大型铁磁性物体近场磁异常场数值仿真
2018-11-28 01:54:18张梦颖王华葛霖程浩
北京航空航天大学学报 2018年11期
张梦颖, 王华, 葛霖, 程浩
(北京航空航天大学宇航学院, 北京 100083)
铁磁性物体在磁场中会发生磁化现象,对周围的磁场环境造成扰动,产生磁异常现象。磁异常探测(magnetic anomaly detection)是一种探测铁磁性物体十分有效的方法,相比其他探测方式(比如雷达、声呐和红外等),磁异常探测方法不仅可以对目标进行无源探测,而且对于一些视觉不可见的目标也能进行探测,比如水下沉船、矿产资源和管道缺陷等[1]。
从磁异常探测方法来看,目前磁探测测量信息主要分2种:磁场模量信息和磁场矢量信息。磁场模量信息,又包括模量大小信息、模量异常信息、模量梯度信息及模量异常梯度信息。模量大小和模量异常信息的测量简单,受磁化方向影响小,且不受传感器空间姿态影响,但是往往会丢失很多磁场信息,比如磁场方向,导致后期数据解释的深度有限,对于一些复杂的磁场情况往往达不到预期效果。Zhang等提出基于磁异常模量和磁异常矢量的自动路径搜索算法对比得到基于磁异常矢量信息的算法在搜索路径长度和精度方面都优于基于磁异常模量的算法[2]。Ege等通过研究磁场模量大小的变化特征,能够识别沿不同方向运动的铁磁性目标[3];李泽林等提出了一种数据空间磁异常模量反演算法来减少剩磁影响,并且计算时间更少、结果更加聚焦[4]。模量梯度信息和模量异常梯度信息的测量是将多个标量磁传感器组成一定阵列进行梯度测量,是模量信息和模量异常信息的发展和拓展,能够反映更多的磁场信息。Zalevsky等提出了一种基于小波变换的高精度自动探测算法,通过测线上的磁场模量梯度信息实现自动探测,并且能区分相邻目标[5];张恒磊等提出了一种基于磁异常垂向二阶导数的非参数快速反演方法,不仅可以获取场源的边界信息,同时还可以反演场源的埋深[6]。磁场矢量信息,又可以分为磁场矢量大小信息和磁场矢量梯度张量信息。磁场矢量信息测量是采用矢量磁传感器测量3个互相垂直的磁场分量,因此包含的磁场信息更加丰富,但其受测量姿态影响较大,对测量装置的要求十分严格。Gadre等提出了2种水下磁异常自动定位算法,利用磁偶极子在空间的磁场矢量信息实现了单个偶极子和多个偶极子的定位[7];Sheinker等将矢量磁传感器信号分解为一组正交基函数,获得了铁磁性目标的磁异常规律[8];Liu等提出了一种新的识别铁磁性目标运动方向的方法,通过测量磁场2个方向分量信息建立合成信号图,实现目标运动识别,并且不受目标磁矩大小和方向的影响[9]。磁场矢量梯度张量信息是测量磁场3个分量分别在空间3个方向上的变化率,具有信息量大、抗干扰能力强的特点,但同样对测量姿态要求很高。Nara等利用磁场矢量信息和矢量梯度张量信息实现了磁偶极子的定位,并解决了传统欧拉方程定位磁偶极子时,在奇异点无法求解的问题[10-11];Beiki等提出利用磁场模量梯度张量计算归一化磁源强度来估计目标位置的方法[12];张恒磊等提出了基于磁力梯度张量模的各向异性边界探测方法,可以对未知磁化方向的斜磁化磁场进行边界探测[13]。从国内外众多学者的研究可以看出,磁异常的模量信息和矢量信息已经在磁法勘探、目标探测定位,目标运动方向确定等方面有了许多的研究和应用,但是对于目标在不同地磁条件下,详细的空间磁异常场分布规律还有待研究。
从探测目标距离来看,目前对于铁磁性物体的探测研究主要为远场探测,即探测目标尺寸相对于探测距离可以忽略,此时可以将目标等效为磁偶极子来处理,当被探测目标尺寸相对于探测距离不能忽略时,磁偶极子的模型将不再适用。目前针对铁磁性物质近场磁场的研究相对比较少,特别是对于整个空间磁异常场分布规律的研究,这方面的工作对于研究大型铁磁性物体周围的磁场特性是十分必要的。本文针对这个问题,仿真并验证了长方体铁磁性物体近场三维空间磁异常场的模量场和矢量场分布规律,为目标近场的磁异常探测提供了研究和分析基础。
1 磁异常场建模理论
关于磁介质的磁化理论主要有2种不同的观点:分子电流观点和磁荷观点。从现代关于原子结构的认识来看,分子电流观点更加符合微观本质。对于远场铁磁性目标的磁探测通常采用磁偶极子模型,一般将目标等效为给定电流分布所激发的磁场矢势,再通过推导可得出磁偶极子数学模型(见式(1)),式(1)也是远场磁探测最重要的理论基础[14]。
(1)
式中:B为磁偶极子在测量点P处的磁感应强度;r为测量点到磁源的距离矢量;μ0为真空导磁率,m(mx,my,mz)为磁偶极子的三维磁矩矢量。
对于近场铁磁性物体的探测,由于其自身尺寸相对于探测距离不能被忽略,故式(1)给出的磁偶极子模型将不再适用。假设长方体铁磁性物体尺寸为a×b×h,位置如图1所示,沿Z方向上对其均匀磁化。由安培分子环流假设知:磁体外部空间中任一点的磁场由磁体侧表面闭合电流环路所激发。设环路上面磁化电流密度为Js(单位为A/m),Js与磁化强度矢量M的关系为
Js=M×n
(2)
式中:n为磁介质表面外法线单位矢量。
设铁磁体外P点的矢量坐标为r(x,y,z),选取厚度为dz的薄层电流环A′B′C′D′A′,则其电流强度为I=Jsdz。以A′B′段为例,A′B′上某微元dl的空间矢量坐标为r′(x′,y′,z′)在该点产生的磁感应强度为
(3)
写成分量形式为

(4)
dBA′B′y=0
(5)
(6)

图1 长方体铁磁性物体磁化的分子环流模型Fig.1 Molecular current model of cuboid magnetized ferromagnetic objects
同理可以得到B′C′段、C′D′段、D′A′段在测试点P处产生的磁感应强度,矢量叠加以后可以得到薄层电流环A′B′C′D′A′在测试点P产生总磁场强度为
dBA′B′C′D′A′=dBA′B′+dBB′C′+dBC′D′+dBA′D′A′
(7)
则总电流环在P点产生的总磁场为
(8)
利用式(2)~式(8),最终可以得到沿Z方向磁化的铁磁性物体外部空间的三维磁化磁场模型[15]。
2 地磁背景下铁磁物质磁异常场建模仿真
地磁场是地球的固有特性和固有资源之一,它分布在地球周围,为航空、航天、航海提供了天然的坐标系,可应用于航天器或舰船的定位定向及姿态控制。地磁场在全球范围内的分布并不是均匀、不变的,而是有特定的分布规律,但是在一个较小的区域内,地磁场正常梯度值很小,可以看作是均匀场。地磁场总强度值位于0.4~0.6 Gs之间,平均0.5 Gs[16](1 T=104Gs)。
铁磁性物体在地磁场Bd的作用下,会产生感应磁场Bg,加上铁磁物体本身带有的剩余磁场Bs,两者构成了铁磁物体的磁场,而这个磁场再与地磁场叠加就构成了直接测量到的总磁场Ba(或称磁异常场)。
Ba=Bd+Bg+Bs
(9)
本文利用ANSYS Maxwell,在均匀地磁场中建立了大型长方体铁磁性物体模型,对其近场的磁异常场进行数值仿真分析。本文研究的铁磁物质为软磁材料,矫顽力很小(一般小于1 A/m),所以仿真时可以忽略剩余磁场Bs的影响。仿真数值求解区域为边长1 000 m的立方体空间,铁磁性长方体尺寸为300 m×70 m×70 m,材料选择steel,磁矫顽力设为0 A/m,位于空间几何中心,仿真材料的B-H磁化曲线如图2所示,H为磁场强度,B为磁感应强度模值,仿真模型如图3所示。

图2 仿真材料的B-H磁化曲线Fig.2 B-H magnetization curve of simulation materials

图3 仿真模型以及分析平面示意图Fig.3 Schematic of simulation model and analysis planes
模型的地磁场边界条件为均匀磁场,强度为0.5 Gs。为了考虑地磁倾角E和地磁偏角θ的影响,定义平行于XOY平面地磁倾角为0,平行于YOZ平面地磁偏角均为0。在此基础上,对地磁倾角E为0°和45°时,地磁偏角θ等于0°、45°和90°的6种情况进行讨论,然后提取各种条件下不同平面上的仿真结果,分析其磁场模量和矢量信息。
本文主要分析平行于XOY,XOZ,YOZ平面且不与长方体相交的三组平面族上的磁感应强度,其中选择3个基准平面分别为Z=600 m,Y=700 m,X=400 m,后期通过仿真结果分析发现,3个基准平面代表了各自平面族的分布规律,因此后面的分析将以这3个平面上的数据作为基础。
3 模型空间磁异常场分析
3.1 地磁倾角E=0°时磁异常场分布
当地磁场矢量水平分量与模型长度方向夹角θ=0°时,3个基准平面上的磁感应强度大小如图4所示,图的竖直坐标轴代表磁感应强度的模量大小,颜色深浅也代表其值的大小,水平坐标轴代表基准平面的正交坐标值。可以看出3个平面族上的磁感应强度大小分布都是规律的对称分布图形,其中平行于XOY和YOZ的平面族上的磁感应强度分布都为双峰单谷的分布规律,并且在长方体长向两端附近出现峰值,在长向中心位置出现谷值;而平行于XOZ的平面族上的磁感应强度分布为单峰的分布规律,在长方体长向端的中心位置达到峰值。

图4 地磁场条件为E=0°,θ=0°时磁感应 强度模量大小分布Fig.4 Magnitude distribution of magnetic induction intensity under geomagnetic condition of E=0° and θ=0°
3个基准平面上的磁感应强度矢量图分布如图5所示。结合3个平面矢量图可以看出,铁磁性物质对于磁场有“聚集”的作用,磁感线在长方体长向一端向端面中心偏转明显,并且在中部区域磁感线恢复水平,最后在长向另一端向四周发散。
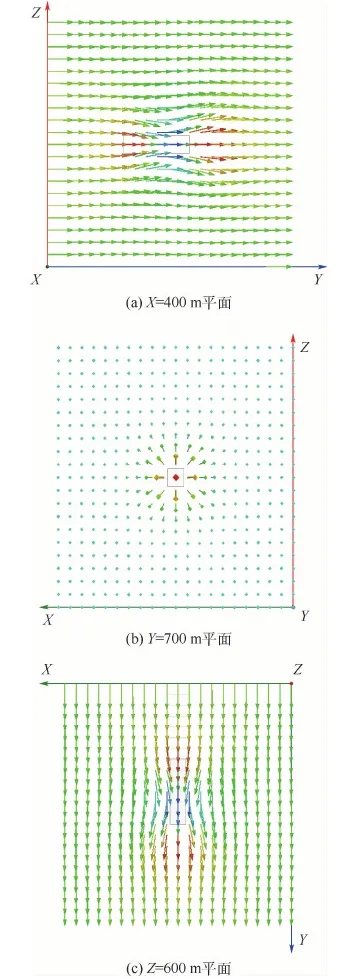
图5 地磁场条件为E=0°,θ=0°时磁感应 强度矢量分布Fig.5 Vector distribution of magnetic induction intensity under geomagnetic condition of E=0° and θ=0°
当地磁场矢量水平分量与模型长度方向夹角θ=45°时,3个基准平面上的磁感应强度大小如图6所示。可以看出XOY平面族上的磁感应强度大小为双峰单谷,并且相对于0°时转动了一个角度,通过分析发现转动的角度与长方体的尺寸以及分析平面的高度有关;YOZ平面族上的分布变成了单峰单谷的规律,峰值和谷值出现在长方体的长向两端位置附近;XOZ平面族上的分布为单峰分布,但是“峰”的形状发生了变形。结合3个平面分析可知,在长方体一端左侧以及另一端右侧区域磁感应强度出现峰值,在中间区域出现谷值。
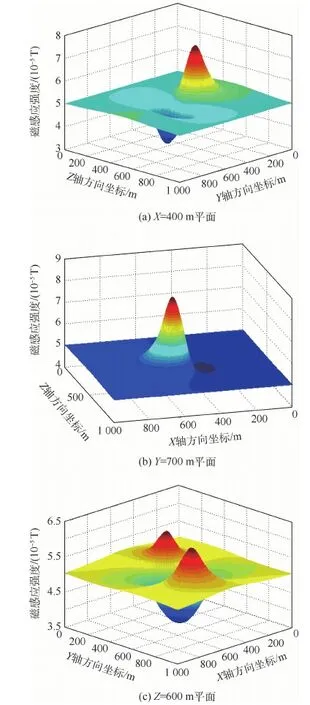
图6 地磁场条件为E=0°,θ=45°时磁感应 强度模量大小分布Fig.6 Magnitude distribution of magnetic induction intensity under geomagnetic condition of E=0°and θ=45°
同样地,3个基准平面上的磁感应强度矢量图分布如图7所示。可以看出磁感线聚集的两个端点位置在水平面内(XOY平面)发生了偏转,即聚集区域出现在了长发体一端的左侧和另一端的右侧。
当地磁场矢量水平分量与模型长度方向夹角为90°时,磁异常场分布规律和地磁场方向为0°时十分相似。磁感应强度标量分布规律相当于将0°的空间磁场分布绕竖直中心轴转动了90°,但由于长方体长宽尺寸的不同,峰值和谷值的幅度和范围会有所变化。同样的,磁感应强度矢量场相当于0°时的矢量场分布规律转动了90°,但是矢量的幅值大小以及范围会有所变化。

图7 地磁场条件为E=0°, θ=45°时磁感应 强度矢量分布Fig.7 Vector distribution of magnetic induction intensity under geomagnetic condition of E=0°and θ=45°
3.2 地磁倾角E=45°时磁异常场分布
当地磁场矢量水平分量与模型长度方向夹角θ=0°时,3个基准平面上的磁感应强度大小如图8所示。可以看出XOY平面族上的磁感应强度大小变为单峰单谷;YOZ平面族上的分布变成了双峰单谷的规律,峰值出现在长方体的长向两端附近的上下区域,谷值出现在长方体中心位置;XOZ平面族上的分布为单峰分布。结合3个平面分析可知,在长方体一端上方以及另一端下方区域磁感应强度出现峰值,在中间区域出现谷值。

图8 地磁场条件为E=45°,θ=0°时磁感应 强度模量大小分布Fig.8 Magnitude distribution of magnetic induction intensity under geomagnetic condition of E=45°and θ=0°
此时3个基准平面上的磁感应强度矢量图分布如图9所示。结合3个平面分析可知,可以看出磁感线聚集的两个端点位置在竖直平面内(YOZ平面)发生了偏转,即聚集区域出现在了长发体一端的上方和另一端的下方。
对于地磁场矢量水平分量与模型长度方向夹角为45°和90°两种情况,其分布规律和0°的情况类似,磁感应强度模量的峰值和谷值的位置发生了转动和变化,转动角度和偏移距离的大小与长方体的尺寸、平面位置有关,这里不再逐一详细分析。
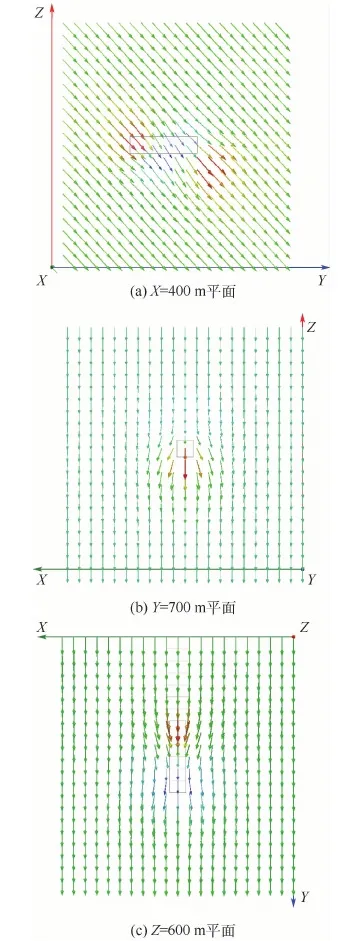
图9 地磁场条件为E=45°,θ=0°时磁感应强度 矢量分布Fig.9 Vector distribution of magnetic induction intensity under geomagnetic condition of E=45°and θ=0°
4 缩比验证试验
为了验证数值仿真得到的分布规律的正确性,进行了1∶1 000的缩比试验。图10是验证试验所用设备和模型,主要包括:试验平台(具有调节测量空间位置的滑块机构)、长方体铁磁物质(钢制块,尺寸70 mm×70 mm×300 mm)、三轴磁阻传感器、笔记本电脑。为了模拟均匀的地磁场环境,试验选择在空旷的郊区进行,并且为了避免试验设备对磁场的干扰,试验平台采用非铁磁性的铝件加工而成。
实际环境中每个地区的地磁场矢量是不同的,经测量当地的地磁场信息,磁感应模量大小约为0.51 Gs,地磁倾角约为67°,根据当地地磁场信息,进行试验测量。以地磁倾角67°,地磁场矢量水平分量与模型长度方向夹角0°的试验条件为例,测得距长方体上表面100 mm高度平面的磁感应强度模量场和矢量场分布规律如图11所示。试验测量了平面上63个点的磁感应强度矢量,测点均匀对称分布在长方体模型上方。可以看出,数据测得结果与类似地磁条件下的图8(c)和图9(c)的分布规律一致。同样地,在其他地磁场条件下都能得相同的结论,说明了仿真研究总结规律是正确的。

图10 室外缩比模型试验Fig.10 Outdoor test of shrinkage ratio model

图11 试验模型上方100 mm高度平面磁异常空间分布Fig.11 Spatial distribution of magnetic anomaly at 100 mm height plane above test model
5 结 论
通过对大型铁磁性物体在地磁场中近场的磁异常场的数值仿真分析,得到不同地磁场条件下磁异常模量场以及矢量场的分布规律;通过缩比试验,验证了仿真得到的分布规律的正确性。主要结论如下:
1) 铁磁性物体在地磁场中磁化规律主要与地磁场方向与物体之间的角度、物体的尺寸形状等有关。地磁偏角的变化会引起磁化两极在XOY水平平面内的转动;而由于地磁倾角的影响,导致了磁化两极在YOZ竖直平面内的转动;另外,铁磁性物体的磁化两极出现在地磁场方向与物体相交的端面位置附近,具体位置与物体几何尺寸有关。
2) 从磁感应强度模量场分布来看,在铁磁性物体磁化两极附近和两极连线中心区域,磁场出现的异常值最大;其中两极附近为正异常,连线中心区域为负异常;另外,异常值的幅度与距物体的距离有关,越靠近物体,磁异常值越大,而且异常值峰值的平面位置也会靠近物体移动。
3) 从磁感应强度矢量场分布来看,磁感线相对于铁磁性物体有明显的聚集作用。磁感线的走向一般为在物体磁化的一极先出现聚拢,再恢复与地磁场平行,最后发散。在靠近物体周围的磁感应矢量相对于地磁场磁场方向会有明显的角度变化,并且这个变化也具有规律性,可以通过空间内磁感应强度矢量B的分布规律加以识别。
至此,铁磁性物体近场空间的磁感应强度模量场和矢量场分布规律已经基本得到,后续还可根据研究需要对模量异常、模量梯度、模量异常梯度以及矢量梯度张量信息的分布规律进行进一步细化研究。利用这些分布规律,可以进一步与许多相关应用背景结合,如目标探测机制和探测路径研究、近场精确定位、磁异常场反演等。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:00
华北地震科学(2022年3期)2022-07-22 07:18:28
中学生数理化·自主招生(2022年11期)2022-05-30 00:07:26
中国测试(2021年4期)2021-07-16 07:48:54
山东交通科技(2020年1期)2020-07-24 08:28:58
山西建筑(2020年11期)2020-06-04 00:09:48
上海公路(2018年4期)2018-03-21 05:57:24
科技视界(2015年30期)2015-10-22 11:26:44
中国粮油学报(2014年8期)2014-02-06 01:34:24
浙江电力(2014年6期)2014-01-27 03:31:37