
基于RPCA的单帧红外小目标检测算法
2018-12-04 06:08樊俊良高永明吴止锾
兵器装备工程学报 2018年11期
樊俊良,高永明,吴止锾,李 磊
(航天工程大学 a.研究生院; b.航天信息学院,北京 101416)
全天候的红外搜索与跟踪系统(infrared search and track systems,IRST)在军事应用上具有非常重要的意义,能弥补雷达探测需要主动发射电波的缺点,具有全天候检测的能力、良好的隐蔽性和抗电磁干扰能力。但是,红外成像能力容易受到探测距离和目标辐射强度的影响,探测距离越远成像目标越小,目标辐射越小成像目标强度越弱。因此研究红外图像的弱小目标检测技术是提升红外搜索与跟踪系统战斗力的重要途径。
目前红外弱小目标检测技术主要分为两大类:图像序列检测和单帧检测理论。图像序列检测理论是通过序列图像中目标的相关性来估计目标,如典型的三维匹配滤波[1],3D双向滤波方法[2],支持向量机和小波域的容和算法[3]。序列检测方法的前提是连续帧之间目标和背景的一致性假设,以及目标形状和速度的先验知识。这些前提条件和先验知识在应用中难以实现,因此基于单帧的小目标检测很受大家关注[4-5]。
典型的单帧检测方法中主要的一类方法是基于背景预测的方法,基于背景预测的方法主要有中值滤波、最小均方误差算法(TDLMS)、形态学滤波法。文献[6]中针对尺寸小和亮度暗的团状目标提出了高斯差分(DOG)法,该算法是将不同方差的高斯函数对图像进行卷积运算,然后做差分得到显著图,使小目标在显著图中得到凸显。文献[7]中提出了基于经验模态分解(EMD)和改进局部熵的小目标检测方法。文献[8]中将红外图像重新组建为一个patch-image模型,对新建patch-image的模型采用RPCA法来分离背景矩阵和前景矩阵,再按照构建patch-image模型规则恢复原图像和目标前景图像。本研究考虑到红外图像本身背景也具备低秩特性,小目标也具备稀疏性,提出了基于RPCA的红外弱小目标单帧检测算法。
1 RPCA基础理论
根据红外系统的成像原理,一幅完整的红外弱小目标图像通常由小目标、背景和噪声3个部分组成,可以表示为
D=T+B+N
(1)
其中:D表示原始红外图像;T表示小目标,B表示背景;N表示噪声。
在包含弱小目标的红外图像中,目标外形特征不明显、边缘模糊、目标像素少,通常表现为小亮斑。SPIE定义在256×256的图像中目标像素尺寸不超过9×9,约占图像像素0.12%的目标称为弱小目标,“弱”是指像素对比度低,目标不明显,“小”是指像素少。因此可以将目标T看成一个稀疏矩阵,即
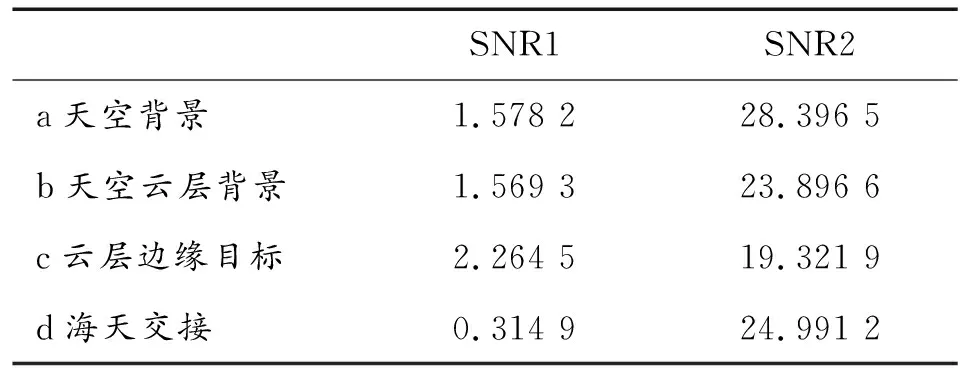
||T||0 (2) 其中||·||0表示求零范数,图像矩阵的零范数表示矩阵中非零元素的个数,参数k由小目标的大小和数量决定,在这里k≤m×n(m×n是图像矩阵D的大小)。 由于大气折射、色散、光学脱焦、透镜的畸变、衍射、镜像的变形、探测器倾斜,红外图像稍显模糊。文献[9]中指出普通红外图像依然存在非局部自相关特性,对于背景结构简单的红外图像,其背景大多表现为低秩特性。图1的第一行是4幅比较典型的红外图像,第二行是对应红外图像的奇异值曲线图,从图中可以看出尽管4幅红外图像各式各样,但是其奇异值都有相同的特点,即奇异值都快速的收敛至零。因此,可以认为红外背景图像矩阵B是一个低秩矩阵,可以表示为 rank(B)≤r (3) 其中:r是一个常数,参数r约束着图像的复杂程度,r越大图像越复杂。 这里不考虑图像噪声N,将这个红外图像模型简化成D=B+T,其中背景矩阵B可以看作是一个低秩矩阵,目标矩阵T可以看作是一个稀疏矩阵,因此小目标检测就可以转化为从一个图像矩阵中恢复低秩背景矩阵和稀疏前景目标矩阵。这个典型的矩阵恢复问题目前有两种方法来解决,即主成分析方法(PCA)和鲁棒性主成分析(RPCA),PCA主要解决背景矩阵在独立同分布的高斯噪声下的恢复,而RPCA法的条件就要广泛得多,只需要矩阵T具有足够的稀疏性,因此RPCA可以被用于红外弱小目标检测领域。 RPCA方法是Candes在主成分析(PCA)方法的基础之上提出的,主要针对PCA方法的效果局限于扰动矩阵为独立同分布的高斯噪声的问题,提出了将低秩矩阵和稀疏矩阵从高维矩阵中分解出来的鲁棒性主成分析方法。 对于给定的高维矩阵D可以表示为 D=B+T (4) 其中:B是低秩矩阵分量;T是稀疏矩阵分量。Wright等在文献[9]中在非常广泛的条件下已经证明只要稀疏矩阵T足够稀疏,RPCA方法可以比较精确的从D=B+T中恢复低秩矩阵B,具体表达为求解下面的凸优化问题: (5) 其中:||·||*是矩阵的核范数运算符,矩阵的核范数是指矩阵的奇异值之和;||·||1是求矩阵所有元素的绝对值之和;λ是一个常数。因此RPCA方法把分离背景图像和小目标转化为用数学的方法求解上述凸优化问题。 文献[9]中提出的基于IPI模型的RPCA目标检测算法能够成功分离目标矩阵和背景矩阵,但是这种算法使得图像矩阵维度激增,消耗时间更多,计算效率低。基于这种缺点,因此本研究提出了基于RPCA的单帧红外图像快速检测算法,算法的具体流程框图如图2所示。 在红外运动目标的图像中背景灰度分布一般是缓慢变化状态,运动目标的灰度分布一般是成突变状态。从频域的角度来看,背景区域一般变现为低频部分,运动目标区域表现为高频部分,因此利用背景和运动目标在频域上的区别,可以用频域高通滤波器和低通滤波器将它们分开。由于Butterworth高通滤波器对低频云层背景的有效滤除效果,本研究采用Butterworth高通滤波器对图像进行预处理。Butterworth高通滤波的传递函数 (6) Butterworth高通滤波的阶数决定了滤波器的形状,当阶数较高时接近理想频率滤波器。 RPCA方法的核心是求解一个凸优化问题,目前主要的求解方法有迭代阈值算法(IT)、加速近似梯度算法(APG)、精确的增广拉格朗日算法(EALM)、非精确的增广拉格朗日算法(IALM)、主成分追踪算法(PCP)。这些算法当矩阵维度越大,算法所需要时间越多,目前速度最慢的是IT法,算法速度最快的是IALM法,因此本文主要采用IALM算法。 拉格朗日乘子法是解决约束性凸优化问题的重要方法之一,它将原函数和约束条件整合为一个等式来求解。将拉格朗日乘子法运用到求解RPCA问题,可以将式(5)作如下定义: X=(B,T) f(X)=||B||*+λ||T||1 ,h(X)=D-B-T (7) 则拉格朗日函数是: L(B,T,Y,μ)≐||B||*+λ||T||1+ (8) IALM法具体的算法流程如下。 算法:基于IALM的RPCA算法input:Observation matrix D∈Rm×n,λ 1、Y0=D/J(D); T0=0 ; μ0>0 ; ρ>1 ; k=0.2、while not converged do.4、(U,S,V)=svd(D-Tk+μ-1kYk) ;5、Bk+1=USμ-1[S]VT.7、Tk+1=Sλμ-1k[D-Bk+1+μ-1kYk] 8、Yk+1=Yk+μk(D-Bk+1-Tk+1).9、μk+1=ρμk,k=k+1.10、end whileOutput:(Bk,Tk). 基于RPCA的目标检测算法将原图像分解为背景图像和前景图像,其中分解所得前景图像由于噪声和背景的干扰存在一定的杂波,需要进一步分割获得目标。经过分解后的前景图像,目标得到凸显,杂波比较微弱,因此阈值分割可以很好地分割出目标区域。 本研究采用简单的阈值分割技术,即: th=a*max(max(T)) (9) (10) 式中:a阈值限定因子;th表示阈值。 为了检验本文算法的检测效果,选用联想ThinkStation D30工作站,Intel Xeon E5-2620CPU,内存32G,在MATLAB2014a环境下,对4幅典型的红外小目标图像进行算法仿真。实验采用4幅比较典型的红外图像,包含天空(图3(a))、云层背景(图3(b))、云层边缘目标(图3(c))、海天交接(图3(d))这些比较常见场景下的小目标成像图。本实验采用的4幅图像大小不同,其尺寸大小具体是:图3(a)图尺寸为200×150,图3(b)图尺寸为281×240,图3(c)图尺寸为250×200,图3(d)图尺寸为280×228。 图3展示了4组图像的实验结果,分别展示了实验原图、前景目标图、前景目标三维图和检测结果图。图3(a)是天空背景下的小目标成像图,背景比较简单,目标比较独立,能够非常准确地检测出小目标。图3(b)存在少量的云层背景,与小目标独立分布,这类图像的小目标检测,主要看云层背景能不能很好地抑制,避免检测出虚假目标,从实验结果看本文的方法能够避免云层背景的干扰,前景目标图中目标得到凸显,能够准确分割出目标。图3(c)中目标被云层部分遮挡,背景云层起伏比较大,这类图像的小目标的检测,主要看能不能消除起伏云层背景的对目标检测的影响,区分开云层边缘和小目标。实验结果的前景目标图中目标比较明显,能够准确检测出目标。图3(d)是海天交接背景下的小目标,背景相对复杂,图像上下部分背景差异比较大,但是本文算法依然能够非常好的抑制背景,凸显目标,阈值分割后准确检测出小目标。 对实验图片处理前后图像信噪比进行统计,分析算法目标检测的能力,综合统计结果如表1所示。其中SNR1表示图像处理前的信噪比,SNR2为算法RPCA分解得到的前景图像的信噪比。根据信噪比对比可得本文算法处理后信噪比得到了非常大的提升,算法能够很好得凸显目标。 表1 算法前后信噪比对比 另外统计了本文算法具体仿真时间,时间保留两位数,具体实验时间如表2所示。通过对检测时间分析,本文算法计算效率比较高,计算时间基本保持在毫秒量级。另外本文算法对图像尺寸比较敏感,图像维度越大计算时间消耗越多,反之计算时间消耗越短。算法仿真时间对图像维度的敏感,主要因为算法计算中奇异值分解消耗大量时间,而维度越大奇异值分解越慢。 表2 不同尺寸下目标检测时间对照 通过实验可以发现: 1) 本文算法能够检测出像素少,无外观特征的小目标,并且不需要目标的先验知识,具有普遍适用性。 2) 本文算法能够适应大多数背景,检测效果比较理想。 提出了基于RPCA的红外弱小目标单帧检测算法,实现了单帧图像对无外形特征红外小目标的检测,通过对简单天空背景、云层背景、小目标与云层背景边缘重合、海天交接4类红外图像的仿真实验,验证了算法的适用性;对算法仿真时间统计,分析图像维度对算法仿真时间的影响。实验结果表明,基于RPCA的单帧红外小目标单帧检测算法检测效果比较好,但是算法速度会受图像大小影响。在实际生活中,图像的尺寸可能比实验图像要大得多,该算法的检测时间会达到几秒甚至是几十秒,因此如何提高算法的时效性还需要进一步研究。2 基于RPCA的单帧红外弱小目标检测算法
2.1 Butterworth高通滤波
2.2 RPCA矩阵分解


2.3 阈值分割
3 实验与仿真

4 结论
猜你喜欢
环球时报(2022-05-23)2022-05-23
汽车工程师(2021年12期)2022-01-17
金桥(2021年4期)2021-05-21
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
广东第二课堂·小学(2019年6期)2019-07-11
新作文·小学低年级版(2019年4期)2019-04-27
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
好孩子画报(2017年1期)2017-04-06
