
自动武器射击频率测试技术研究
2018-11-28 09:05晓龙
计算机测量与控制 2018年11期
,, ,晓龙,
(1.中国人民解放军海军航空装备计量维修中心,上海 200436; 2.北京航天测控技术有限公司,北京 100041)
0 引言
武器射击频率通常是指一分钟内连续射击的弹丸数目,是自动武器动态参数测试的重要项目之一,同时也是自动武器性能检测的重要指标[1],自动武器的射击精度与之密切相关,通过协调射击频率与武器固有频率的关系可以减小枪口震动,提高射击精度[2]。
目前用于自动武器射击频率测试的方法主要有检测后座力法、声电传感器法、激光光幕法以及枪口火焰图像识别法等。检测后座力法需要将武器安装到专用工作台上,在其后座上安装力传感器,通过处理后座力曲线得出测量结果,该方法是一种接触式测量方法,操作不便;声电传感器法利用压电陶瓷片作为敏感器件,利用控制单元通过脉冲整形、展宽、程序存储等完成对射击的计数和计时[3],该方法属于非接触式测量,但测试精度不高;激光光幕法利用光电检测的原理对弹丸经过光幕时的信号进行捕捉,是一种非接触式的测量方法,具有抗干扰能力强、灵敏度高等优点,但无法对无弹头射击进行测试;枪口火焰图像识别法采用高速录像方式对武器射击时枪口火焰有规律的变化进行实时检测,通过复杂的图像特征提取将其转换为射击频率,该方法在亮度较高的环境下测试容易引入背景噪声,影响测试精度。以上测试方法各具特点,但又略带不足。本文提出了一种基于高速摄影技术的武器射击频率测试方法,利用高速相机、半导体激光器、原向反射屏等搭建测试环境,通过对运动反射光斑的快速捕捉、光斑特征提取来获取武器自动机位移-时间信息,在准确获取射击频率的同时还可以进一步定性分析武器性能的好坏。
1 测试原理
测试系统由待测目标、高速相机、采集卡、原向发射屏、一字线形半导体激光器以及相应处理软件组成,其测试原理示意图如图1所示。半导体激光器安装在高速相机镜头的正下方,出射激光通过相机镜头前方的窄条反射镜面水平投射到武器自动机的运动平面上,保证覆盖原向反射屏整个运动行程;自动机上粘贴原向反射屏[4],会随着自动机做同步往复运动,用于将投射来的激光原向反射;原向反射屏反射光斑的整个运动行程由高速相机实时捕捉,通过高速数据线缆传送至计算机,最终利用matlab进行图像处理获得位移-时间曲线,从而获得射击频率。

图1 测试原理图
由于高速相机的采集频率高达数千乃至上万幅率,即每帧图像的曝光时间达到微秒级别,实际采集到的高速图像仅为一个个由原向反射屏反射回来的光斑,如图2所示。粘贴在自动机上的原向反射屏应尽量细小,保证射击过程中原向反射屏的整个运动行程都不会脱离激光的照射范围,同时便于光斑的特征信息提取。

图2 武器自动机运动图像序列
2 测试系统硬件
2.1 待测对象
待测对象为模拟某型号五连发自动步枪,其自动机运动行程小于500 mm,射击频率不超过500发/分钟。
2.2 高速相机与采集卡
针对实际测试需要选择由德国Mikrotron公司生产的MC1362高速相机,该高速相机被广泛应用于工业和汽车行业,具有低功耗、高速、高分辨率、等优点,采用CMOS图像传感器,像素尺寸14 μm*14 μm,有效像元面积19.92 mm*14.34 mm,通过外触发方式工作(TTL脉冲上升沿/下降沿可设置),满像素拍摄幅率为500 fps,幅率可随所设置拍摄图像的分辨率的减少而增大,最高可达120 kfps,曝光时间最短可设置为2 μs,充分保证武器自动机运动图像采集过程中不出现“拖尾”现象。实际测试过程中图像分辨率设置为1 280*32,拍摄幅率5 kfps,采集深度5 500帧。
作为图像采集与图像处理单元的接口,图像采集卡的主要功能是完成对高速相机的各种控制,包括高速相机的类型选择、成像像素的起始位置设定、触发方式的配置、触发信号的类型选择、触发响应时间的设置以及图像序列缓存空间大小的设置等工作。高速相机的像素深度为8bit,根据计算,在满像素拍摄幅率工作模式下单帧图像所需存储空间大小为:
因此,采用500帧/秒的最高拍摄幅率工作时每秒钟传输数据大小为1.25×500=625 MB,即最高拍摄幅率下所需传输数据带宽为625 MB/s。为了保证采集的图像信息准确无丢失的传输给数据处理单元,选用Dalsa公司生产的型号为X64 Xcelera-CL PX4 Full的图像采集卡,基于x4以上信道的PCIExpress总线接口,可配置BASE、Medium以及Full的Camera Link高速相机,并且支持多种类型的多通道面阵彩色或单色相机以及多通道线阵扫描的彩色或单色相机,数据带宽能够高达1 GB/s。
MC1362高速相机自带与之配套的专用控制软件,通过安装该控制软件后便可通过计算机方便的设置高速相机的各项参数,如高速相机的拍摄幅率、像素大小、曝光时间等,使其满足实际测试需求。高速相机专用控制软件安装完成后还需要安装Sapera LT软件库以及图像采集卡X64 Xcelera-CL PX4 Full驱动,Sapera LT软件库是一套用于图像的采集、控制以及显示的独立于硬件以外的C/C++软件库,支持所有的DALSA Coreco硬件平台。
2.3 相机镜头
高速相机以及图像采集卡确定后还需选择合适的相机镜头,镜头参数的选择以及质量的好坏关系到反射光斑的成像质量,相机镜头的选择可重点考虑如下几个方面。
1)镜头接口:由于MC1362高速相机的接口类型是F口,相机镜头的接口选择主要根据高速相机的接口类型确定,所以也应选择F接口的镜头;
2)镜头的像面尺寸:MC1362高速相机图像传感器的对角线长度为22.9 mm,相机镜头的像面尺寸在选型时必须大于相机光敏面的尺寸,故可选择规格为1英寸(23.4 mm)的镜头;
3)镜头的焦距和视场:可以根据实际测试环境中高速相机与待测目标的实际距离以及待测自动机运动行程(相机视场范围)来选择参数合适的镜头,为了保证相机镜头的视场完全覆盖自动机的整个运动行程,即相机镜头的视角须符合要求。由于待测自动机运动行程最高500 mm,测试垂直距离1.2 m,计算可得相机镜头视角应大于24°。
选用腾龙的型号为AF28-105 mm的光学镜头进行测试,尼康AF卡口,最大光圈F4-3.6,最小光圈F22,最近对焦范围0.5 m,焦距范围28~105 mm,滤镜直径62 mm,视角范围24°~75°。
2.4 半导体激光器
光在光学系统中传播时反射镜面对光的透射、传播介质对光的吸收等都会造成能量的损失,为保证在高拍摄幅率条件下高速相机仍然可以采集到清晰的光斑图像,光源的选取是一个关键因素,其参数选择是否合理直接影响到系统测试的准确度乃至测试的成败,光源选取应遵循如下原则:性能可靠、体积小、供电电压低、易于集成、输出功率稳定等。
半导体激光器因体积小、供电功率小、转换效率高、可靠性强等优点已在许多领域得到广泛使用,这里选用发射功率15 mw、扇角60°、波长650 nm的红光一字线形半导体激光器。主要由半导体激光二极管、恒流驱动电路、聚焦准直光学系统、柱面扩束光学系统、鲍威尔棱镜、直流稳压电源、外套固件、ATC/APC(自动温度控制、自动功率控制)等部分组成。
2.5 原向反射屏
测试过程中高速相机需要对运动自动机反射回的光斑图像进行捕捉,要想获取反射效果好并且清晰的光斑图像,需要在自动机运动平面粘贴定向反射介质,定向反射介质的反射率越高越好。测试系统硬件选用玻璃微珠式原向反射屏进行测试光源反射,其结构示意图如图3所示。

图3 玻璃微珠原向反射屏结构示意图
微珠玻璃的制作工艺常为将熔融状态的玻璃喷成雾状微小颗粒,在液态时表面张力的作用下,通过喷咀气流速度的控制让其自行凝结为圆形球体,并附着在树脂层的压敏胶膜上,空气层的光学折射率n≈1,玻璃材料的光学折射率n’≈2,对光路起原向发射作用的便是玻璃微珠,平行光束照射到玻璃微珠球面体后将汇聚到球面体的后表面,经球面体后表面的反射作用,出射光将按入射光束的平行方向返回,为了增大玻璃微珠的反射特性,可在球面体的后表面堵上一层发射率高的薄膜。
微珠玻璃作为一种物美价廉的定向反射介质在光电测试领域得到了广泛应用。玻璃微珠原向反射屏小巧轻便,粘贴在待测运动目标上即可以实现定向反射的功能,不会对测试目标产生破坏,对被测目标的运动规律也不会产生任何影响,是辅助自动机运动图像采集的理想材料。
3 系统软件设计
3.1 高速相机的控制
高速相机以及图像采集卡的驱动和软件库安装完成之后,通过CamExpert软件来编辑实际测试过程中高速相机所需的配置文件,Camera Type设置高速相机类型为面阵,Color Type与Pixel Depth设置采集图像的属性为单色、8bit,像素编辑区用于配置水平方向以及垂直方向上的像素起始位置,也就是单帧图像的成像位置以及以及存储空间大小。
External Trigger用来设置高速相机外部触发工作方式,触发信号可以来自硬件触发或者软件触发,软件触发方式可以通过单击Trigger按钮来实现,External Trigger Detection用来设置外部触发信号的形式,有四种可供选择:逻辑高、逻辑低、上升沿和下降沿;External Trigger Level用来设置触发信号的类型,RS-422或者TTL;External Trigger Minimum Duration 用来设置外部触发的响应时间;External Trigger Sourse用来设置触发信号的来源;Frame Count per External Trigger用来设置每次触发到来时采集记录的总帧数。
配置文件编辑完成后打开SeqGrabDemo.exe进行图像采集。通过外触发的方式SeqGrabDemo.exe将采集的图像序列存储至指定路径,可进行运动图像数据的回放,每一帧运动图像均被存储在不同的缓冲区中,可通过对话框设置buffer从而改变所采集到的视频文件的大小。
3.2 视频-图像格式转换
高速相机采集到的光斑运动图像以.avi的视频格式进行存储,为了便于后期的光斑特征信息提取,首先需将其转换为图像序列格式。利用matlab设计存储格式转换的程序代码如下,其中X:为待转换视频文件的存储路径,size函数用于读取视频文件的图像帧数,str为待保存的图像序列命名,保存图像为.tif格式,imwrite函数用于将转换好的图像序列保存到Y:路径下。
mov=aviread(‘X: ame.avi’);
fnum=size(mov,2);
s=1;
e=fnum;
for i=s:e
frames=frame2im(mov(i));
str=strcat(‘b’,int2str(i),‘.tif’);
imwrite(frames,strcat('Y:’,str),'tif')
end
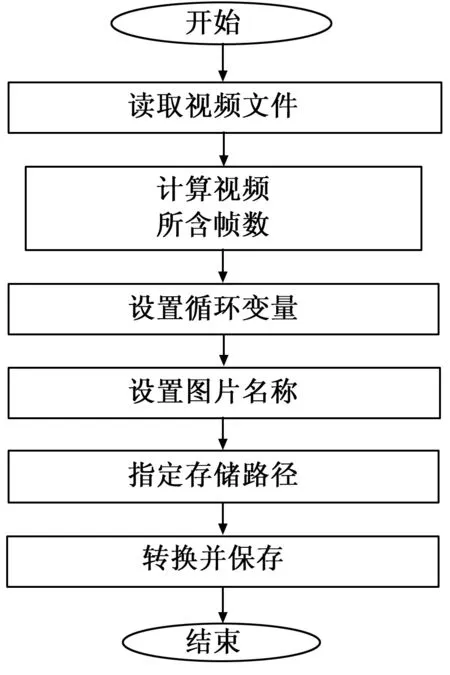
图4 存储格式转换的程序流程图
3.3 光斑定位
为了获取光斑运动位移-时间曲线,首先应确定光斑在图像中的具体位置。利用matlab中的imread函数读取一帧图像,截取光斑中心附近处灰度值分布数字矩阵如图5所示,矩阵中每个数值代表一个像素,其取值都在0~255之间,灰度值越大则表示该像素所代表的反射光斑的能量越大。灰度值大的区域即为反射光斑的位置,灰度值小的区域即为光斑的背景,由于光斑区域与背景区域在灰度数值上的差异较大,使得光斑位置提取相对简单。
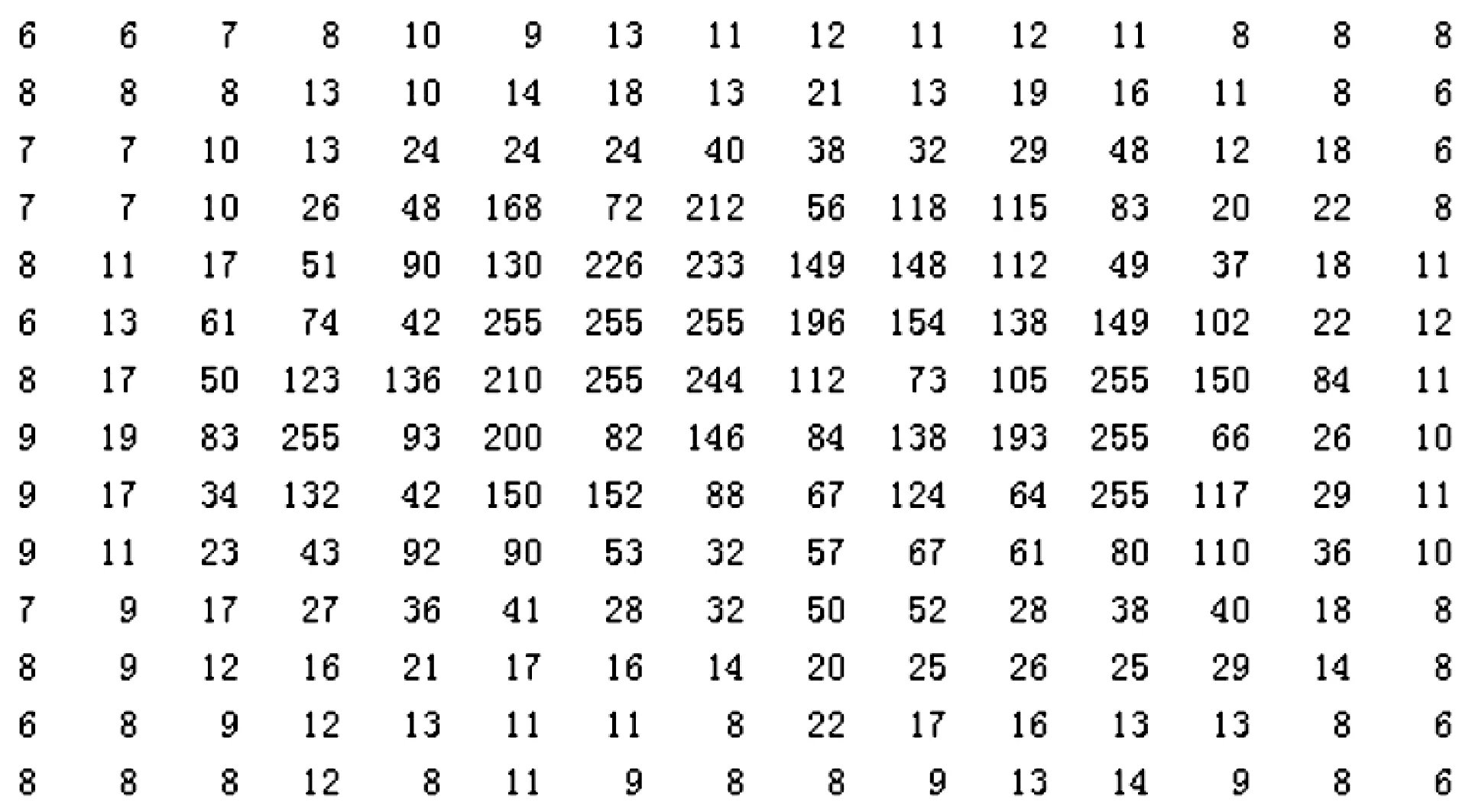
图5 图像光斑处灰度数字矩阵
根据矩阵的数值特点选用灰度重心算法提取光斑在图像中的具体位置,其基本原理是以灰度值作为权值,对矩阵进行积分运算获取重心。首先应根据测试特点设定灰度阈值,超过阈值则认为是光斑,对光斑处所有像素位置与灰度值进行积分运算,进而除以光斑处灰度值的和结果即为光斑重心,关系式如下所示。其中,I(i,j)代表光斑图像第i行第j列像素的灰度值,i0和j0代表光斑重心位置,S代表属于光斑的像素集合。
3.4 位移-时间曲线拟合
光斑准确定位之后需要将图像序列的光斑重心点位置与采集时间做拟合,实际测试的拍摄幅率是5 kfps,即图像序列中相邻光斑的时间间隔是200 μs。由于实际测试环境的恶劣和强烈的冲击等因素会引入随机干扰信号,这里用matlab中medfilt2函数进行中值滤波,然后用smooth函数进行9点运动平均平滑,最终利用plot函数绘制其运动的位移-时间曲线如图6所示,横坐标为光斑重心运动的时间,单位ms,纵坐标对应光斑重心所在像素的列数。
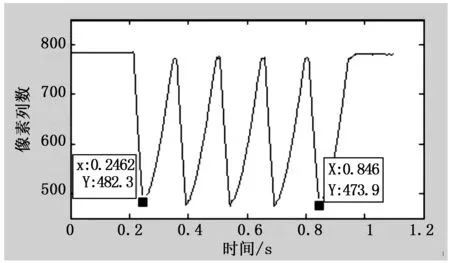
图6 光斑重心运动的位移-时间曲线
4 测试结果与分析
根据测得位移-时间曲线可知,光斑重心随武器自动机做五个周期的同步性运动,像素纵向列数最大值对应射击的起始时刻,像素纵向列数的最小值对应武器自动机运动的最大位移时刻,利用data cursor标注曲线中第一发和第五发射击时光斑运动的最大位移点,如图6所示,两点的横坐标分别为0.246 2和0.846,即第一发和第五发射击的时间间隔为0.599 8 s,由此可计算武器射击频率为400发/分钟,与设置标称频率相符。
后期如果对位移-时间曲线做进一步微分运算,还可得出光斑运动的速度-时间曲线,从而定性分析武器射击的能量是否均匀、震动规律是否合理以及自动机运动有无故障等武器性能的好坏。
5 结论
本文提出了利用高速摄影技术测试自动武器射击频率的方法。该方法利用武器射击过程中自动机运动频率与其射击频率一致的特点,利用一字线形半导体激光器作为测试光源通过镜头正前方的窄条反射镜面投射到自动机运动平面上,利用高速相机对原向反射屏反射回来的光斑运动图像进行捕捉,通过matlab处理获得其运动的位移-时间曲线,依此计算射击频率。通过对自动枪械模拟器五连发实际测试,验证了测试方法的可行性。
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16
发明与创新(2021年39期)2021-11-05
小哥白尼(军事科学)(2021年6期)2021-11-02
延边大学学报(自然科学版)(2021年2期)2021-07-29
读者·校园版(2020年12期)2020-06-19
阅读(高年级)(2019年9期)2019-11-15
VOGUE服饰与美容(2019年8期)2019-11-12
软件学报(2019年12期)2019-10-26
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
