该趋势的正确性.从辨认结果上看,在模糊程度相对较低的A,B,C组中,实验结果和模型预测结果趋势一致,误差相对较小.对于模糊程度较高的E组和F组,实验结果和预测结果差别明显,实验结果中模糊程度更高的F组获得的辨认概率为0.2041,竟然超过了模糊程度较低的E组(辨认概率0.1735).出现这种辨认结果与模糊程度相悖的情况,可能是由于测试观察者的主观原因,即对于不能分辨的图像存在心理暗示和随机记忆等,产生随机判断,使得辨认结果数据偏离预测分析.对于实验中出现的E组和F组这种辨认概率和模糊程序相悖的情况,可以通过增多观测人数、扩大模糊尺寸差距等方法加以改进和修正.该模型的总体误差很小,约为0.0838,低于0.1,属于可接受的正常误差范围.
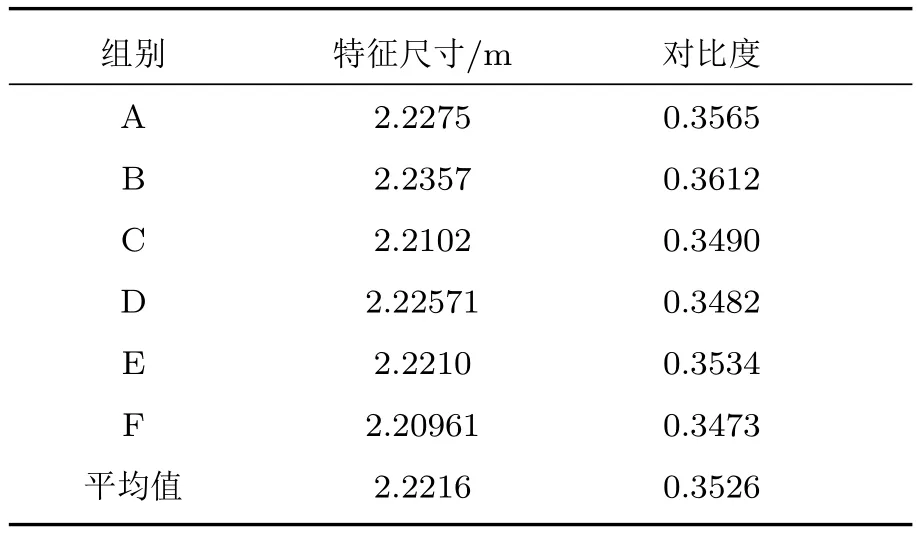
表2 目标特性参数Table 2.Target parameters.

表3 模型预测的辨认概率与实验数据对比Table 3.Comparison of model prediction with experimental data.
为了进一步验证该修正模型的正确性,对该模型进行调整,假设目标车辆的特征尺寸和对比度均为表2中数据的平均值,此时图像辨认概率仅与图像的模糊程度相关,建立仿真模型,进而得到在不同的模糊情况下,目标图像被正确辨认出来的概率曲线,如图3所示(表3中的模型预测值也来源于此).从图3可以看出,该修正模型能够很好地预测模糊图像的分辨能力,随着图像的模糊程度从5,10 pixels,逐渐过渡到25,30 pixels,模型预测图像的辨认概率直线下降,实验数据也证实了这种情况,从趋势上证明模型的正确性.同时,从预测数据结果上看,图3中仿真实验的预测结果与实际测试数据差距不大,除了前文所述的个别受主观影响的数据以外,预测数据基本上都分布在实验数据左右,说明该模型的预测结果大体能反映实验数据的真实情况.
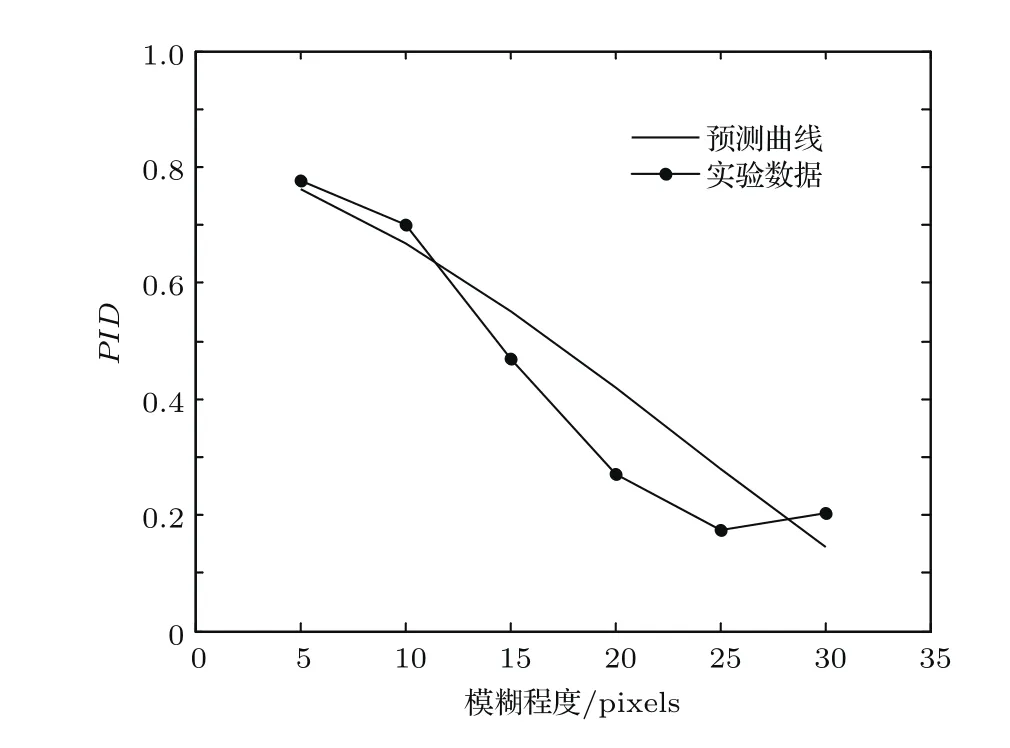
图3 不同模糊程度下的目标辨认概率Fig.3.Target recognition probability under different degree of blurring.
为了更直观地描述该模型预测结果的准确程度,本文以修正后模型的模糊辨认预测概率为横轴,以辨认实验的测试概率作为纵轴,构建坐标系,得到如图4所示的离散数据分布图.整个坐标系的对角线位置为预测数据和实验数据相等的点,因此数据点越接近对角线,说明预测结果与实验数据越相符.可以看出,本次仿真实验得到的6个数据点均紧密附着在对角线两侧且差距较小,从另一个侧面说明修正后的NVThermIP模型预测数据的准确性,证明该模型的预测效果可以用于指导实验.

图4 模型预测结果和实验数据的关系图Fig.4.Relationship between model prediction results and experimental data.
2)实验二
借用美国夜视实验室的实验数据对修正后的NVThermIP模型进行可靠性验证,该实验是关于军事设备的夜视图像处理,主要是坦克战车的不同角度、不同距离的红外图像,目标图像如图5所示,图中共有11种不同类型的战车.实验共有20个观测者,在5个不同的观测距离对坦克的夜视图像进行型号辨认,并通过图像辨认效果最终确定红外成像系统的工作效果.本文利用该实验数据对修正后的模型进行验证,通过与真实实验数据的比较分析,来确定该模型在夜视现场中的性能是否可靠.

图5 11个同类目标Fig.5.Illustration of the eleven targets.
红外系统的设备参数如表4所列,所有目标参数取相同数值,特征尺寸(Ltgt)取值3.1 m,平均对比度(Ctgt)取值0.35,无外部噪声.

表4 红外系统参数Table 4.Parameters of infrared system.
将上述红外系统的性能参数、观测目标的特征参数以及观测距离等实验参数输入到修正后的NVThermIP模型,并利用该模型进行性能仿真,得到观测者在不同观测距离下用红外设备正确辨认出目标型号的概率,与实际实验数据进行对比,结果如图6所示.
由经验可知,随着观测距离的增大,目标图像的辨认概率会逐渐下降,仿真和测试结果均证明了这一点.由图6可知,随着观测距离的变化,仿真和测试实验结果的变化趋势相同,可见修正模型的预测结果与实际测试结果符合得很好,两者的数据相差较小.为了进一步分析该模型的有效性,在不同距离的测试数据点标注0.05误差棒用于确定仿真实验与测试实验的误差.可以看出,修正模型的预测结果基本上都在测试实验数据附近,仿真实验的误差均远小于0.05.同时,在特定观测距离,约为1.5 km时,仿真实验的辨认结果和测试结果基本相等,误差很小,从而进一步证明该修正模型的精确性.对仿真数据进一步分析处理得到该修正模型与实验结果之间的均方根误差,仅为0.03,从而可以证明该模型对于图像辨识能力的预测非常准确,可以用于不同距离下红外系统辨识度的精确预测.
同样,为了更直观地描述该模型对不同距离下预测结果的准确程度,以修正模型的模糊辨认预测概率为横轴,以辨认实验的测试概率为纵轴,构建坐标系,得到如图7所示的离散数据分布图,位于对角线上的点是最接近真实数据的点.图中接近坐标原点的两个数据点基本处于对角线上,其他距离稍远的3个点也与对角线相差不远,更直观地证明了该模型预测的辨认概率与实际测试结果非常接近,证明该模型可以对红外系统进行有效的评估,并用于指导设计.

图6 辨认概率与距离的关系Fig.6.Relationship between probability and distance.

图7 预测数据与实验结果的关系Fig.7.Relationship between prediction data and experimental results.
上述两个实验分别从图形模糊程度和观测距离两方面对修正后的NVThermIP模型进行了性能验证,通过与真实实验结果对比,证明该模型在用于红外系统的性能预测方面和野外实战方面都是有效的,仿真结果与实验数据契合度高、一致性强.同时综合考虑了红外系统和实际生产中的一系列性能参数,该模型完美地融入了人眼视觉机制,将NETD这一衡量灵敏度的参数引入到经典NVThermIP模型中,用于指导系统设计,从而为红外系统的性能优化提供可靠的理论指导.
4 结 论
一个性能可靠的评估模型可以有效指导红外成像系统的设计,是其性能优化的前提.红外系统的设计需要综合考虑其分辨力和灵敏度对系统的影响,因此需要将灵敏度度量参数NETD应用到性能评估模型中.在经典NVThermIP模型的基础上,本文以指导系统设计作为研究切入点,分析建模过程中存在的不足,结合现有的人眼噪声理论研究和实验数据,利用NETD对NVThermIP模型的对比度阈值函数计算方法进行了修正与完善,将NETD转化为成像系统噪声,再转化为人眼的感知噪声,从而将NETD应用到NVThermIP模型中.并从图像模糊程度和不同观测距离下的红外辨识两方面对修正模型进行验证,证明其具有高的准确率,可用于系统设计.修正后的NVThermIP模型对红外成像系统的评估预测更为准确,可以有效避免实物实验长周期、高消耗的缺点,对于系统的优化设计效率更高,具有重要的军事和经济意义.
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
金桥(2021年4期)2021-05-21 08:19:20
法律方法(2019年4期)2019-11-16 01:07:28
快乐语文(2019年9期)2019-06-22 10:00:38
电子制作(2019年7期)2019-04-25 13:17:14
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
优雅(2016年12期)2017-02-28 21:32:58