
海底管道清管用新型水下发球装置研究
2018-11-29 08:36:26,,,,
石油矿场机械 2018年6期
, ,,,
(中国石油大学(北京) 机械与储运工程学院,北京 102249)
在海洋油气资源开发过程中,海底管道作为油气运输通道,地位重要。然而,海底管道常年处于低温状态,会出现结蜡和水合物凝结的现象,缩小了管道有效输送内径,甚至会堵塞管道,降低管道的输送效率。为了提高输送效率,必须定期对管道进行清管[1-3]。传统的海洋清管一般是采用“U型”环路的方式,即平台上将清管器发出,清理海底管道,然后在另一平台上回收清管器,如图1所示。

图1 传统“U型”海底管道清管示意
由于“U型”环路清管成本较高,因此研究了“单海管”清管方式,即在水下发射清管器清理管汇和立管,然后在平台上放置收球筒以回收清管器。选用单海管最重要的原因是“U型”环路需要建设2条水上到水下的立管,而单海管只需要铺设1条立管,从而大幅降低了清管成本。除此之外,单海管清管还具有管线中清理的蜡等不会到采油树和水下其他设备,生产无需中断等优点[4]。单海管清管是海底管道清管维护比较理想的手段,也是海底管道清管的发展趋势[5]。
1 发球装置结构
水下发球装置是单海管清管技术的核心部分,由快开盲板、发球单元及连接单元组成,如图2所示。该装置通过连接单元与管汇毂座连接,通过ROV控制阀门开启,操控发球单元动作,清管器顺序发出,在生产流体的推动下,清管器经过海底管道和立管,到达平台上的收球筒,完成清管作业。
整个装置长约2.5 m,宽约2 m,高约7.5 m,用于ø457 mm海底管道的清管作业。设计压力为15 MPa。
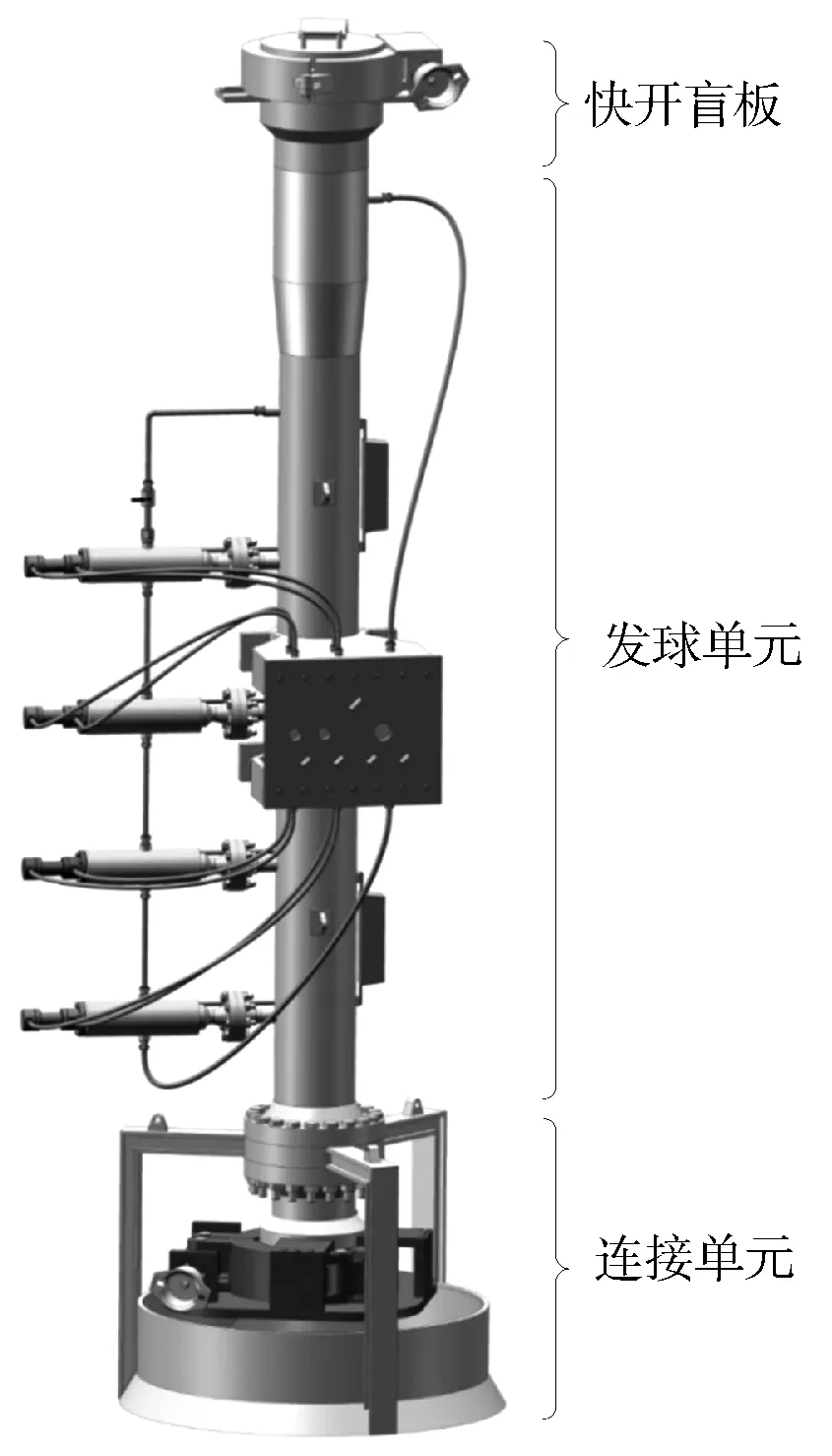
图2 水下发球装置
1.1 快开盲板
快开盲板适用于压力管道或者压力容器的开口处,并能快速打开和关闭。快开盲板主要有牙嵌型、卡箍型、插口型,其中,卡箍型快开盲板因其适应压力高、大口径而被大量使用[6]。快开盲板安装于发球装置上端,用来快速开启和关闭发球筒。快开盲板由毂座、头盖、密封圈、三瓣卡箍、丝杠螺母、ROV接口等组成,如图3所示。
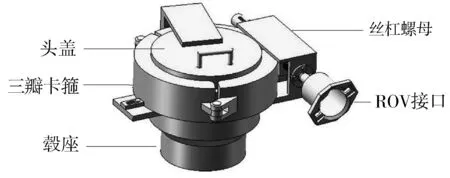
图3 快开盲板
当需要关闭盲板时,通过远程控制ROV正向旋转丝杠,卡箍移动,将头盖与毂座夹紧,夹紧力的竖直分力预紧两者之间的密封圈,实现密封;当需要开启盲板时,控制ROV反向旋转丝杠即可。
1.2 发球单元
发球单元由旁通阻隔机构、双作用单活塞液压缸、发球筒、控制面板、阳极块、液压软管等组成,如图4所示。旁通阻隔机构用来隔离清管器,通过阀芯的移动来改变内部流道的通断,实现顺序发射清管器的功能;双作用单活塞液压缸连接阀芯,给阀芯提供直线动力;发球筒用来储存清管器,本文中,发球筒存放4个清管器,也可以根据现场需求增加旁通阻隔机构个数,进而调节清管器存储数量;控制面板设计有液压飞线口,用来接入液压飞线,给发球装置提供驱动液(甲醇)[7]和液压油。另外设计有ROV旋钮,可以远程控制ROV,实现发球装置阀门的开启或者关闭,进而控制发球单元的动作;阳极块起到防腐蚀的作用,牺牲自己,保护发球装置不被海水腐蚀。
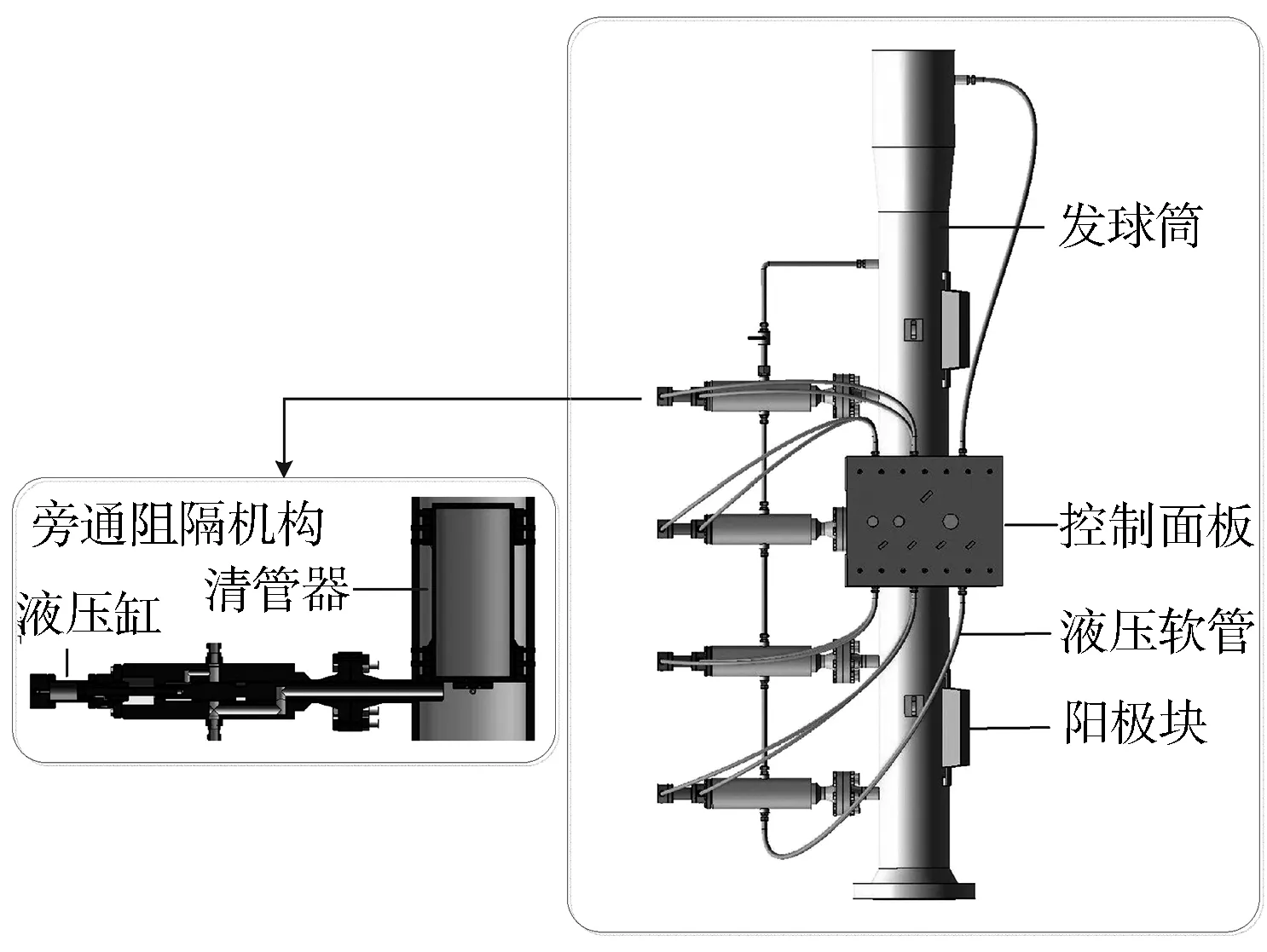
图4 发球单元
1.3 连接单元
连接单元包括卡箍连接器、毂座、导向机构等,如图5所示。卡箍连接器是连接管汇毂座与水下发球装置毂座的机构,由三瓣卡箍、丝杠螺母、ROV接口、密封圈、底座等组成。卡箍连接器底座起支撑整个机构的作用。
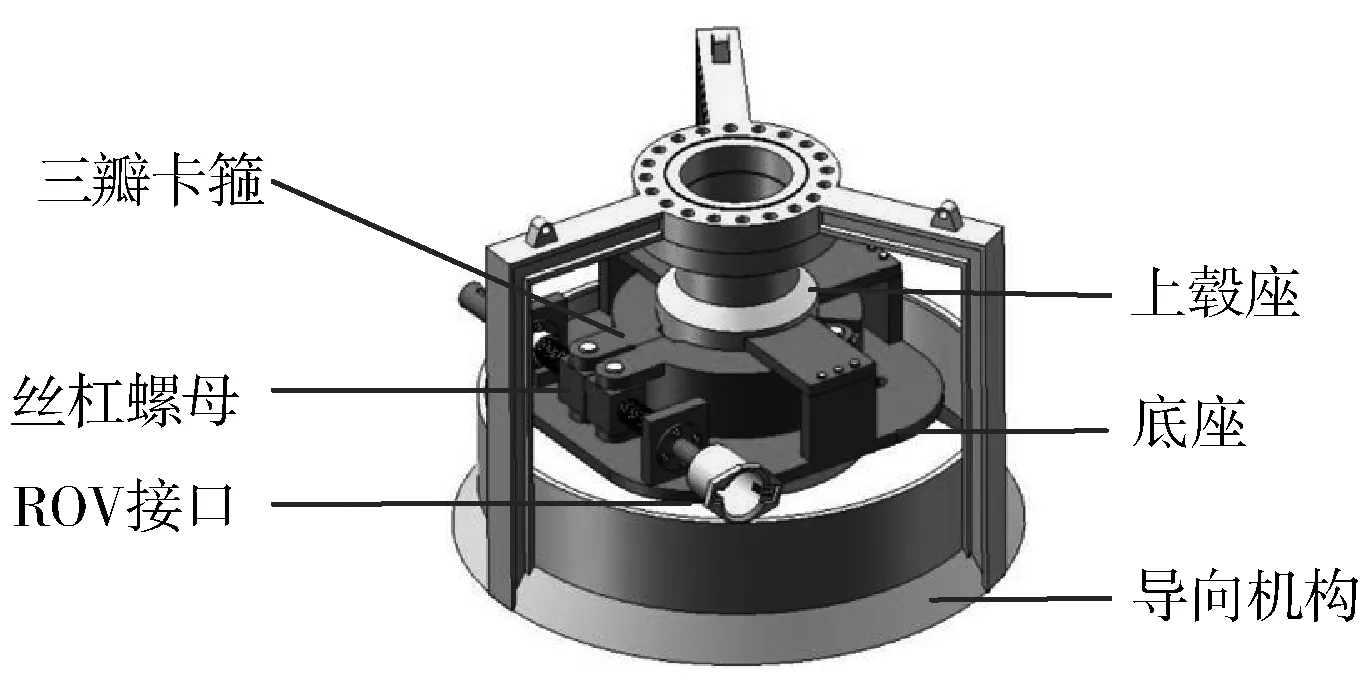
图5 连接单元
导向机构实现毂座与发球装置初步对中功能,其规格按照API标准设计,外径是管汇毂座外径的1.5倍,倾角为45°。远程操控ROV与接口对接,旋转丝杠使得卡爪收回,将发球装置的毂座与管汇的毂座夹紧,上下毂座受卡箍夹紧力的竖直分力压紧两者之间的密封圈,保证毂座面之间密封。
2 发球装置清管工艺流程
水下发球装置的工艺流程如图6所示。首先,工作人员在安装船上将发球装置调试好,并且填满清管器,将头盖盖好;用船上的吊机,通过钢丝绳将发球装置送到海底,到达指定位置并与管汇相连接[8]。需要清管作业时,通过主控台操控ROV携带液压飞线和电飞线[9]一起下到海底,一端与采油树相连,另一端与发球装置相连接,用来给发球单元提供驱动液(甲醇)和液压油。
在发球之前,暂时停止生产,并且关闭所有的球阀。工作人员通过操控发球装置发射第1个清管器,第1个过球指示仪发出信号时,说明清管器已经离开发球装置,此时将阀门换到中位,液压缸停止供油。当第2个过球指示仪发出信号时,说明清管器已经通过海底三通,此时关闭管道管汇终端的球阀,打开采油树闸板阀阀门,关闭液压飞线源,让生产流体驱动清管器继续前进,经过立管回到浮式生产储油装置上的收球筒,清理的废物到达相应污池中,第1次水下清管过程结束。后续的清管过程与第1次类似。
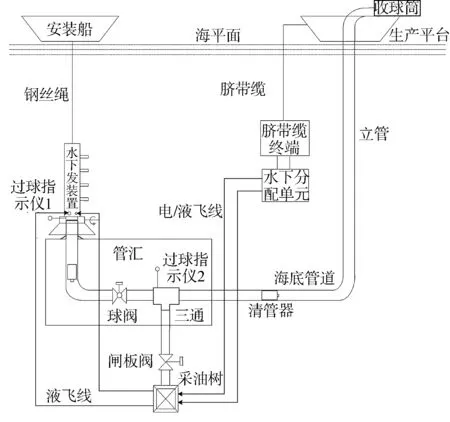
图6 海底管道清管工艺流程
2.1 发球单元工作流程
清管驱动液——甲醇经过旁通阻隔机构,进入发球筒,由于直板清管器与发球筒存在过盈且甲醇压力低,甲醇只能通过发球筒内小孔流到下一个旁通阻隔机构,依次类推,甲醇逐渐将整个发球筒充满,实现清管器前后压力平衡;接着液压缸活塞杆向左移动,将阀芯收回,此时发球筒甲醇入口关闭,甲醇全部进入下一个旁通阻隔机构,此时待发射清管器前端压力不变,而后端压力逐渐升高,当清管器后面压力足够大于前面压力时,清管器掉落。如图7所示。

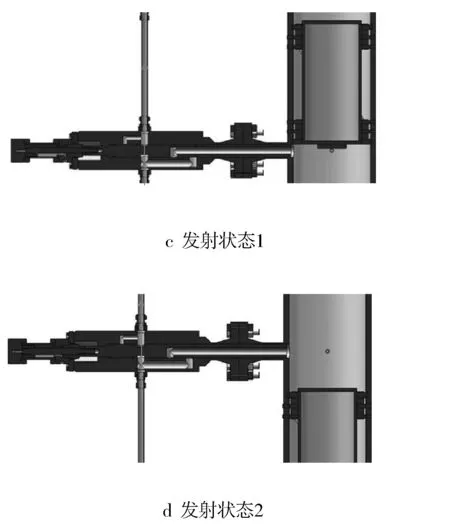
图7 发球单元工作流程
2.2 连接单元工作流程
当ROV与连接单元接口对接后,其携带的转矩工具正向旋转时,丝杠带动螺母移动,卡箍收回,锁紧两个毂座;反之,当需要松开毂座之间的连接,只需要控制转矩工具方向旋转即可。以转矩工具正向旋转为例,工作流程如图8所示。快开盲板工作流程与连接单元类似。
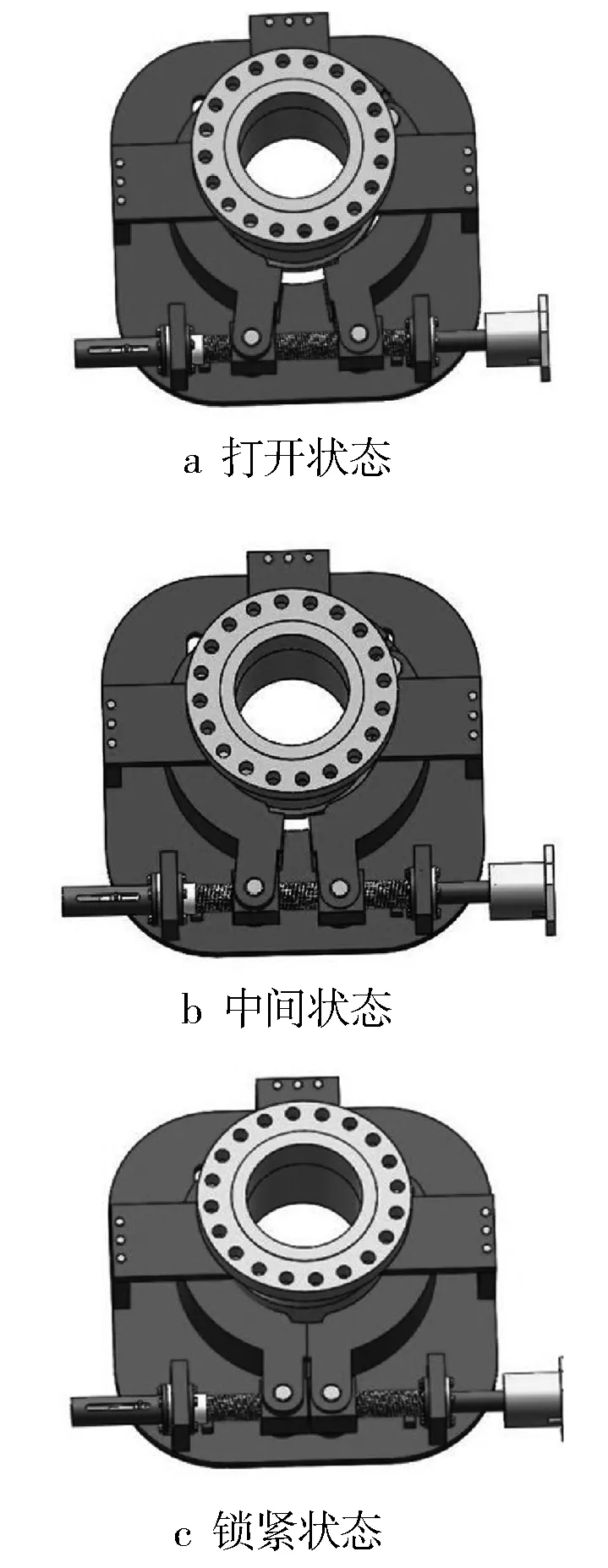
图8 连接单元工作流程
3 发球装置关键零部件校核
在海底管道清管作业中,水下发球装置的工作环境恶劣,在深水环境下受到作业水深的压力以及海流冲击等影响。为了保证发球装置在水下可以安全可靠的工作,选择快开盲板的头盖、发球单元的旁通阻隔机构阀体、发球筒以及连接单元的卡箍等关键零部件进行有限元校核。
3.1 快开盲板头盖
快开盲板的头盖为承压部件,为保证其可靠性,使用ANSYS软件对其进行强度校核。头盖材料为Q345锻件,其密度为7.87×103kg/m3,泊松比为0.31,弹性模量为2.12×1011Pa ,许用应力为174 MPa[10]。将最外圈固定,施加15 MPa压力。网格选择四面体网格,求解得到位移云图、应力云图如图9~10所示。

图9 头盖位移云图
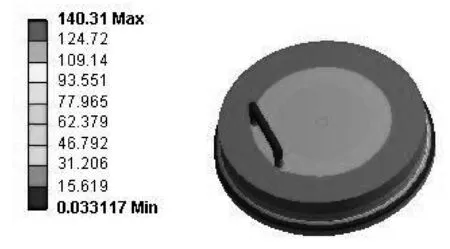
图10 头盖应力云图
由图9可知,位移最大值为0.15 mm,在许用变形的范围之内。由图10可知,应力最大值为140.31 MPa,小于Q345锻件的许用应力。故头盖满足强度要求。
3.2 旁通阻隔阀体
阀体为承压部件,使用ANSYS软件对其进行校核。阀体材料为Q345钢,其密度为7.85×103kg/m3,泊松比为0.28,弹性模量是2.06×1011Pa。网格选择四面体网格,求解得到位移云图、应力云图如图11~12所示。
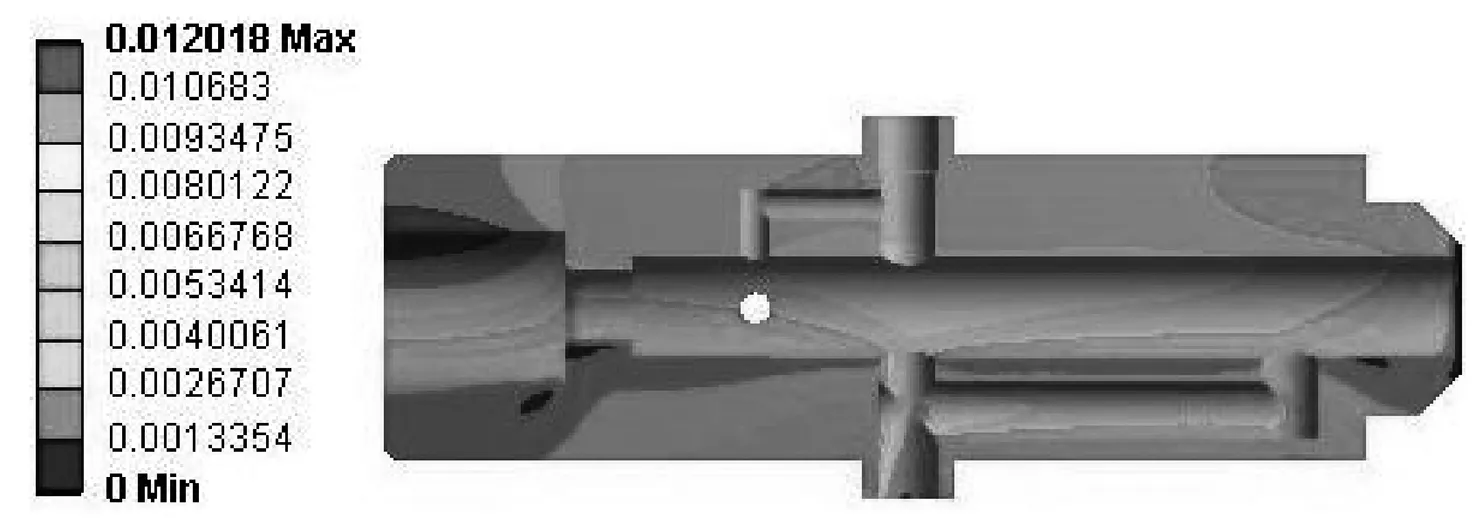
图11 阀体位移云图
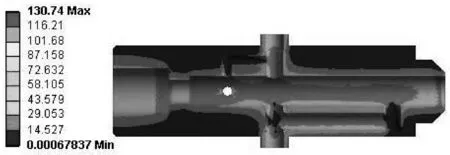
图12 阀体应力云图
由图11可知,位移最大值为0.01 mm,在许用变形的范围之内。由图12可知,应力最大值为130.74 MPa,小于Q345的许用应力。故旁通阻隔阀体满足强度要求。
3.3 发球筒
发球筒采用ø457 mm的无缝钢管,管材为X70,其密度7.85×103kg/m3,弹性模量2.1×1011Pa,泊松比0.3。发球筒一端完全固定,一端轴向固定,施加15 MPa压力。采用四面体网格,求解得到位移云图、应力云图如图13~14所示。

图13 发球筒位移云图
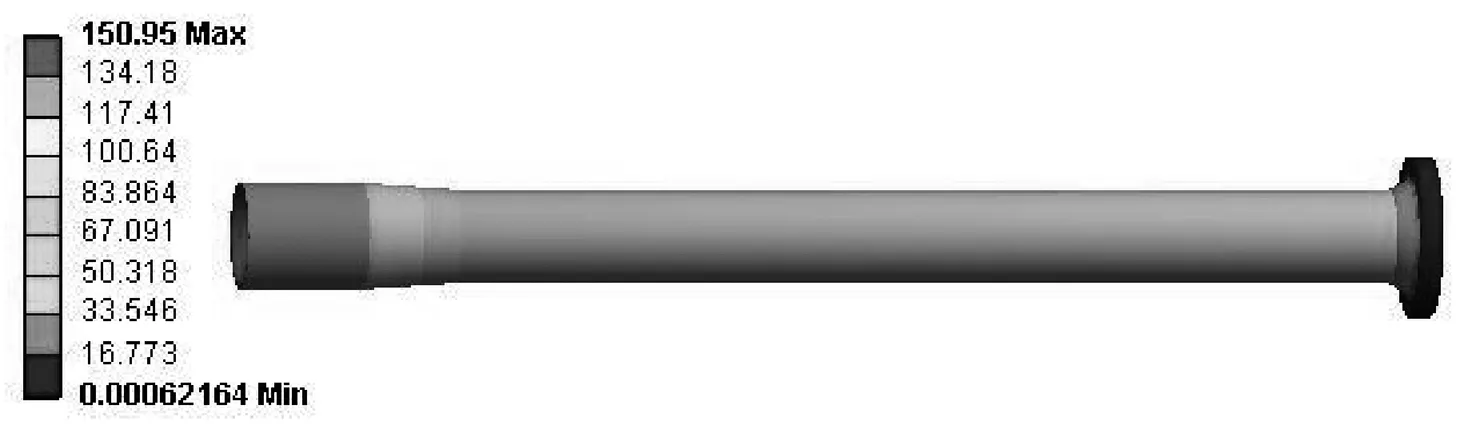
图14 发球筒应力云图
由图13可知,位移最大值为0.16 mm,在许用变形的范围之内。由图14可知,应力最大值为150.95 MPa,小于X70钢的许用应力。故发球筒满足强度要求。
3.4 连接单元卡箍
卡箍的功能是锁紧发球装置毂座与海底管汇毂座,为了保证其工作强度,进行强度校核。由于3个卡箍与毂座受力大小相同,以主动卡箍为例进行有限元分析。卡箍材料为35CrMo锻件[11],其弹性模量2.13×1011Pa,密度7.87×103kg/m3,泊松比0.286,许用应力556.0 MPa。采用四面体网格,施加载荷求解得到卡箍位移、应力云图如15~16。

图15 卡箍位移云图

图16 卡箍应力云图
由图15~16可知,卡箍最大位移为0.11 mm,在允许的范围内;最大应力为328.52 MPa,小于35CrMo的许用应力,卡箍强度满足设计要求。
4 结论
1) 与传统的发球装置不同,设计了一种适合单海管清管方式的水下发球装置。即从水下发球,由生产流体驱动清管器经过待清理海底管道和立管,回到平台收球筒中,可以有效避免传统清管方式的高成本和停输问题。
2) 通过有限元法对发球装置中快开盲板的头盖、发球单元的旁通阻隔机构、发球筒以及连接单元的卡箍进行了强度校核,校核结果表明,满足设计要求。
3) 本文的研究成果对国内单海管清管发球装置的设计提供了一些思路,同时对单海管清管技术的应用具有一定的指导作用。
猜你喜欢
油气田地面工程(2021年4期)2021-04-29 09:37:24
中国海上油气(2020年5期)2020-10-20 09:28:44
设备管理与维修(2020年11期)2020-06-15 02:39:18
中国特种设备安全(2019年4期)2019-05-20 09:55:54
石油石化节能(2019年3期)2019-04-03 12:17:08
中国化工贸易·上旬刊(2018年9期)2018-09-10 07:22:44
中国医学装备(2016年6期)2016-12-01 06:44:33
设备管理与维修(2015年2期)2015-12-25 01:49:28
化工管理(2014年29期)2014-08-15 00:51:32
石油化工应用(2014年11期)2014-03-11 17:40:37
