
全自动泔水桶清洁机器人
2018-11-26 05:34文四川省泸州市第十二中学胡铭哲罗小界
发明与创新 2018年42期
文四川省泸州市第十二中学 胡铭哲 罗小界
学生在学校就餐完毕后,要将剩饭、剩菜倒入专门的回收桶中。由于人多桶少,倒饭时十分拥挤,不仅影响就餐体验,还要排很久的队,浪费时间。
为了解决上述问题,我们设计了一款服务型机器人——全自动泔水桶清洁机器人。
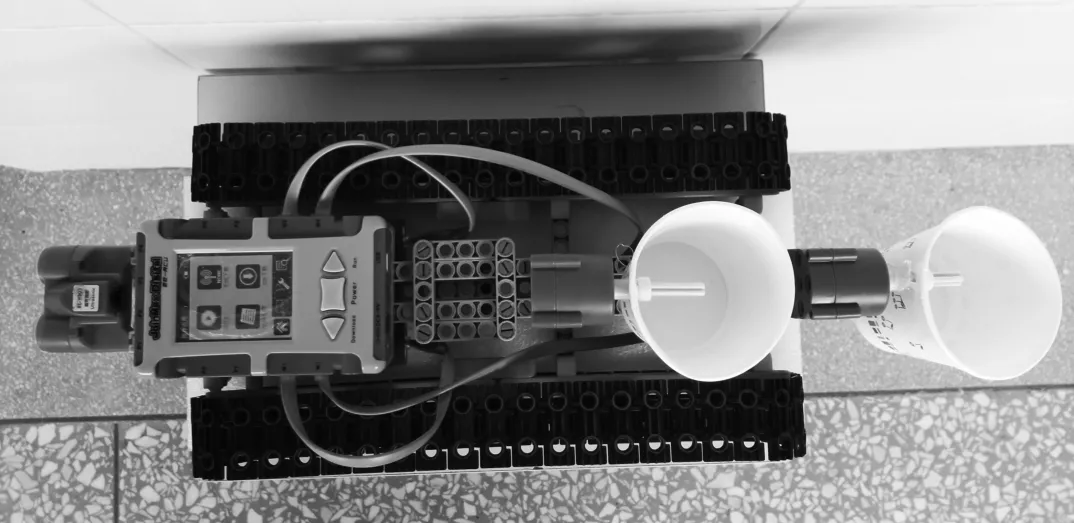
该机器人主要由8个接口的主控器、动力系统、翻倒系统、侦测系统组成。除了用磁钉确定路线外,还可让机器人利用光电传感器循着固定路线行走。为了能及时、准确地规避障碍,我们还为它装上了超声波传感器、图像识别系统。
通过编程,该机器人能反复寻找想要倒泔水的同学,直到最后一名同学离开食堂。然后它会将泔水送到指定的地方。
全自动泔水桶清洁机器人不仅节省人力,还有利于将餐盘与餐勺分开,让后勤管理更便捷。


猜你喜欢
快乐语文(2021年15期)2021-06-15
数学小灵通·3-4年级(2020年11期)2020-12-14
数学小灵通·3-4年级(2020年3期)2020-06-24
童话世界(2020年13期)2020-06-15
中国食品(2019年1期)2019-09-10
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
农村百事通(2019年1期)2019-01-30
小学生导刊(2017年31期)2017-08-15
资源节约与环保(2016年1期)2016-12-16
