海洋核动力平台分散式集成自动化系统研究
2018-11-29 06:07王艳婷刘宙锋
船电技术 2018年11期
王艳婷,刘宙锋
海洋核动力平台分散式集成自动化系统研究
王艳婷,刘宙锋
(武汉第二船舶设计研究所,武汉 430064)
本文以海洋核动力平台的高自动化控制要求为立足点,在满足安全性、可靠性、经济性的前提下,结合核电、船舶与海洋工程以及工业界等多个领域的控制理念,提供了一种与分区防火设计契合、分散式集成化的自动化系统设计方法。
海洋核动力平台 自动化系统 分散式集成化
0 引言
随着浮动堆技术的日益成熟和海上电力需求的不断增加,浮动核电站开始成为新型核电站的发展方向,中船重工第七一九所等单位正在进行海洋核动力平台的设计工作。长远看来,浮动核电站具有广阔的民用市场应用前景,在未来的民用核电领域将占据极其重要的地位。[1,2]
由于海洋核动力平台远离陆地,相对核电站来说救援时效性较差,且由于空间较小,逃生较为困难,再者,海洋核动力平台相对普通民船来说,工作人员较多,因此在防火设计上较为苛刻。目前,海洋核动力平台的防火设计主要参考的是船级社对客船的分区要求及核电站相关规范的要求。[3]在苛刻的分区防火设计前提下,如何最大限度地保证海洋核动力平台的高自动化程度,是当前设计的一大难题。因此,设计一种既能适应分区防火设计要求,又能保证高自动化程度及其可靠性指标的控制方法是非常有必要的。
1 民船自动化系统设计
通常,民船在自动化设计中主要考虑的是安全性和经济性,因此在实际设计中会尽量满足可靠性和集中化的要求,以便降低设备的故障率及配置人员的数量。
1.1 通用系统的自动化设计原理
通用系统的自动化设计遵循自动化系统设计的设计理念,主要考虑的也是可靠性和集中化。以锅炉系统为例,主要分成以下三个层级,如图1所示。
1)就地控制级。位于锅炉上的传感器将信号发送至就地控制箱,位于锅炉附近的就地控制箱在接收到传感器信号后自动或者手动控制位于锅炉本地的泵、阀等设备,并同时接受泵、阀等设备的状态信息。

图1 锅炉系统自动化设计框图
2)机舱集控室集中控制级。就地控制箱将收集到的信号发送至位于机舱集控室的集中控制器,位于机舱集控室的集中控制器可以通过与就地控制箱的连接遥控位于锅炉本地的泵、阀等设备。
3)驾驶室集中控制级。机舱集控室的集中控制器将收集到的信号发送至位于驾驶室的集中控制器,位于驾驶室的集中控制器可以通过与机舱集控室集中控制级的连接遥控位于锅炉本地的泵、阀等设备。
从以上设计原理可以得知,位于上一层控制的设备或系统故障不会影响下一层设备或系统的操作,从而保障了系统的安全性[5]。而位于上层的设备或系统能够集中化地监视和操作,从而减少了人员的配置,提高了经济性。
需要注意的是,并非每个通用系统均独立配置机舱集控室集中控制级或者驾驶室独立控制级的控制器,但就地控制器是独立配置的。
1.2 自动化系统设计原理
由于民船通用系统非常多,因此如果每个通用系统均独立配置机舱集控室集中控制级或者驾驶室独立控制级的控制器,必然会带来以下几个问题:
1)成本的增加。大量集中控制器的配置必然会带来成本的增加。
2)集中控制站的控制难度增加。大量集中控制器的配置导致操作人员需要关注的信息量增多,从而增加了控制难度,继而带来人员配置的增加。
3)集中控制站占有空间增加。大量集中控制器的配置势必占据较多空间。
因此,出于经济性的考虑,民船在自动化设计时会将多数通用系统的集中控制需求整合,独立形成一套自动化系统,如图2所示。
根据图2可以看出,信号采集箱,集中控制器组成自动化系统,多个通用系统的就地控制箱通过信号采集箱与集中控制器进行连接,集中控制器将多个通用系统的信号集成。这样,通过集中控制器就可以通过自动化系统对多个通用系统进行控制了。
与通用系统相同,位于上一层控制的设备或系统故障不会影响下一层设备或系统的操作。因此,自动化系统的故障并不会影响各通用系统本地控制功能的失效,从而保障了系统的安全性。而位于顶层的自动化系统能够集中化的监视和操作,从而减少了人员的配置,提高了经济性。
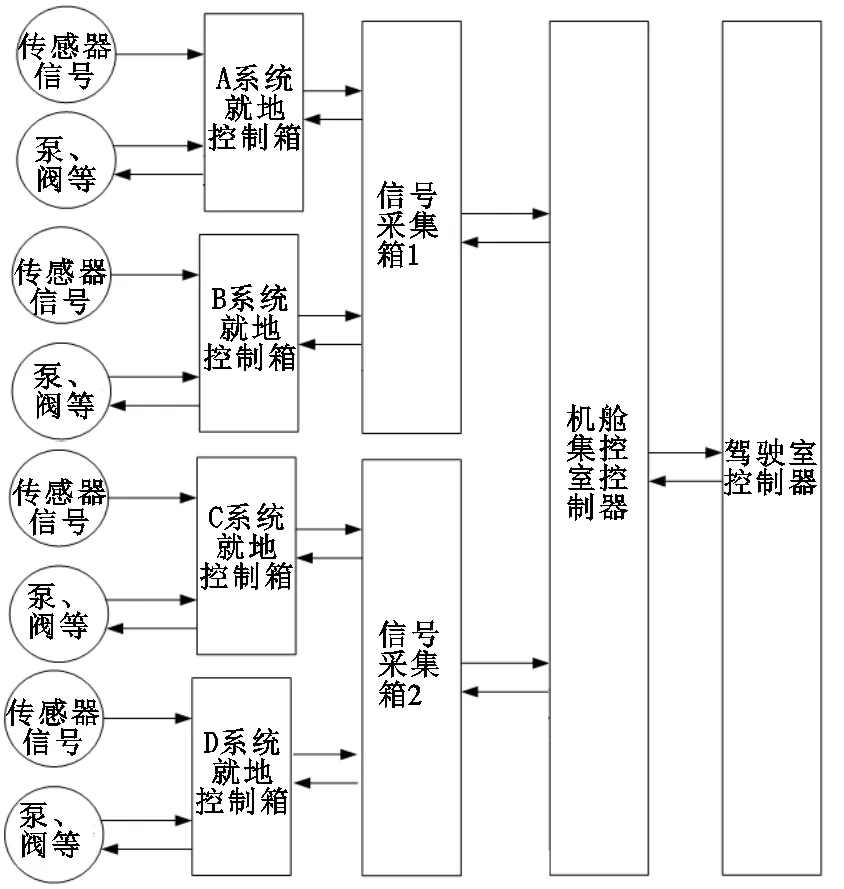
图2 自动化系统设计框图
图3 海洋核动力平台自动化系统设计框图
2 海洋核动力平台自动化系统设计
相对于一般民船,海洋核动力平台具有设备数量多、系统复杂的特点,而且由于反应堆的布置,将平台分隔成多个独立区域,传统意义上的机舱也被分隔在多处。因此,应用与普通民船的自动化系统设计已经无法满足海洋核动力平台的控制要求。
为保证海洋核动力平台的安全性和经济性,提供了一种分散式集成化的自动化控制方法,如图3所示。
根据图3可以看出,海洋核动力平台自动化系统分为以下三个层级。
1)就地控制级。各通用系统将传感器信号发送区域信号处理中心,信号处理中心可以通过与泵、阀的连接进行自动控制。操作人员也可以操作就地控制模块,就地控制模块可以通过与信号处理中心的连接进行手动控制。
2)区域集中控制级。区域集中控制器可以通过与信号处理中心的连接进行自动或手动控制。
3)中央控制级。位于总控室的集中控制器可以通过与区域集中控制器的连接进行自动或手动控制。
与民船自动化系统设计相同,位于上一层控制的系统故障不会影响下一层系统的操作。因此,上级集中控制器的故障不会导致就地控制功能的丧失,从而保障了系统的安全性。而位于顶层的自动化系统能够集中化地监视和操作,从而减少了人员的配置,提高了经济性。
信号处理中心作为通用系统内部连接以及远程-本地之间连接的枢纽,其安全可靠性要求非常高。因此,在其内部设置了双冗余处理系统,避免因其失效而导致通用系统失效。
同时,由于核电对于远程控制的可靠性要求较高[5],为了保证远程控制的可靠性,在信号处理中
心与区域集中控制器、区域集中控制器与总控室集中控制器之间也设置了双冗余通道。在顶层的总控室集中控制上,设置了两个总控室,不仅在通道上,还在空间上也设置了双冗余,极大地提升了自动化系统的可靠性。
3 结束语
海洋核动力平台的自动化系统设计是海洋核动力平台安全可靠运行的重要保障,本文提供了一种分散式集成化的自动化系统设计方法,为海洋核动力平台自动化系统设计提供了参考。
[1] 赵洪冉, 赵智萍. 核动力在民用船舶上的应用[J]. 中国核电, 2014, (9).
[2] 张力, 刘宙锋等. 海洋核动力平台电力系统设计概要[J], 船电技术, 2017, 37(11).
[3] 中国船级社, 钢制海船入级规范[S]. 北京: 中国船级社, 2014.
[4] 国际海事组织. 国际海上人命安全公约[S]. 北京: 人民交通出版社, 2009.
[5] 中国国家标准化委员会. GB/T 13626-2008 单一故障准则应用于核电厂安全系统[S]. 北京: 中国标准出版社, 2008.
Research of Distributed-Integration Automatic System for Offshore Nuclear Power Platform
Wang Yanting, Liu Zhoufeng
(Wuhan Second Ship Design and Research Institute, Wuhan 430064,China)
TM711
A
1003-4862(2018)11-0030-02
2018-10-18
王艳婷(1986-),女,工程师。研究方向:电气工程及其自动化。E-mail:wangyanting2007@163.com
猜你喜欢
神剑(2021年3期)2021-08-14
能源(2018年7期)2018-09-21
能源(2018年6期)2018-08-01
能源(2018年5期)2018-06-15
小哥白尼(军事科学)(2018年1期)2018-05-25
能源(2017年8期)2017-10-18
山东工业技术(2016年24期)2017-01-12
船海工程(2015年4期)2016-01-05
太空探索(2015年10期)2015-07-18
铁路通信信号工程技术(2014年1期)2014-02-28