基于改进蚁群算法的多自主式水下机器人任务分配
2018-12-05 08:52刘瑞轩张永林
中国舰船研究 2018年6期
刘瑞轩,张永林
江苏科技大学 电子信息学院,江苏 镇江 212003
0 引 言
自主式水下机器人(AUV),即在与母船之间没有物理连接且无人驾驶的情况下,依靠自身携带的动力自主完成复杂任务的机器人。AUV的应用范围非常广,如海底考察、海底管线铺设和水下设备维修等民用领域[1-2],以及海底排雷、侦察和救生等军用领域。对单个AUV而言,其功能和容量均非常有限,难以满足大规模的任务需求。因此,多个AUV系统的概念应运而生,即通过多个AUV相互协调共同完成复杂的水下作业任务。这不仅可以弥补单个AUV的不足,也可以提高综合作业效率。
目前,多机器人的任务分配方法主要包括基于行为的分配方法[3]、市场拍卖算法[4-5]和群体智能算法[6]。其中,基于行为的分配方法的实时性和稳定性较好,但只能求取局部最优解;市场拍卖算法的实时性差且系统配置要求较高,但可以求取全局最优解;群体智能算法分为粒子群算法、鱼群算法和蚁群算法,该算法的鲁棒性好且计算效率较高。近年来,机器人自主任务分配方面的研究取得了较大进展,但鲜有多自主式水下机器人(MAUV)方面的研究[7]。
蚁群算法是一种模拟蚂蚁群体智能行为的仿生优化算法,该算法利用生物信息作为蚂蚁后续行为选择的依据,并通过蚂蚁协同作业来完成寻优过程[8]。蚁群算法多用于路径规划[9-10]及组合优化[11]等研究领域,而将蚁群算法用于MAUV任务分配方面的研究则较少,因为基本蚁群算法存在搜索时间较长和容易陷入局部最优解的缺点[12]。本文将以MAUV执行海底地形勘察任务为应用背景,针对基本蚁群算法的缺点,通过对剩余任务执行能力蚂蚁的选择方法、启发函数和全局信息素进行改进,由此实现MAUV全局任务的最优分配。
1 任务分配问题模型
假设MAUV的集合U包含NU个AUV,则每个AUV即为Uk∈U(k=1,2,…,NU),其属性采用四元素组表示(AUVID,POSk,Sk,Qk),分别表示每个AUV的编号、位置、能源消耗和最大任务执行能力。任务集合T包含NT个目标任务,则每一个任务即为Tj∈T(j=1,2,…,NT),其属性采用三元素组表示(TASKID,POSj,Sj),分别表示目标编号、目标位置和目标能耗。
任务分配后,Uk将分配到一个任务执行次序集合ψk,则Uk执行任务的目标位置依次为
MAUV的任务分配需要优先考虑以下情况:
1)MAUV的利益最大化,即对完成任务贡献最大的AUV将优先分配到任务目标。
2)尽量减少执行任务期间的能源消耗和航行距离。
3)考虑目标任务之间的均衡性。
1.1 MAUV协同作业的约束条件
1)每个任务均被分配至各个AUV,并按照要求执行,即
2)同一个任务不能分配给多个AUV,即
3)由于AUV自身的能源和续航能力有限,则Uk执行任务时的总能源消耗Sk应小于所有AUV的最大能源消耗Smax,同时Uk的续航距离Lk应小于所有AUV的最大续航总距离Lmax,即
1.2 数学模型
AUV与任务目标的距离越近,其航行距离代价越小,故应为AUV分配近距离的任务目标。对Uk而言,其航行距离代价模型为
式中,dij为第i(i=1,2,…,NT)个目标与第j个目标之间的距离,其中i≠j。
AUV的巡航过程分为直线匀速航行和转弯匀速航行,如图1所示。AUV在转弯时需要减速,故其转弯速度低于直线航行速度。假设不同的转弯角度对应不同的转弯速度,即
式中:υg为转弯速度,其中g(g=1,2,…,n)为航路节点;ag为转弯角度,其中0°<ag≤180°。
AUV航路上的任意连续3个节点即可构成一个三角形,ag即为以中间节点为三角形顶点的内角,如图1所示。
AUV巡航时的水阻力F为
式中:C为水动力系数,其值与介质特性、AUV形状及迎流面积等有关,根据经验,一般取值为0.7;ρ为水介质的密度;υh为航行速度;s为横截面积。
忽略推进器之外的元器件发热和能耗,AUV在巡航过程中的能量损耗主要来自克服水阻力做功,即
式中:Wg为AUV的巡航能耗;t为巡航时间;υz为直线航行速度;r为AUV转弯半径。
AUV的总能耗Sk包括到达目标点过程中克服水阻力的能耗W和到达目标点j后的作业能耗Sj这2个部分,即
1.3 性能评价指标
MAUV的任务分配方案可以通过多个指标进行评估,由于各个性能指标之间可能存在冲突,故任务分配方案不存在唯一的全局最优解,需进行归一化处理。本文建立的数学模型将考虑完成任务所需的航行距离代价Lk和能源消耗代价Sk,从而得到MAUV协同任务分配的性能指标函数H
式中,ω∈(0,1),为性能指标中Lk和Sk的所占比重加权数,ω>0.5表示任务分配时以能源消耗代价为主,ω<0.5表示任务分配时以航行距离代价为主。
2 改进的蚁群算法
2.1 基本蚁群算法
蚁群算法是一种元启发式算法,具有问题求解快速性和全局最优特性等优点。蚁群算法的核心是状态转移概率和信息素更新规则,状态转移概率的表达式为
式中:pij(t)为t时刻从目标i转移到目标j的状态转移概率;τij(t)为t时刻在目标i和目标j之间的路径上残留的信息素值;α为信息启发式因子,反映转移过程中所积累的信息对任务转移的影响;β为期望启发因子,反映选择任务转移路径时启发信息的受重视程度;ηij为启发函数,即蚂蚁从当前目标i到目标j的代价,
所有任务完成一次求解即完成一次循环,并同时更新信息素值(从t时刻更新为t+1时刻),即
式中:δ∈(0,1),为信息素挥发系数;1-δ为信息素残留因子;Δτij(t)为本次循环的信息素增量;X为信息素强度。
鉴于蚁群算法存在易出现停滞现象和陷入局部最优解的缺点,本文将针对剩余任务执行能力蚂蚁的选择方法、启发函数、全局信息素更新方式和局部搜索方式这几点进行改进。
2.2 蚁群协调机制
对于MAUV的集合U,其任务分配计划AC将由蚂蚁子群ACk和蚂蚁组群AGv(v=1,2,…,m)分别构造的NU个任务行和m个任务列组成,其中ACk∈AC且AGv∈AC。
式中,Antk,v为第k个蚂蚁子群中的第v只蚂蚁。
AGv为来自不同蚂蚁子群ACk的NU只蚂蚁构造的任务列,即
蚁群算法的任务分配有多种状态转移方式,例如,从组群中随机选择一只蚂蚁或依次轮流进行状态转移。本文将根据组群内剩余蚂蚁的执行任务能力、剩余航程长度来选择蚂蚁,第m个组群内第k只蚂蚁的状态转移概率为
上述式中:Ek为MAUV剩余任务的综合指标;为第k只蚂蚁的剩余航程为第k只蚂蚁的剩余任务执行能力;为第k只蚂蚁当前已经分配目标所需的航行距离;为第k只蚂蚁的最大航程;为第k只蚂蚁的最大任务执行能力;为第k只蚂蚁已经消耗的任务执行能力。
由上式可知,剩余任务执行能力多、剩余航程长的蚂蚁可以优先选择新的任务目标,这种选择机制可以使MAUV的任务分配相对均衡。被选中的蚂蚁将根据信息素浓度和启发信息进行状态转移,并选择下一个任务目标。
2.3 全局信息动态更新
每一次迭代结束后,将根据式(14)和式(15)对当前最优路径进行信息素全局更新,即
式中:L1为到目前为止的最优路径长度;Lg为本次循环的最优路径长度。
每次迭代后,如果L1>Lg,即说明本次迭代的路径更优,则式(22)应增加本次迭代所得的最优路径信息强度,保存本次迭代的最优路径;如果L1<Lg,即说明本次迭代得到的路径没有到目前为止的最优路径好,则式(22)应削弱本次迭代所得的最优路径信息素强度。为避免路径的信息素过度集中,应采用信息素最大/最小策略,以避免算法陷入停滞状态。假设式(14)计算所得的信息素范围为,其中τmin和τmax为设定的信息素最小值和最大值。若τij(t)<τmin,则修改τij(t)值,令τij(t)=τmin;若τij(t)>τmax,则修改τij(t)值,令τij(t)=τmax。
2.4 局部搜索策略
为提高最优解的质量,本文将采用2-opt算法对多组蚁群算法每次迭代所得的路径进行优化。具体实现方法是:在所有蚂蚁组群实现一次循环搜索之后,对所有路径均采用2-opt算法进行局部搜索,如果局部搜索所得的新路径优于原有路径,则代替原有路径。
改进算法的具体实现步骤如下:
Step 1:算法初始化,建立蚂蚁子群ACk和蚂蚁组群AGv。
Step 2:开始一组蚂蚁搜索。
1)Antk,v∈AGv,根据状态转移规则寻找下一节点,直至所有节点已被访问。
2)采用2-opt算法对所有的蚂蚁路径进行局部搜索优化。
3)计算每条蚂蚁路径的代价。
Step 3:重复Step 2,直至完成m组蚂蚁的搜索,完成一次循环。
Step 4:记录该次循环的最优路径,进行全局信息素更新。
Step 5:判断是否达到最大循环次数或连续若干次循环的最优解无变化,则停止计算;否则重复Step 2,进行新一轮的循环搜索。
2.5 收敛性证明
设p*(o)为多组蚁群算法第o次循环搜索时首次出现最优解的概率,对于任意小的数ε(ε>0),只要迭代次数o足够大,即成立p*(o)≥1-ε且
证明过程如下:
本文的多组蚁群算法采用了信息素限制策略,即任意路径上的信息素均被限制在τmin和τmax之间,则可行解的状态转移概率pmin>0,且
式中:ηmax为最大启发信息;ηmin为最小启发信息;为可行解状态转移的最小概率。对于任意解,均满足
式中:为任意解的状态转移概率;为栅格节点下的转移概率,其中为满足约束的最长可行路径的栅格节点。
只要有一只蚂蚁找到最优解,即可认为算法收敛,则p*(o)的最小限值为
由式(25)可知,对于任意小的数ε,只要o足够大,即满足p*(o)≥1-ε。当o→∞时,,即多组蚁群算法实现收敛。
3 Matlab仿真实验
在MAUV海底勘察的任务区域中设置14个需要勘察的任务目标点,每个目标点的位置及到达目标点的能源消耗数据如表1所示。4个AUV的起点位置相同,即坐标为(194,328)的T1(图2),最终均将回到起点位置。每个AUV的正常航行速度为3 kn,最高航速为5 kn。AUV在正常航行状态下的最大续航时间为24 h。4个AUV的初始状态均为100%满能,要求每个AUV的总能耗不得超过自身储备能源的90%。
改进蚁群算法的相关参数值设为:α=1,β=5,ω=0.5,o=50,m=20。

表1 任务目标的位置及能源消耗Table 1 Task location and energy consumption
MAUV采用改进蚁群算法的任务分配方案如图2和表2所示,4个AUV均从起点T1出发,T2~T15为任务目标点,每个AUV完成任务后均将返回至起点位置T1。由表2可知,4个AUV完成各自任务需消耗的能源均未超过限定值。该任务分配方案可以较好地平衡每个AUV的能源消耗代价和航程距离代价。
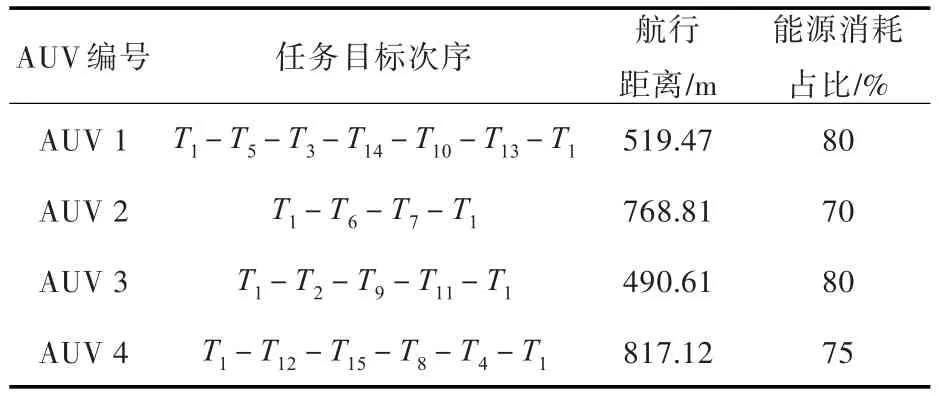
表2 任务分配方案Table 2 Task assignment scheme
为进一步验证本文多组蚁群算法的可行性,针对能源消耗代价和航行距离代价平衡时的性能指标值,将本文算法与文献[7]的自适应蚁群算法进行对比。2种算法分别进行50次任务分配实验,取每次运行结果的平均值,性能指标均值曲线如图3所示,仿真结果如表3所示。

表3 不同蚁群算法仿真结果Table 3 Simulation results of different ant colony algorithms
由图3和表3可知,改进蚁群算法在第14次迭代时的最优解为21.13,而自适应蚁群算法在第38次迭代时的最优解为21.63。可见,改进的多组蚁群算法比自适应蚁群算法的收敛速度更快,最优解更优,迭代次数也更少。
4 结 语
以MAUV执行海底地形勘察任务为应用背景,通过对基本蚁群算法的状态转移方式、启发函数、信息素更新和局部搜索方式进行改进,提出了一种基于改进蚁群算法的MAUV最优任务分配算法,该算法具备迭代次数少、收敛速度快等优点。在一定的约束条件下,改进的多组蚁群算法可以很好地实现MAUV的最优任务分配,并在分配任务的能源消耗与航行距离之间保持良好的均衡。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
海峡姐妹(2017年12期)2018-01-31
创新作文(1-2年级)(2017年7期)2017-12-26
语文世界(初中版)(2017年5期)2017-06-22
作文与考试·初中版(2017年12期)2017-04-19
汽车文摘(2016年7期)2016-12-12
科学与财富(2016年28期)2016-10-14