
吸附式制冷系统中槽式太阳能跟踪系统的设计*
2018-11-27 05:08曹凤梅张红光
机电工程 2018年11期
曹凤梅,张红光
(1.银川能源学院 机械与汽车工程学院,宁夏 银川 750105;2.宁夏伊品生物科技有限公司,宁夏 银川 750105)
0 引 言
太阳能制冷是近几年发展起来的一种新型太阳能利用技术。夏季,太阳能辐射量大,而同时也正处空调制冷需求高峰,使得太阳能应用在制冷技术领域在季节匹配性[1]上占据了极大优势,也使得利用太阳能以热制冷技术越来越多地受到重视和发展。目前太阳能制冷技术研究的热点是太阳能吸收式制冷、太阳能喷射式制冷和太阳能吸附式制冷。
对于吸附式制冷技术,国内外学者作了较多的研究,主要是在对制冷效率、集热装置设计、集热效率及制冷成本[2]。已经产业化的吸附式制冷技术主要应用在冰箱、小型制冷机和小型独立式建筑物空调[3],但在制冷效率、产品成本上与传统蒸汽压缩式制冷系统相比还不具备太大优势。太阳能吸附式制冷过程中,影响制冷系统成本和效率的3大环节是[4]:太阳能-热能、热能-吸附床、吸附床-传热。
针对太阳能-热能环节,笔者提出一种基于南北倾斜布置东西跟踪的单轴槽式太阳跟踪系统。
1 跟踪角度计算模型建立
本文提出的跟踪系统通过建立跟踪坐标系,求得集热装置跟踪太阳位置的运动方程,编程计算太阳运动轨迹,从而使跟踪系统能依靠实时数据跟随太阳角度的变化情况,驱动电机带动集热装置视太阳位置运动。
1.1 太阳入射光线
为了得到抛物槽式太阳能集热装置跟踪太阳的跟踪角度,本研究建立跟踪坐标系及与跟踪系统对应的运动控制方程。
太阳运动的几何学模型[5]如图1所示。
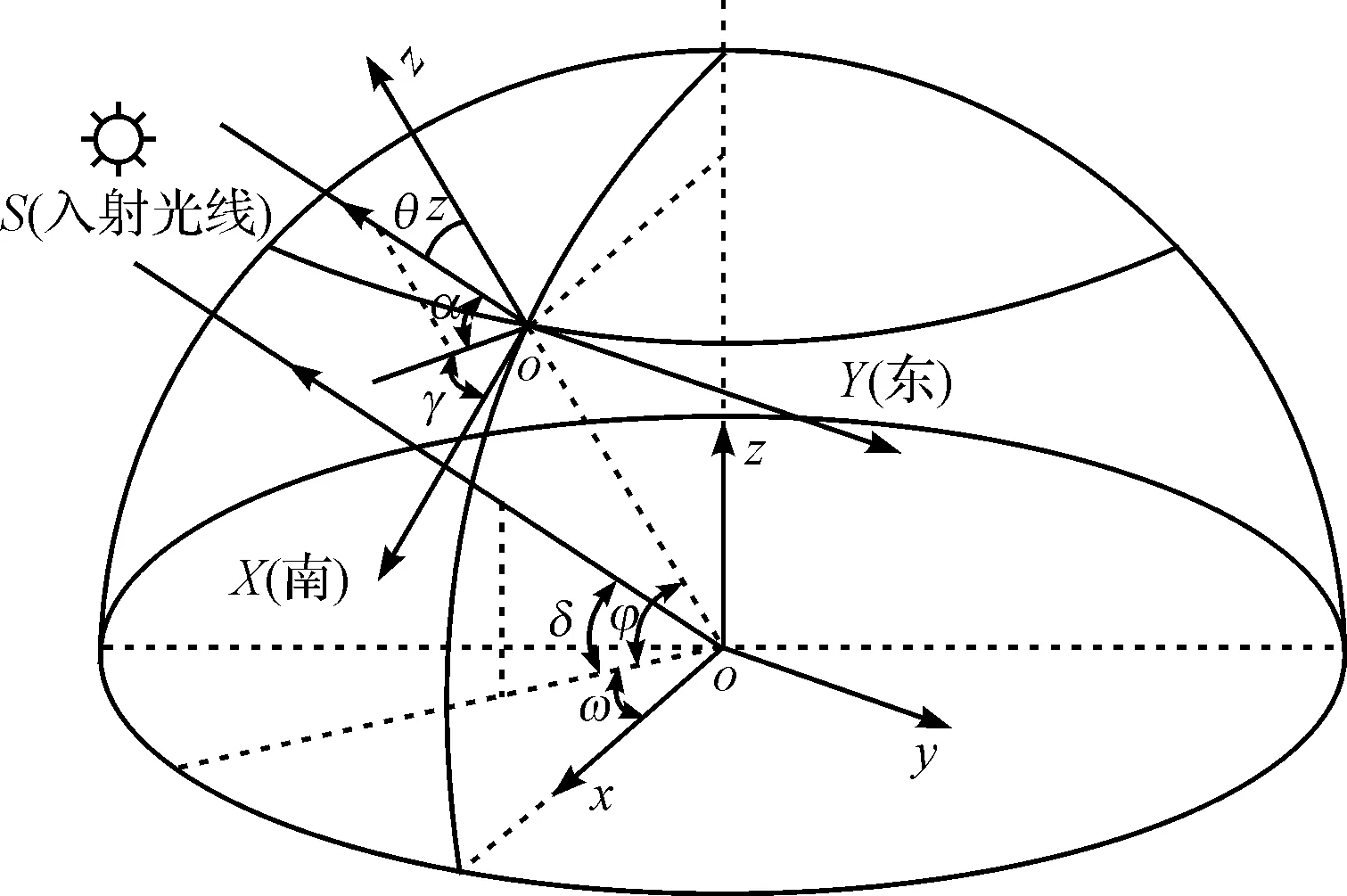
图1 太阳运动几何学模型α—高度角;γ—方位角;δ—赤纬角;ω—时角

(1)

(2)

(3)
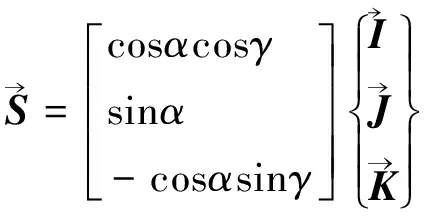
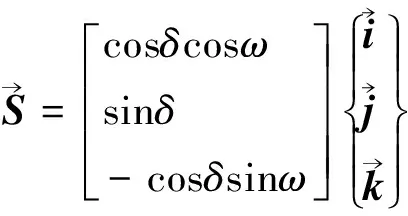
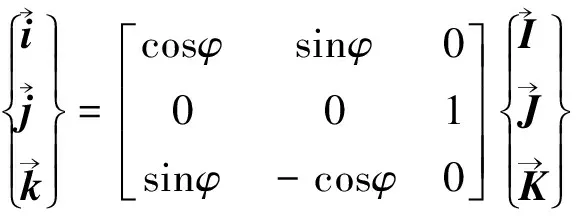
由式(1,2)可以得到两坐标系转换后的太阳入射光线的表达式为:

(4)
比较式(1,4)后,就可以得到将高度角和方位角用赤纬角、时角和地理纬度计算的公式:
sinα=sinφsinδ+cosφcosδcosω
(5)
(6)
1.2 聚光器法线
该系统采用抛物槽式集热装置,在地平坐标系中,建立和聚光器旋转轴一致的跟踪坐标系,并使两坐标原点重合[6]。
跟踪坐标系如图2所示。

图2 跟踪坐标系β—聚光器旋转轴相对水平面的倾角;N—聚光器法线方向;θ—其与太阳入射光线的夹角即入射角;τ—聚光器旋转轴的旋转角度
由图2可以得到聚光器法线的向量为:
(7)
图2中,太阳光线的入射角θ是入射光线和聚光器法线间的夹角,因此入射角为:
(8)
代入式(1),就能求出入射角θ。
1.3 跟踪系统跟踪角计算方程
为提高太阳能集热效率,理论上应使太阳入射光线和集热装置聚光面法线重合,即θ=0[7]。若采用二维全跟踪方式,即高度角-方位角两轴式跟踪,使聚光器主轴的旋转角τ反映太阳方位角运行规律,而聚光面相对水平面的倾角β反映太阳高度角运行规律;若采用一维踪方式,只能自动跟踪一个角度,倾角β固定或手动调整,此时跟踪系统的跟踪角τ的表达式为[8]:
(9)
2 机械传动系统设计
太阳能跟踪系统的机械传动系统如图3所示。
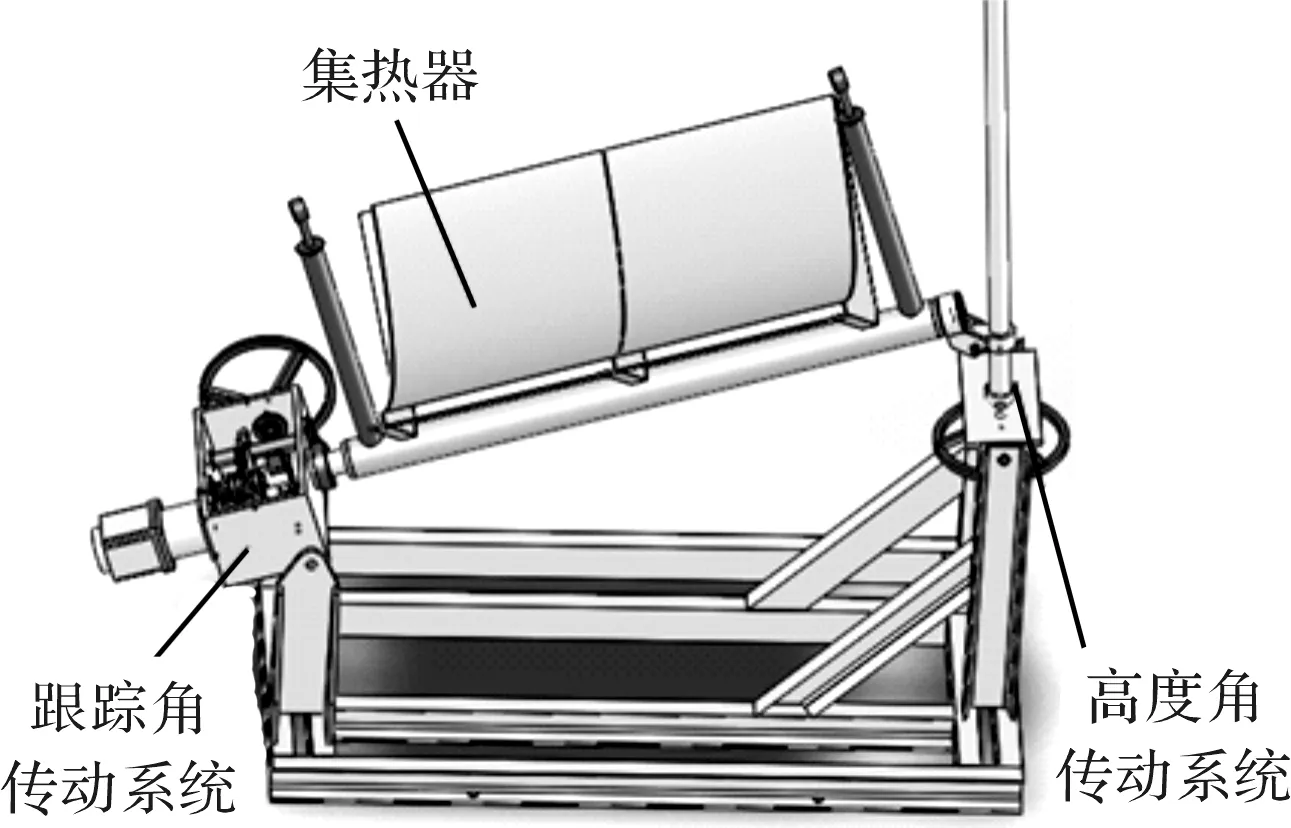
图3 机械传动系统
该系统主要由太阳能集热器、跟踪角传动系统和高度角传动系统3部分组成。其中集热器单轴槽式南北倾斜布置,通过高度角传动系统,手动调节高度倾角,以达到每天正午聚光器所在平面和太阳入射光线90°垂直效果;通过跟踪角传动系统,手/自动调整集热器主轴东西方向旋转,实时跟踪太阳位置。
2.1 太阳能集热器的设计
集热器的主体部分是聚光用的抛物面,选择抛物面焦距为0.5,聚光比大于4,抛物面的长度与兼做吸附床中的集热管的长度相当,选择长度L=700,则根据槽形抛物面最佳聚焦理论,确定抛物面的开口宽度为920。本研究选用0.4 mm镜面不锈钢作为反光材料。
聚光器支架为焊接结构,由筋板、连接条、接收器支撑和主轴4部分组成,其中筋板是聚光器支架结构中起支撑反光镜、增加聚光装置强度的重要部分。根据抛物槽形反光镜形状裁剪抛物形筋板,然后将反光镜连接在整个筋板组成的抛物形面上。反光镜和筋板的连接方式采用铆接工艺。
2.2 跟踪角传动系统设计
跟踪角设计的原理是:当太阳光线入射至聚光器表面,根据赤纬角、时角和地理纬度计算跟踪角,由控制系统发出脉冲信号,驱动步进电机转动,通过齿轮箱进行传动,带动聚光器主轴旋转,继而使聚光器东西方向旋转进行太阳视位置跟踪。
本研究选用110 mmHB系列电机的配套普通行星减速器,减速比为1∶16。由此,确定跟踪角传动系统图如图4所示。
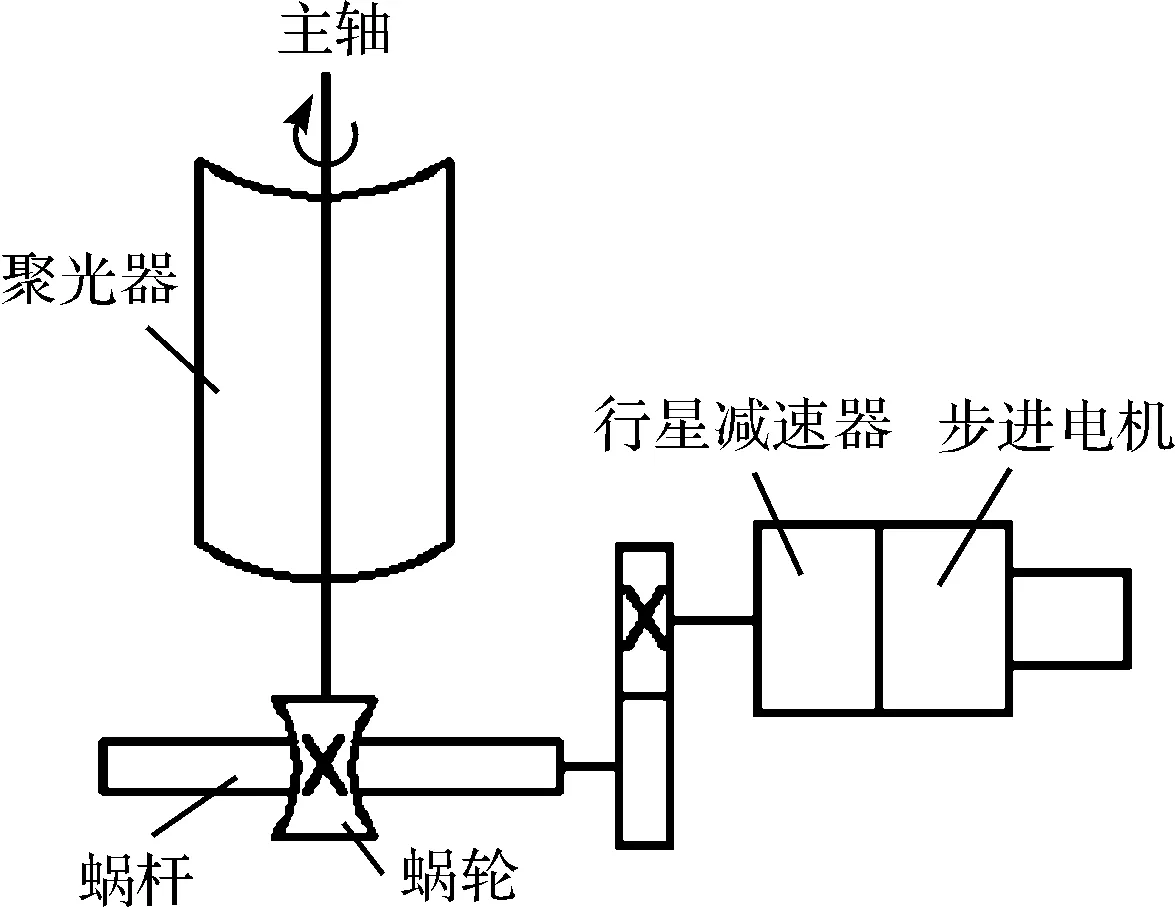
图4 跟踪角传动系统图
跟踪角传动机构如图5所示。
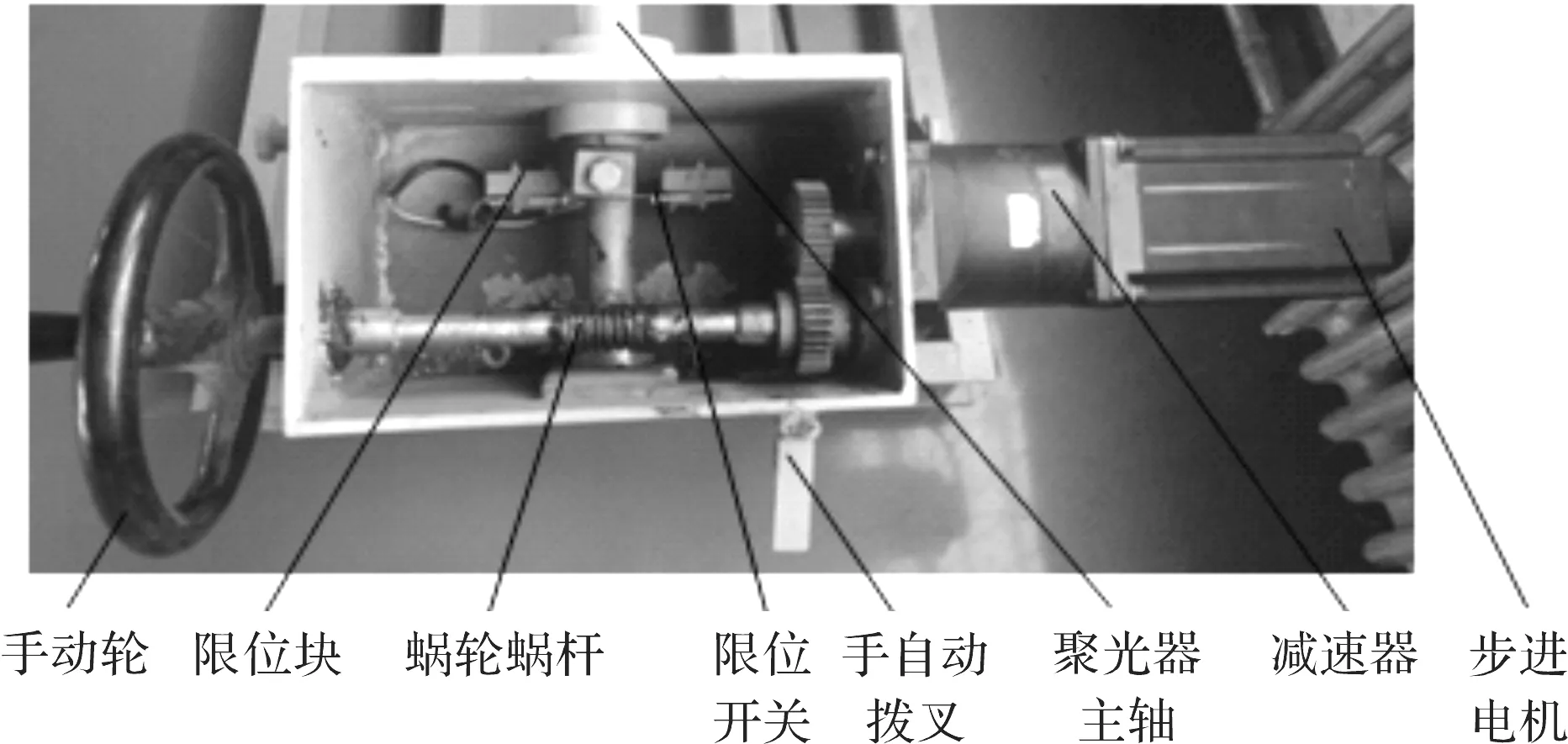
图5 跟踪角传动机构
电机带动聚光器在-90°~+90°可调,为防止聚光器超出跟踪范围发生意外,本研究转动主轴上增加了限位挡块和行程开关。同时基于系统安装初期调试和后期系统故障维修的考虑,跟踪角传动系统中设计了手动运行模式,手自动模式通过转换手柄进行切换[9-10]。
2.3 高度角传动系统设计
因跟踪方式是单轴跟踪,对高度角跟踪精度要求不高,高度角跟踪设计为手动调整。本研究采用丝杠螺母副的运动形式,调整聚光器安装平面相对水平面的倾角β,以达到每天正午聚光器所在平面和太阳入射光线90°垂直效果[11]。
3 控制系统设计
本文是基于EFM8单片机的单轴太阳能跟踪系统,利用DS12C887时钟芯片实现无电池不间断计时功能,自动读取实时日期时间,通过系统内置算法自动计算、拟合高度角、方位角和正午时间等参数,并根据间隔时间自动计算角度差,控制步进电机调整系统跟踪方位,日落后系统可自动归位至初始位置等待次日太阳升起继续调整角度。单轴太阳能跟踪系统可实现全自动7×24 h无人值守的跟踪功能。
3.1 系统硬件组成
单轴太阳能跟踪系统由EFM8单片机、DS12C887时钟芯片、数据存储模块、限位检测模块、驱动器接口、液晶屏接口和电源模块组成,硬件结构如图6所示。

图6 系统硬件结构图
系统选用EFM8BB31F64I作为主控制器,利用DS12C887时钟芯片实现时间、日期的计数,选用触摸液晶屏实现人机交互过程,通过P521光电耦合器读取限位装置的触发信息。
3.2 系统软件流程
系统软件工作流程如图7所示。
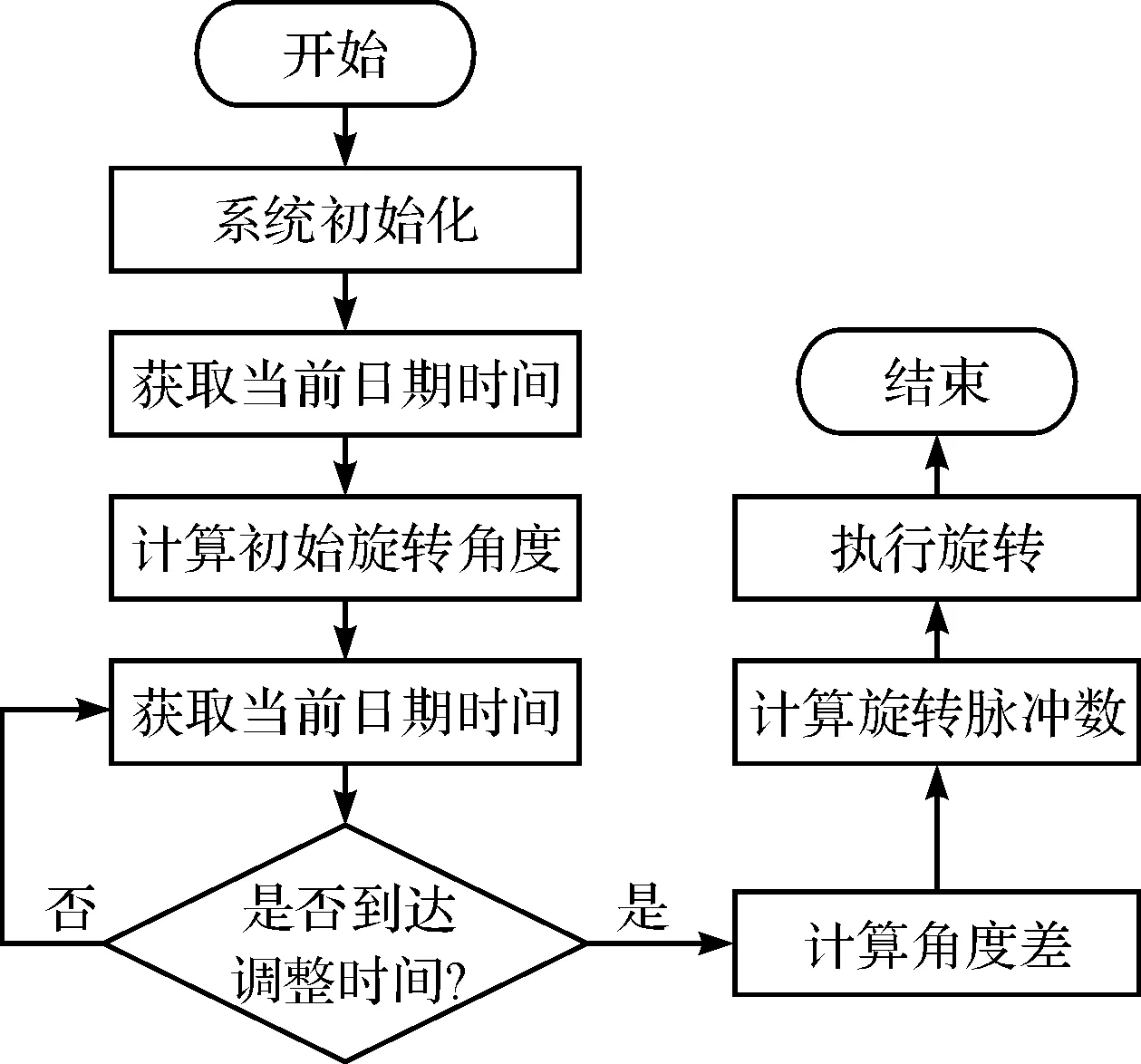
图7 系统软件流程图
3.3 系统显示界面
系统人机交互界面分3层:初始化界面、控制界面和时间调整界面。其中初始化界面用来展示系统初始化过程;控制界面可以通过触摸屏实现系统的启动、停止和复位,也可以手动调整旋转角度;时间调整界面通过系统内置数字键盘实现。
系统各层界面如图8所示。
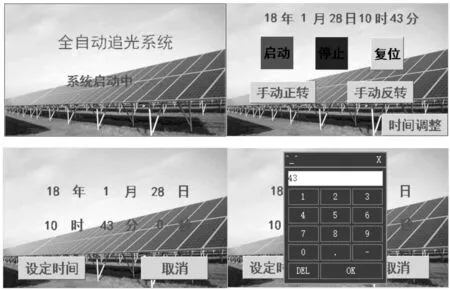
图8 系统各层显示界面
4 实验验证
4.1 机械传动系统验证
手自动转换手柄推至手动位,摇动手动手轮,集热器能够在东西方向灵活转动;摇动丝杠手轮,集热器和水平面倾角灵活可调。在手动速度大于40 r/min时,集热器仍能平稳运行,停止摇动手轮时,集热器能迅速制动,自锁性能好。
4.2 控制系统的可行性验证
现场联机调试如图9所示。

图9 现场联机调试
跟踪系统开始运行后,控制箱控制步进电机通过减速装置带动槽式太阳能集热器自东向西运转,运转至给定位置时,间隔时间10 s(实际10 min),10 min后(60组脉冲完)电机反向运转到起始位置;将正转脉冲数增加,当碰触到正转限位开关时集热器停止运动并反向运动至起始位置;增加反转脉冲数,当碰触到反转限位开关时集热器停止运动;用手自动转换手柄切换到手动位置,可对集热器进行手动调整。
实验结果表明,控制系统能达到预期控制目标。
4.3 跟踪系统精度测试及分析
为验证跟踪系统精度,笔者选择2 000 mm×60 mm×0.5 mm的铝板安装在集热器的焦线上,代替高真空集热管来采集太阳位置信息。槽形抛物镜面将太阳光线反射汇集在焦线上,铝板接收器放置在焦线上。跟踪角测试原理图如图10所示。
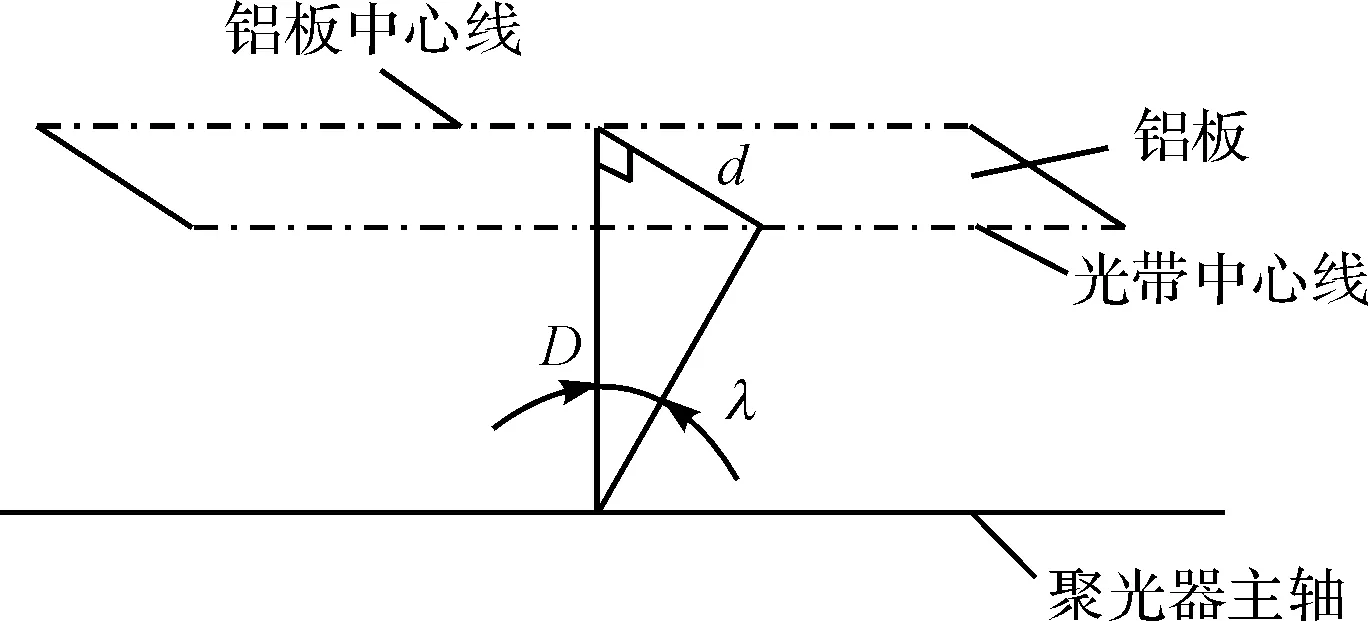
图10 跟踪角测试原理图 d—光带中心线到铝板中心线的距离;D—铝板中心到聚光器旋转主轴的距离;λ角(tanλ=d/D)—反映聚光器理论位置和实际位置之间的偏差
该实验在8月天气晴朗条件下,对照射在铝板上的光带中心位置进行了多次测试,测试结果如表1所示。
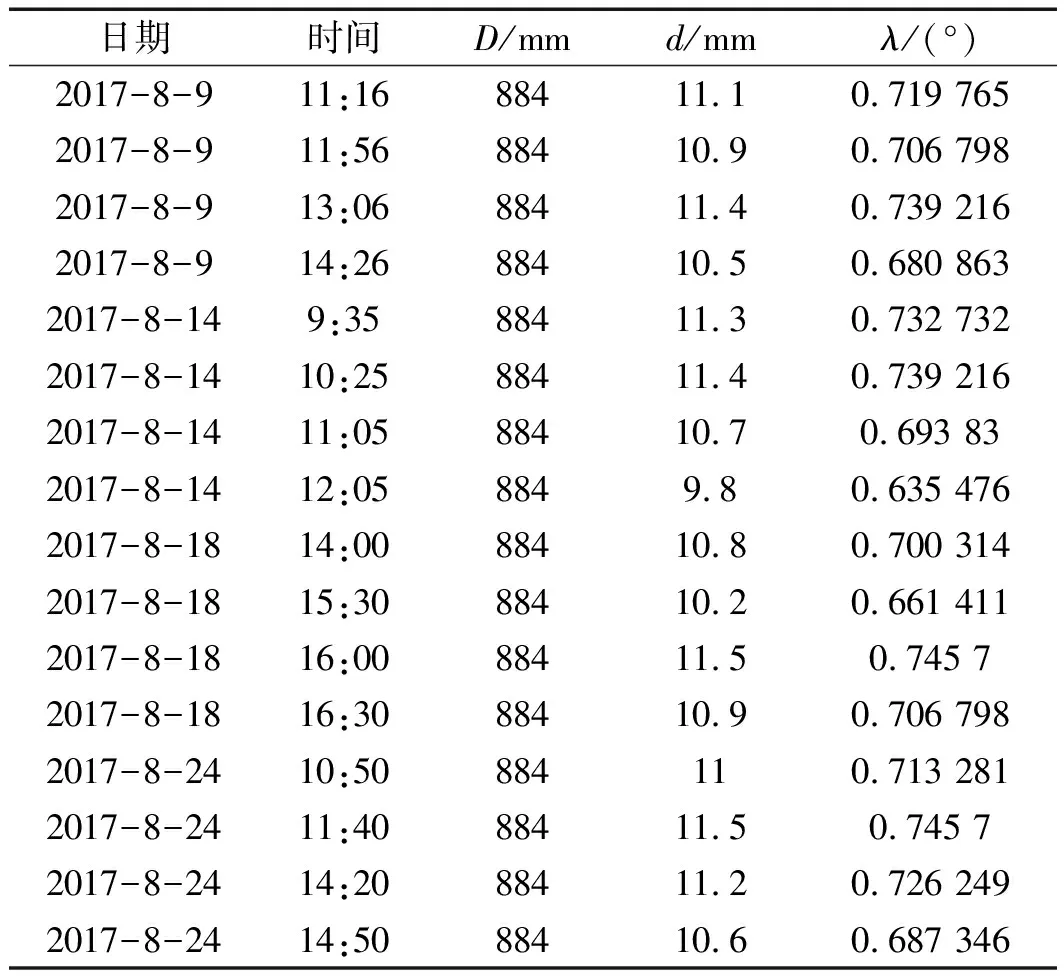
表1 跟踪系统精度测试数据
笔者分析表中数据,集热器跟踪误差λ在±0.75°以内,即设计的跟踪系统的跟踪精度在1.5°以内。分析误差存在的原因一方面是理论计算过程中舍弃了部分字长,将误差带入跟踪角计算结果中,使跟踪角计算误差反映到跟踪精度上;另一方面是控制系统本身的误差,其中有机械结构误差、齿轮、蜗杆传动间隙造成的误差等。
5 结束语
本研究设计的吸附式制冷系统中槽式太阳能跟踪系统,其接收器兼做吸附式制冷系统的吸附床,用于制冷需求高峰而太阳辐射充足匹配性高的季节。
样机现场测试表明:这种单轴抛物槽式太阳能集热器具有操作方便、质轻、高效的特点;机械设计结构符合加工工艺性能要求,结构简单;采用单片机控制的跟踪系统可解决手动、半自动跟踪系统的调整困难,精度差等问题,其自动化程度高、精度高、集热性能好、人为干预小,适用于各类太阳能光伏发电和其他太阳能收集系统。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
能源工程(2022年3期)2022-06-23
矿产勘查(2020年2期)2020-12-28
北方建筑(2020年2期)2020-12-14
太阳能(2020年8期)2020-09-01
中国测试(2018年10期)2018-11-17
中国工程咨询(2017年4期)2017-01-31
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
中国铁道科学(2015年5期)2015-06-21
太阳能(2015年6期)2015-02-28
