自主式水下机器人控制系统及声呐目标识别
2018-12-05 08:52张家敏曾庆军朱志宇戴晓强姚金艺
中国舰船研究 2018年6期
张家敏,曾庆军,朱志宇,戴晓强,2,姚金艺
1 江苏科技大学 电子信息学院,江苏 镇江 212003
2 江苏舾普泰克自动化科技有限公司,江苏 镇江 212003
0 引 言
地球海洋空间非常广阔,蕴藏了丰富的资源。随着陆地资源的日渐枯竭和世界经济、科技的不断发展,人类加快了对海洋资源的开发步伐[1]。如何合理开发和利用海洋资源,保护海洋生物及环境对人类社会的可持续发展具有重大意义。由于海洋环境存在复杂性与不确定性,通过载人探测进行海洋开发的方式风险较大,自主式水下机器人(AUV)便在此背景下应运而生。
AUV是一种无缆自主式水下机器人,与搭载的母船无连接,是通过自带的高能电池等能源实现自主航行。AUV具有较强的环境适应性、较大的活动范围和灵活性,是人类最优秀的水下作业工具之一[2]。AUV作为人类探索、开发、利用、发展海洋的重要工具,已被广泛应用于科学考察、海洋资源勘探、打捞救生、目标探测等领域[3-4]。例如,美国Ocean Seaver公司生产的Iver2 AUV已被广泛应用于海洋勘探、环境监测等领域。本文研发的AUV采用分段式结构,由艏段、艏部推进段、电子舱段、艉部推进段和主推进段5个部分组成。该AUV控制系统的硬件以PC104工控板作为核心控制单元,并采用摄像头PC104板卡单独进行摄像头图像数据处理,其软件基于移植在主控PC104板卡上的MOOS平台进行开发。在AUV执行水下任务时,声呐系统作为AUV的眼睛,对于AUV实现避障、导航、目标探测等功能有着不可替代的作用。
声呐目标识别通常包括图像预处理、目标检测、特征提取及识别等步骤。由于水下环境复杂,噪声干扰多,且声呐图像分辨率较低,导致声呐图像质量较差、边缘特征模糊,难以准确提取和识别目标特征。目前,在运动目标检测中常见的算法包括背景差分法、帧间差分法和光流法。其中,采用背景差分法检测目标实现简单,一般可提取出最完整的运动目标特征数据,但对环境变化适应性差;帧间差分法设计复杂度低,对环境的适应性强,但对于运动较慢的目标容易出现检测不完整的情况;光流法检测目标的精度高,同时适用于背景静止和变化的运动目标检测,但光流法计算复杂,抗噪性能差,难以实时处理[5]。
目前,在椭圆特征提取中,主要算法包括3种类型:
1)随机Hough变换法。此方法通过对像素点随机采样来检测椭圆,采用多维到一维的映射,避免了传统Hough变换一维到多维映射的巨大计算量,但对于复杂图像的椭圆检测,仍存在计算量大的弊端[6]。
2)采用数值分析方法拟合椭圆。此方法对噪声干扰不明显,且无需占用大量存储空间,如文献[7]采用最小二乘法拟合椭圆。
3)利用椭圆自身的几何特性,降低椭圆参数的维数,达到快速检测椭圆的目的。
本文将首先介绍“探海I型”AUV的系统组成和控制系统,分别描述声呐目标识别的原理和方法,以及该型AUV使用的Micron DST前视声呐。然后,选取声呐目标识别试验得到的典型帧进行目标检测和识别。研究中,运用三帧差分法进行运动目标检测,该方法可以较为完整地提取运动速度较慢的目标。采用一种基于Hough变换的快速椭圆检测算法提取目标特征,该检测算法避免了常规Hough变换椭圆检测计算量过大的问题,可以实现快速椭圆检测的目的。
1 “探海I型”AUV的组成与控制系统
1.1 系统组成
“探海I型”AUV由水上和水下设备组成。水上设备主要由笔记本电脑、水面控制箱、光纤绞盘(包含光滑环和水密光纤)组成;水下部分为AUV实体,由艏段、艏部推进段、电子舱段、艉部推进段和主推进段组成。表1所示为AUV的技术参数,图1所示为其三维结构图。
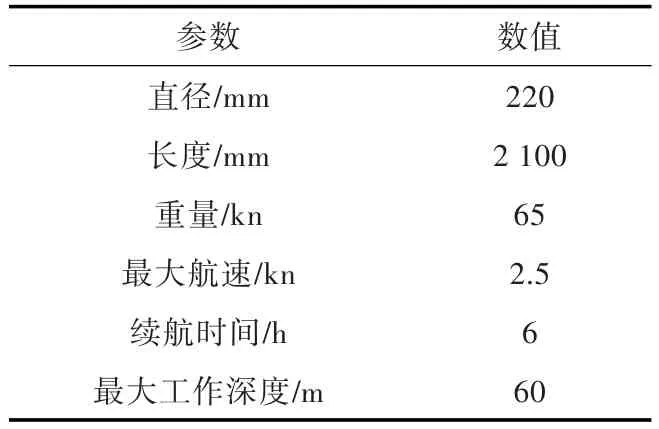
表1 “探海I型”AUV系统技术参数Table 1 Specifications of T-SEA I AUV
“探海I型”AUV各段组成如下:艏段包括水下摄像机、照明灯、前视声呐和艏段壳体;艏部推进段包括艏部2台侧向推进器、艏部2台垂向推进器和推进段壳体;艉部推进段与艏部推进段结构基本相同,区别在于艏、艉2个侧推螺旋桨及2个垂推螺旋桨的旋向相反;主推进段包括1台主推进器、安全抛载机构和壳体;电子舱段为AUV的核心段,主要包括舱段壳体、密封端板、多普勒计程仪(DVL)、天线、天线导流罩和主控舱,其中,主控舱安装在电子舱端内部,包括框架、光纤惯导、电池包、网络交换机、光端机、自动驾驶仪、电机控制器、摄像机PC104板卡、图像采集卡和无线数传设备。
图2所示为“探海I型”AUV实体样机。
1.2 控制系统
“探海I型”AUV控制系统由水面控制单元和水下控制单元组成。水面控制单元主要负责下达控制指令,监控运行状态;水下控制单元负责执行控制指令并返回水下机器人航行状态。上述单元典型的通信方式为网络通信和无线通信。水下控制单元采用PC104工控板作为主控制板,同时配备有单独的摄像头PC104板卡,用于摄像头图像数据处理。图3所示为整个控制系统结构框图。
“探海I型”AUV在设计上采用分布式控制系统。相较于集中式控制系统,分布式控制具有可靠性高、实时性好、容易维护等诸多优点。采用分布式控制系统的“探海I型”AUV的控制结构包括5个部分,即水面控制单元、自动驾驶仪单元、运动控制单元、信息测量单元及导航单元。电子舱段采用通信底板来进行整个AUV控制系统的走线,经通信底板将各控制单元与传感设备连接。AUV各传感设备和控制板卡通过通信底板连接至自动驾驶仪的PC104主控板卡。
2 声呐目标识别研究
2.1 声呐图像增强
本文先将声呐采集到的原始伪彩色图像转换为灰度图像,之后,再对转换后的灰度图像进行增强处理,包括2个步骤:灰度变换和中值滤波。首先,通过灰度变换扩大图像对比度,使图像变得清晰可见,使图像上相应的特征更加明显;然后,通过中值滤波来改善图像质量,消除图像在产生和转换过程中出现的噪声干扰[8]。试验中,采用线性灰度变换和5*5像素点的方形滤波模板的中值滤波方式来对声呐图像进行增强处理。
2.2 声呐目标检测
经过增强处理后的声呐图像存在的噪声干扰在一定程度上得到了抑制,目标和背景特征得以凸显。随后需要实现的目标检测功能是如何从背景中提取目标,即将目标和背景进行分离,以便于后续的目标识别[9]。本文采用三帧差分法对目标进行检测。此方法通过将采集到的三帧声呐图像进行两两做差,对差分后的两帧声呐图像进行二值化操作,然后对二值化处理过的图像进行逻辑“与”操作,最终检测出运动目标。三帧差分法可以改善帧间差分法无法完整检测出运动速度较慢的目标的问题,同时,由于声呐在水下保持着相对静止的状态,背景区域变化很小,所以采用三帧差分法可以实现良好的目标检测效果。采用三帧差分法进行声呐目标检测的具体步骤如下:
1)从声呐采集到的连续N帧经过增强处理过的图像序列f1,f2,…,fN中抽取3帧连续图像,记为Ik-1,Ik,Ik+1。分别对相邻2帧图像进行差分处理,将差分结果记为Dk,Dk+1,如式(1)和式(2)所示。
2)选取合适的阈值,对差分之后的两帧声呐图像Dk,Dk-1进行二值化处理,将处理后的图像记为dk,dk+1。
3)将二值化处理后的图像dk,dk+1进行“与”运算,最终得到目标的二值图像Lk。
由于存在噪声干扰,经过三帧差分法检测出的目标内部容易出现空洞,采用数学形态学“开运算”对得到的目标图像进行处理,可实现平滑目标边界和填充目标内部细小空洞的功能。
2.3 声呐目标识别
2.3.1 声呐目标边缘特征提取
目标边缘作为目标的基本特征之一,往往会携带大量信息,通过边缘特征提取,可以获得目标轮廓的相应信息,以为提取目标的椭圆特征做好准备。本文采用索贝尔(Sobel)边缘算子来提取目标物体的边缘特征。Sobel算子是一阶微分算子,它可从不同的方向检测图像边缘。该方法在获取目标物边缘特征时还加强了中心像素上、下、左、右4个方向像素的权重。其计算公式如下:
式中,fx'(x,y),fy'(x,y)分别为x,y方向的一阶微分;G[f(x,y)]为Sobel算子的梯度。求出梯度之后,通过设置一个常数T,当G[f(x,y)]大于常数T时,标记此点为边界点,其像素值设定为0,其他的设定为255。
2.3.2 基于Hough变换的快速椭圆特征提取
Hough变换作为一种检测、定位及解析曲线的非常有效的方法,具有鲁棒性好和对检测目标局部信息缺损不敏感等优点[10],其基本思想是利用点和线在图像空间与参数空间的对偶性,计算图像空间的像素点对应参数空间的参数值,然后在参数空间中搜索局部峰值,峰值对应的直线参数即为检测结果。由于Hough变换对噪声不敏感且稳健性好,使得其在检测目标时允许曲线存在小的缺损和形变,故在特征提取中得到了广泛应用[11]。
典型椭圆的几何方程如下:
式中:a,b分别为椭圆的长半轴和短半轴;(p,q)为椭圆中心坐标;θ为椭圆长半轴与x轴之间的夹角;(x,y)为椭圆上的任意一点。
一条直线y=ax+b只需要用a,b参数即可确定,从图像空间到参数空间映射形式简单,只需要在二维参数空间进行统计,计算量不大[12]。然而椭圆有多达5个参数,若采用常规方法,需在参数空间进行5个维度的累加,如此计算量将非常大。
本文拟采用一种基于Hough变换的快速椭圆特征提取方法,利用椭圆的几何特征来降低参数维度,从而实现对椭圆进行快速检测的目的。这种特征提取方法的核心思想是利用椭圆的如下几何特性:在整个待检测的目标图像中,椭圆中心点坐标是平面上所有点中距离椭圆边缘最大距离的最小点。特征提取步骤如下:
1)建立数组M,将目标的边缘坐标信息保存至数组M中,求取整帧图像中所有点至数组M中点的最大距离,则最大距离的最小点即为椭圆中心坐标(p,q),此最大距离为椭圆长半轴a。
2)将得到的椭圆中心坐标(p,q)和长半轴a代入椭圆方程中,获得关于b和θ未知量的椭圆表达式。
3)从图像空间转换到二维Hough参数空间,对b和θ值进行累加,累加最大值在Hough参数空间的位置坐标所对应的坐标值即为b和θ数值。
3 Micron DST声呐简介
如图4所示,本文研制的AUV前视声呐选用Tritech公司的Micron DST型机械扫描前视声呐。该声呐具有体积小、质量轻、功耗低、价格低等特点,可以实现对前方100 m距离的360°循环探测。同时,该声呐为数字式线性调频脉冲声呐,分辨率高。其通信方式采用RS232/RS485。表2给出了该声呐的主要技术参数。
在光纤遥控作业模式下,本文AUV搭载的前视声呐根据预先设置好的扫描距离、扫描范围等参数对前方一定范围内的区域进行扫描。在此过程中,声呐可以将得到的回波数据实时反馈给上位机进行成像处理。

表2 Micron DST声呐性能参数Table 2 Specifications of Micron DST sonar
4 “探海I型”AUV声呐目标识别试验
4.1 目标识别试验
目标识别试验在湖上进行。在试验前,需通电连接脐带缆进行设备检查,在确认各传感设备运行正常后,拔掉脐带缆,将光纤连接至AUV和岸基控制单元,然后将AUV布放在水中,开始试验。试验中,AUV保持相对静止状态,通过划船的方式带动目标运动,被识别的目标物体为一圆形铁盖。目标识别试验分为2个阶段:第1阶段目标距离AUV较近,声呐扫描距离设为10 m,扫描模式设为180°正常扫描;第2阶段目标距离AUV较远,声呐扫描距离设为20 m,扫描模式设为90°快速扫描。试验现场和被识别目标物体如图5所示。
分别选取试验第1阶段的2帧典型声呐原始图像和试验第2阶段的2帧典型声呐原始图像进行目标识别研究,如图6所示。经过图像增强处理后,得到如图7所示的4帧声呐图像。对图像增强后的4帧图像进行目标检测,得到如图8所示结果,从图8中可以看出,目标已从背景中提取出来。
4.2 声呐目标识别效果
针对被检测出的声呐目标,首先进行边缘特征提取,然后对边缘特征提取之后获得的声呐目标图像进行椭圆特征提取,结果如图9所示。从图中可以看出,提取出的目标特征近似为一椭圆形。同时由于存在噪声干扰,导致目标周围和内部的一些噪声点特征被一同提取出来。
本试验中采用的目标物体为一圆形铁盖,由于受水流的影响且目标物体在水下做不规则运动,使声呐扫描得到的目标物体实际上呈椭圆形。从目标检测和特征提取的结果可以看出,识别的目标近似为椭圆特征物体,这与本文试验采用的目标物体特征一致,证明了声呐目标识别试验的可靠性。
5 结 语
本文介绍了“探海I型”AUV的系统组成与控制系统,利用此AUV搭载的Micron DST型前视声呐,在苏州某湖进行了目标识别试验。采用三帧差分法对获取的典型声呐帧图像进行目标检测,同时采用基于Hough变换的快速椭圆检测算法进行特征提取,较好地解决了常规Hough变换进行椭圆特征提取导致计算量太大的问题。湖上试验结果表明,该AUV运行正常可靠,同时声呐目标识别效果较好,识别出的目标特征与试验中采用的目标物体特征相吻合。本试验中采用的声呐目标识别方法为AUV的声呐目标跟踪研究打下了基础。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
海军航空大学学报(2019年1期)2019-04-29
雷达学报(2018年5期)2018-12-05
智富时代(2018年12期)2018-01-12
智富时代(2018年12期)2018-01-12
吉林省教育学院学报(2017年7期)2017-09-22