一种解决多个读写器电磁干扰的有效方法
2018-12-07 08:31,
单片机与嵌入式系统应用 2018年11期
,
(天津科畅慧通信息技术有限公司,天津 300399)
引 言
射频识别系统包括标签和读写器。射频识别技术是一种非接触式的自动识别技术,它通过射频信号对目标对象进行射频识别,并向目标对象获取相关数据。这种识别操作无须人工干预,可应用于各种恶劣环境,同时射频识别技术可以对高速运动的物体进行识别,且可同时对多个标签进行识别,操作起来方便快捷。
现有的射频识别系统包括:无源射频识别系统和有源射频识别系统,两者的本质区别在于前者的标签从读写器的发射波形中获取能量,后者的标签自身具有能源供应。
在无源射频识别系统中,射频识别系统的冲突包括读写器信号冲突和标签信号冲突。针对标签侧冲突,ISO18000-6B/C协议、国标协议的防碰撞算法都明确给出了解决标签的碰撞问题。而读写器侧的碰撞,由于标签是无源的,没有防读写器碰撞机制,因此在多读写器环境下同时向同一标签发射信号时,标签无法解码碰撞的读写器信息,造成读写器无法识读到标签。
1 读写器碰撞场景分析
1.1 载波同向

图1 两读写器载波同向干扰示意图
如图1所示,R1和R2是2个相邻读写器,当两个读写器同时工作时,其电磁场存在相互重叠的部分,即A区域。在此区域的标签,存在漏读的可能。这是因为若读写器R1和R2同时工作,在A区域的标签因为同时收到R1和R2的射频信号,这两个读写器的射频信号相互叠加,使得标签解调后的基带波形因相互叠加而变形,造成标签侧译码错误。因此标签无法识别读写器的空口指令,造成读写器R1和R2均无法识读该标签。
另一种可能引起漏读的情况是:当R1和R2分时发射电磁波,但处于相同的session中时,R1识读到重叠区A的标签,当R1结束识读后关闭电磁波,此时R2开启电磁波,造成标签无法掉电。因此在读写器R1下一轮识读时,因为标签时隙计数器值很大,无法识读到标签。同理,读写器R2也存在无法识读到标签的情况。
1.2 载波相对
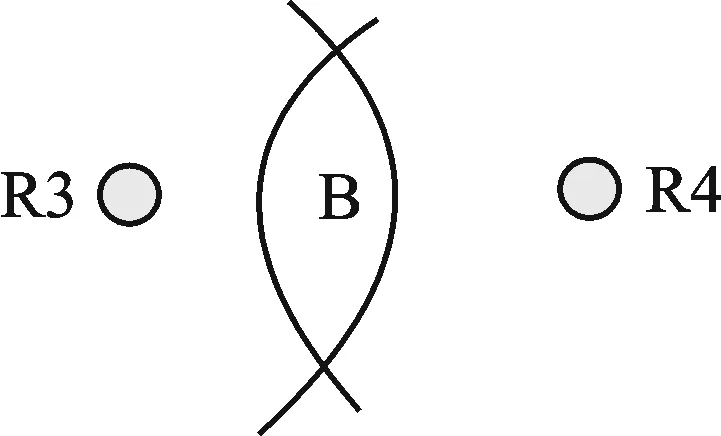
图2 两读写器载波相对干扰示意图
如图2所示,读写器R3和R4相互朝对方发射电磁波,此时重叠区域是B。当R3和R4同时发射载波时,载波信号会相互叠加。在B区域内的标签同样会因为信号相互叠加变形而无法正确译码,造成读写器R3和R4识读标签失败。
当R3和R4不同时发射载波,但处于相同的session中时,R3识读到B区域的标签,关闭载波,此时R4发射载波,由于B区域内标签没有掉电,标签时隙计数器值很大而无法识读到该标签。
2 读写器防碰撞方法
传统解决干扰的方法主要有三种:时分复用(TDMA)、频分复用(FDMA)、码分复用(CDMA) 。
TDMA为时分多址技术,其是把时间分割成周期性的帧,每一个帧再分割成若干个时隙,在满足定时和同步的条件下,发送端发出的信号都按顺序安排在预定的时隙中传输,各接收端只要在指定的时隙内接收,就能在合路的信号中把发给它的信号区分并接收下来而不混扰。
FDMA为频分多址技术,通过把通信系统的总频段划分成若干个等间隔的频道分配给不同的设备,由于各设备占用不同的频率,即采用不同的载波频率,接收时通过滤波器选取特定频段的信号并抑制无用干扰,从而接收到正确信号。
CDMA为码分多址技术,其原理是将需传送的具有一定信号带宽信息的数据用一个带宽远大于信号带宽的高速伪随机码进行调制,使原数据信号的带宽被扩展,再经载波调制并发送出去。接收端使用完全相同的伪随机码,与接收的带宽信号作相关处理,把带宽信号换成原信息数据的窄带信号即解扩,以实现信息通信。
上述多址机制不能直接应用在射频识别系统中,这是因为:
① 在FDMA 方式中, 读写器使用不同的频率和射频标签通信。由于射频标签没有频率调谐电路, 因此射频标签不能选择一个特定的读写器与其通信。如果射频标签增设频率调谐电路功能, 将大大增加射频标签的成本, 因此FDMA不适合应用在射频识别系统中。
② 在TDMA 方式中, 读写器被分配不同的时隙, 以避免读写器同时询问/发送射频信号。这就要求读写器之间互联互通,并且有一定的算法。在移动式网络中, 没有干扰的读写器因为相互靠近而出现干扰, 需要重新分配时隙。动态分配时隙降低了RFID 系统识读速率。
③ 在CDMA方式中,要求电路上有更为复杂的标签电路, 标签的使用数量往往非常大,考虑到成本因素,标签电路应该尽量简单, 所以一般不会采用CDMA。
3 系统设计
3.1 设计思想
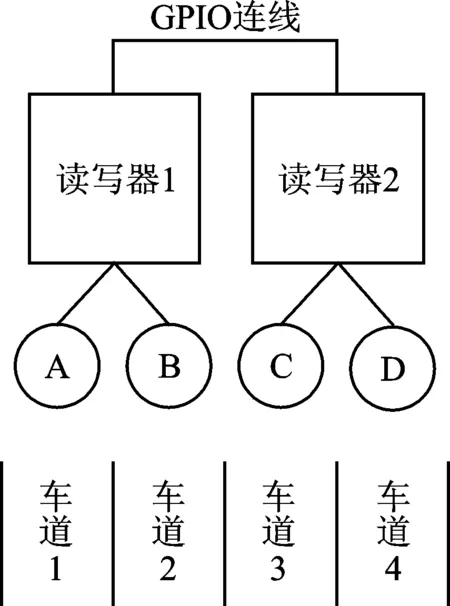
图3 读写器干扰解决方案示意图
如图3所示,读写器1连接天线A和天线B,读写器2连接天线C和天线D。其中天线A对应车道1,天线B对应车道2,天线C对应车道3,天线D对应车道4,天线B和天线C是不同读写器的相邻天线,存在相互干扰的情况。
为了让读写器1和读写器2互不干扰,需要将二者完全分时工作。本文给出了一种设计思想,通过读写器的GPIO端口协调两台相邻车道的读写器分时工作,具体就是用一根线连接读写器1和读写器2的GPIO端口。这根线起到为两台读写器通信的作用,代表读写器的空闲和工作两种状态,比如低电平表示空闲,高电平表示工作。
每台读写器都在同时工作,但是当工作天线是两个读写器相邻车道的天线(简称碰撞天线)时,就需要判断另一台读写器碰撞天线的状态(空闲或者工作)。若另一台读写器空闲,则可以下发标签识读指令,否则需要等待,直到另一台读写器碰撞天线状态为空闲。当然,等待需要有个超时时间,不然就会存在一台读写器一直工作、另一台读写器不工作的情况。超时时间的数值可以根据实际应用场景设定。
3.2 设计流程
图4给出了解决读写器相互干扰的具体流程。流程如下:
① 当前读写器开启一轮识读时,首先判断当前天线是否是另一台读写器的碰撞天线,若不是,则进入正常的识读流程。
② 若当前天线是另一台读写器的碰撞天线,需要获取连接两台读写器的GPIO电平,这里假设低电平表示另一台读写器处于空闲状态,高电平表示另一台读写器处于工作状态。
③ 若GPIO电平为低电平,说明另一台读写器的碰撞天线处于空闲态,需要配置该端口GPIO为高电平,表示当前读写器在工作状态,同时设置工作超时定时器,以防止当前读写器一直工作下去。开始下发识读指令,获取标签信息。若当前天线识读完毕或者工作超时,定时器时间到,配置GPIO为低电平,表示当前天线工作完毕,状态是空闲态。
④ 若GPIO电平为高电平,此时说明另一台读写器碰撞天线处于工作态,需要不断查询GPIO电平,直到电平变成低电平,说明另一台读写器碰撞天线停止工作,当前读写器可以启动工作。再重复步骤③。

图4 读写器相互干扰解决方案流程图
4 实验结果及分析
实验环境框图如图2所示,准备两台超高频读写器,工作频率为922 625 MHz,空口协议采用EPC协议,前反向速率分别是80 kbps和160 kbps,反向编码方式是FM0。每台读写器连接一个天线,天线发射电磁波方向相向。在两天线电磁场的重叠区放置一个射频标签,分别对比了使用本文第3节解决方案前后读写器的识读情况,对比数据如表1所列。
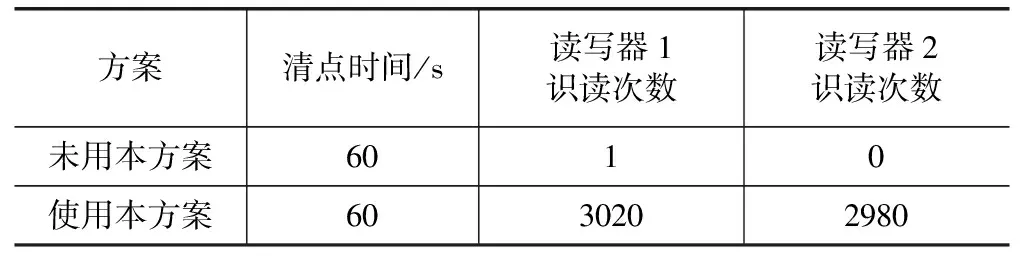
表1 读写器使用本方案前后识读次数对比图
从表1给出的实验结果可以看出:使用本方案后,读写器1和读写器2均能识读到重叠区标签,相比未用本方案的实验结果,可以看出大大提高了识读成功率,规避了标签漏读情况,完全解决了读写器相互干扰而无法识读重叠区标签的问题。这说明读写器轮动工作,相当于先进行冲突检测,在没有冲突的情况下,再进行识读操作,大大提高了识读成功率。
结 语

猜你喜欢
轨道交通装备与技术(2021年5期)2021-11-19
小读者之友(2019年9期)2019-09-10
东坡赤壁诗词(2018年6期)2018-12-22
汽车维修技师(2018年7期)2018-12-07
意林·少年版(2018年1期)2018-02-07
核技术(2016年3期)2016-04-19
CHIP新电脑(2016年3期)2016-03-10
中国交通信息化(2014年4期)2014-06-05
北京航空航天大学学报(2013年6期)2013-12-19
微处理机(2012年5期)2012-07-25