基于无人机遥感影像监测土地整治项目道路沟渠利用情况
2018-11-23 07:38:34顾铮鸣金晓斌杨晓艳赵庆利蒋宇超周寅康
农业工程学报 2018年23期
顾铮鸣,金晓斌,2,3※,杨晓艳,赵庆利,蒋宇超,韩 博,单 薇,刘 晶,周寅康,2,3
基于无人机遥感影像监测土地整治项目道路沟渠利用情况
顾铮鸣1,金晓斌1,2,3※,杨晓艳4,赵庆利4,蒋宇超1,韩 博1,单 薇1,刘 晶1,周寅康1,2,3
(1. 南京大学地理与海洋科学学院,南京 210023;2. 国土资源部海岸带开发与保护重点实验室,南京 210023;3. 江苏省土地开发整理技术工程中心,南京 210023;4.国土资源部土地整治中心,北京 100035)
为客观监测和有效评价土地整治项目基础设施建后利用情况,初步探讨利用无人机航拍影像结合智能算法识别设施利用状态的可能性,该文选取典型项目,利用多旋翼无人机航拍获取高分辨率影像,提取田间道路和骨干沟渠影像网格切片,通过BoW模型构建典型地物样本特征库基于样本纹理特征进行分类,利用支持向量机模型对研究区骨干线状基础设施利用状况进行识别,并依据目视解译和实地勘察对识别结果进行了精度验证。结果显示无人机遥感方法可以初步识别研究区基础设施建后利用情况;研究区田间道路病害和骨干沟渠淤塞情况识别总体分类精度达到80%和70%;田间道路分类误差主要来自通行不畅与路面裂缝,骨干沟渠分类误差主要来自轻度淤塞;提高影像精度情况下,田间道路利用状况识别精度有所提升但不显著,骨干沟渠通畅状况识别精度无明显变化,模型对宽度2 m以下沟渠识别结果精度较差。研究表明,基于无人机遥感对土地整治项目基础设施利用情况进行自动分类识别具有可行性且效率较高,而监测精度有待于后期进一步提升。
无人机;遥感;模型;土地整治;基础设施
0 引 言
土地整治是当前中国提高土地利用效率和支持农村发展的有效手段,对保护耕地资源、完善农田基础设施、改善农业生产条件、增加农民收入等都发挥了积极作用[1-3]。土地整治项目建设的基础设施,直接服务于农民的生产生活,是实现农用地高产稳产、旱涝保收的重要保障[4]。当前土地整治项目竣工验收后主要采取整体移交方式,所建基础设施一般交由基层政府进行管理,但由于缺乏专项资金支持,部分基础设施由于管护责任不落实、管护措施不到位等原因,出现路面损坏、沟渠淤积等问题,一定程度上影响了整治效益的持续发挥[5]。因此,通过科学方法对土地整治项目基础设施建后利用进行实时、动态监测对提升土地整治项目建后管理水平,促进土地整治项目持续发挥等都具有重要意义。
随着遥感监测技术从大尺度到小尺度,从低精度向高精度的方向发展,土地整治遥感监测技术逐渐成为土地整治监测的重要组成部分[6-7]。有效的土地整治监测不仅涉及建设任务和工程数量,还需了解工程质量和实际利用情况,而现阶段卫星影像的分辨率及纹理特征尚难以实现这一目标[8]。因此,寻求一种可靠且高效的技术手段来提高基础设施监测的效率和精度是当前土地整治监管中亟待解决的现实问题[9]。田间道路工程和灌溉排水工程作为土地整治工程中的重要线状地物,目前对于整治工程线状地物识别已有大量研究,其中地物分布信息提取主要基于遥感卫星影像数据[10],识别方法主要有监督分类与目视解译相结合[11]、自组织分类[12]、数字高程模型(digital elevation model,DEM)提取[13]及面向对象法等[14]。监督分类法与目视解译法识别精度高,但自动化程度较低;自组织分类法在地物异质性比较复杂情况下表现较差[14];DEM提取受数据源影响,识别精度有限[13];面向对象法需要将影像划分为包含光谱、形状、纹理特征的影像对象,对影像要求较高。从识别方法来看,除目视解译外,已有研究方法对数据源的格式及精度有较高限制。
近年来,无人机遥感平台具有运载便利、灵活性高、作业周期短,影像数据分辨率高等优势,可提供丰富的地物空间结构和细节信息,在关键地物提取[15]、自然灾害监测[16]、水土保持监测[17]等方面取得了广泛的应用。无人机遥感技术在表达地物几何纹理、拓扑关系等特征参量方面更为细致,增强了对地物的识别能力,使其对关键地物信息的提取更加快捷、完整[18]。在借助无人机进行土地整治项目监测方面,已有研究多利用地物与背景之间的光谱与纹理差异实现分类,如整治区作物分类[19],路网、沟渠提取[20],作物产能评估等[21]。在地物提取与状态识别方面,当前线状对象遥感识别研究主要集中在如何提高研究对象的识别精度和效率,土地整治工程基础设施监测需要对目标地物自身状态进行判别,已有研究对此关注较少。因此,需要寻求一种影像获取简便、精度适中、方法智能的监测手段满足土地整治建后利用监测快速、准确的工作要求。
针对土地整治基础设施遥感监测难以自动识别监测地物细部利用状态等问题,从数据获取的便利性和识别手段通用性出发,本研究拟利用通用无人机平台获取项目区影像,通过BoW(bag of words,词袋)模型对土地整治项目区内典型地物特征纹理信息构建特征识别库,利用智能识别算法对主要基础设施使用状况进行分类识别,进而讨论不同空间分辨率影像以及不同等级工程设施的分类效果,以期对土地整治项目区内基础设施建后利用状况实现有效识别,为土地管理部门和业务单位对土地整治监测监管提供技术支持和数据支撑。
1 研究方法
本研究对土地整治项目基础设施使用状态的识别包括数据预处理、地物提取、特征分类和精度评价4个部分。首先使用大疆无人机平台航拍影像并拼接;其次使用ArcGIS10.2进行关键地物提取;然后基于BoW词袋模型进行图像特征分类,并将样本特征库导入支持向量机(support vector machine,SVM)分类器进行训练;最后对分类结果进行精度评价。总体研究框架如图1所示。
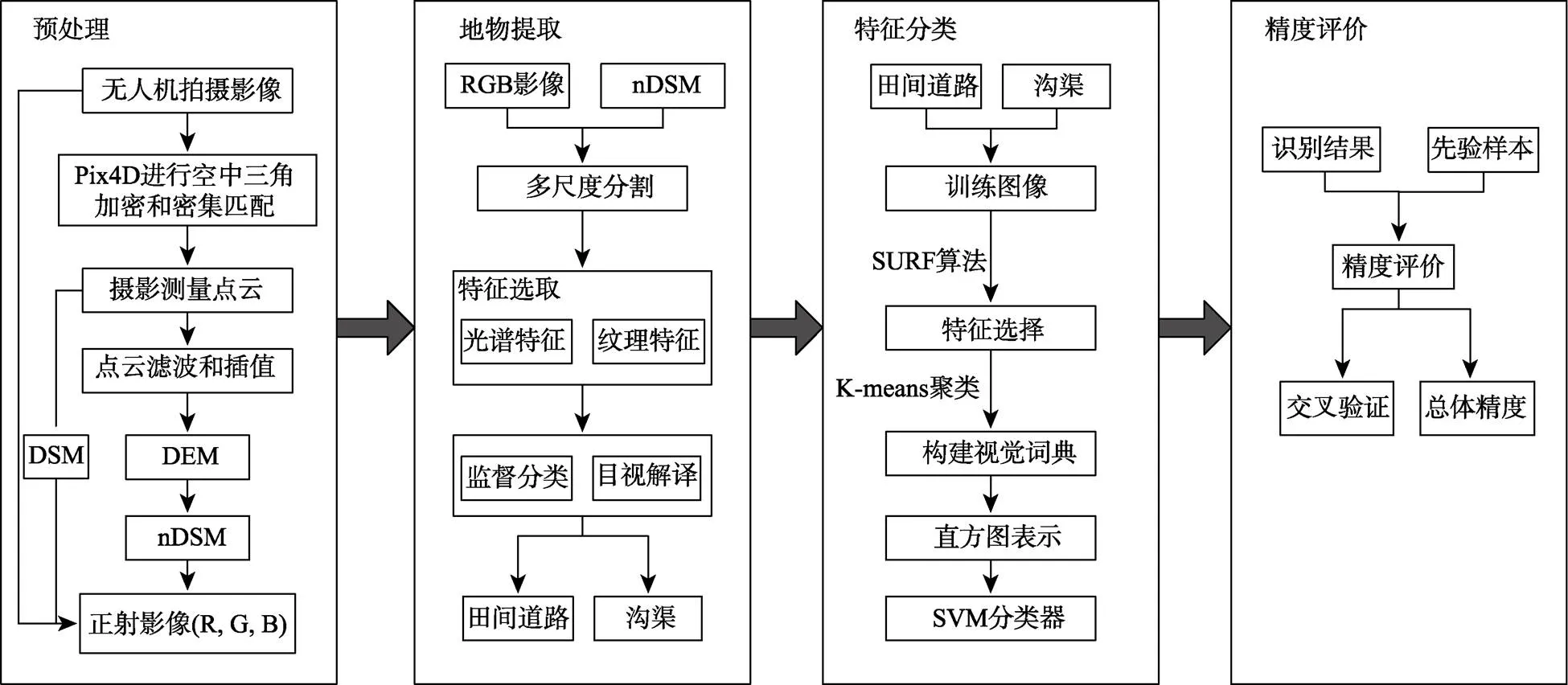
图1 研究总体技术框架
判断地物特征的关键在于图像特征描述。虽然人工目视解译能够较为准确地对影像信息进行抽象,但存在工作量大、效率低、主观性强等缺陷。本研究基于影像的局部纹理特征,采用BoW模型进行特征抽象。BoW最早用于文档识别与分类,近年来被广泛应用于图像目标分类与场景分类[22],其优点在于既可保存图像的局部特征,也能有效压缩图像描述。该模型首先获取影像的特征向量,通过聚类算法建立视觉词汇表,然后将图像解析为视觉单词,最后利用得到的影像视觉单词直方图来训练分类器[23]。BoW图像表达一般包含三部分内容,即特征提取、视觉词典构造和分类器训练。特征提取主要是为了表示图像,从给定的图像中提取全局或局部特征;视觉词典构造主要对提取的图像特征进行聚类,以聚类中心作为视觉单词,将所有聚类中心进行集合,从而构造视觉词典;分类器训练用于全部图像的分类与识别。本研究在特征提取阶段采用加速鲁棒性算法(speeded-up robust features, SURF);在视觉词典构造阶段使用-means聚类算法;在图像分类中使用SVM分类器。
1.1 图像特征提取
图像特征分为全局特征和局部特征,由于全局特征无法描述图像局部纹理,本研究基于图像局部纹理特征对典型地物进行特征提取[25]。考虑到研究区影像由于图像拼接所导致的潜在形变及日照影响,使用SURF算法对图像特征进行识别。该方法通过对原影像求积分,使用Harr小波求导代替高斯滤波,并采用Hessian矩阵增加特征点的健壮性[24]。通过该方法,图像在发生旋转、缩放和光照变化等情况下都具有较好的稳定性。具体实现过程如下:
1)原始影像处理:将原影像的灰度值累加得到积分影像,提高获取特征点的速度。
2)检测极值点:通过高斯卷积对影像进行平滑处理,再进行差分运算,对于非连续的影响空间点()和尺度参数,Hessian矩阵可写为
式中D()为高斯滤波二级导数()同图像卷积的结果,()是高斯-拉普拉斯变换算子中的高斯扩展函数,D()、D()、D()的含义与D()类似。
3)确定主方向:为保证SURF特征的旋转不变性,以特征点为圆心,在一定区域内对π/6扇形区域内所有点在水平和垂直方向的Haar小波响应值进行累加,最大的Harr响应累加值即为该特征点对应的主方向。
4)特征点匹配:首先将一幅影像中的一个特征点作为目标点,在另一幅影像中让每个特征点与之进行匹配,当某个特征点与目标点的特征向量之间距离小于某个阈值时则判断此点为同名特征点。本研究使用欧氏距离法,公式如下

式中X1X2为影像中特征点与目标点,统计另外一幅影像中所有特征点与目标点的距离,获得最短的2个距离Dist 1和Dist 2,计算它们之间比率

如果比率小于设定的阈值,则判断该两点为同名点。
1.2 视觉词典构造
图像视觉词典即对图像局部特征进行聚类的构造过程。聚类得到的聚类中心即为视觉单词,所有视觉单词的集合构成图像的视觉词典,并对后续图像产生影响[25]。从易于实现的角度,本研究选择-means聚类算法。其表达式如下
式中为聚类中心数,C为聚类中心,=1,…,,x为聚类对象。
-means聚类主要步骤分为以下4步:①随机给出个聚类中心作为待聚类点的聚类中心;②计算待聚类点与每个聚类中心的距离,然后将待聚类点划入与其距离最近的聚类;③计算每个聚类中心内全部点的坐标平均值,并将该平均值作为新的聚类中心;④重复步骤②与③,直到结果收敛。
1.3 SVM图像分类
在提取图像的视觉特征的基础上,采用SVM分类器进行样本分类。SVM属于监督型机器学习算法,在小样本、非线性情况下,具有更快的学习速度和精度,广泛应用于高分遥感影像分类中[26-27]。SVM的核心思想是通过在原空间或经过投影后的高维空间中构造最优分类超平面,在保证分类的情况下,使得两类的分类空白区域最大,通过引入核映射方法将低维空间中的非线性问题转化为高维空间的线性可分问题[28-29]。应用二次规划方法求解最优决策函数为

式中a为Lagrange乘子,y为类别标签,为分类阈值,(x,)为核函数。
SVM的分类精度主要取决于核函数与参数选取,常见核函数有线性核函数、多项式核函数、径向基核函数、神经网络核函数等。本研究使用LibSVM软件包进行SVM分类,基于径向基核函数(radial basis function, RBF)采用网格划分法寻找最优参数(惩罚系数与核函数半径),进而进行分类。
2 实证分析
2.1 研究区及数据源
2.1.1 研究区概况
本研究选取湖南省常德市鼎城区某高标准农田建设项目作为研究案例。该项目位于鼎城区东北部,地处120°00¢56²E~120°05¢23²E,29°09¢05²N~29°15¢01²N,项目区位置见图2。项目区属中亚热带向北亚热带过渡的季风湿润气候,日照充足,冬冷夏热,四季分明;多年均气温16.8 ℃,年降水量1 340 mm,全年无霜期约281 d;项目区地势开阔平坦,树木遮蔽少,平均高程25 m,地面坡度小于2°。项目区农业生产以粮食作物为主,主要种植双季水稻。
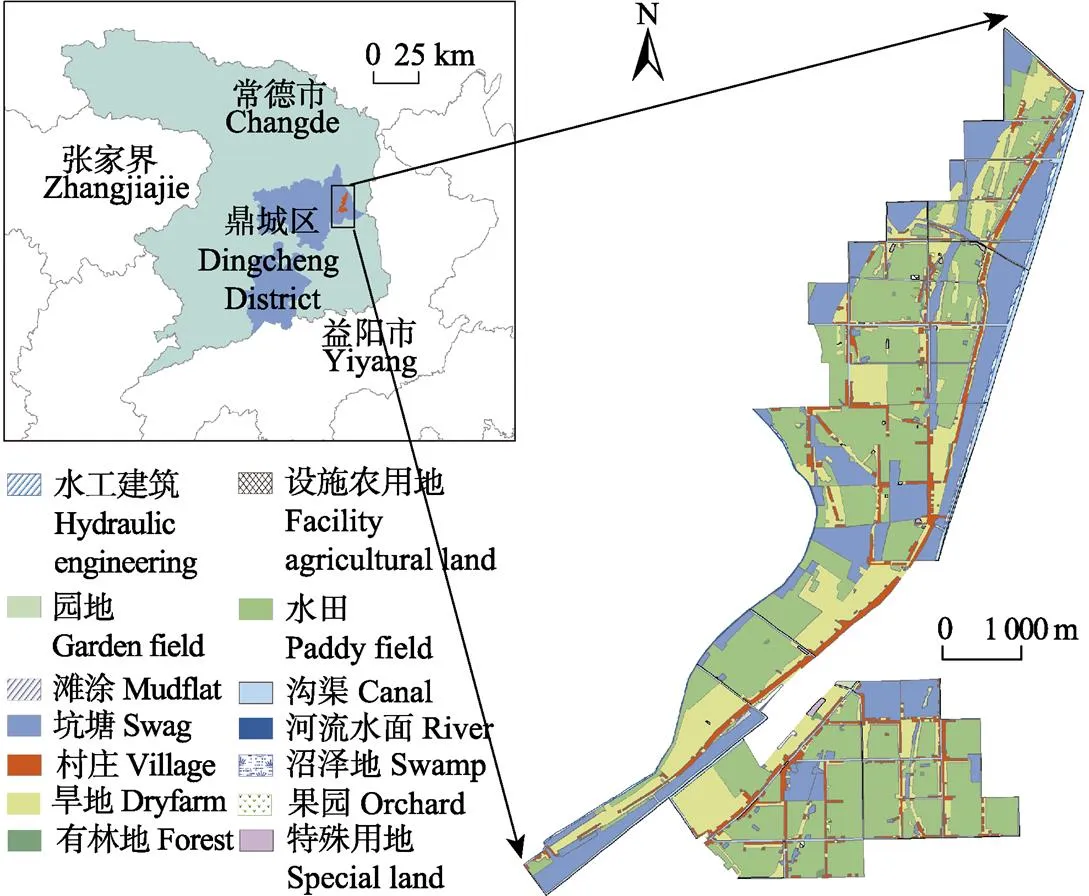
图2 常德市鼎城区研究区概况
项目建设规模2 867.66 hm2,总投资8 541.78万元,实施期为2011—2013年。项目共涉及12个行政村,实现新增耕地217.45 hm2,共完成土地平整工程309.80 hm2,开挖土方31.18万m3;新修、整修灌溉渠道、排水沟及灌排两用渠道264.23 km,管涵4 548座,蓄水池180座,新修泵站180座,机耕桥60座,输电线路1.41 km;整修、新修田间道297.44 km,生产路173.81 km。通过项目实施,完善了项目区内的灌排设施,提升了基础设施配套水平,完善了田间道路系统,促进农业生产由传统种植方式向多产业融合发展。
2.1.2 数据源
本研究使用的数据包括项目竣工验收资料和无人机航拍影像。竣工验收资料包括项目竣工验收报告、工程平面布置图(1∶2 000)和项目竣工验收图(1∶2 000)。影像数据由无人机航拍获取获得,拍摄时间为2017年11月29日正午时分,无云,微风三级左右。采用的拍摄系统为大疆精灵4小型无人机平台,搭载其自带相机,影像传感器为12.8 mmCMOS,有效像素2 000万,24 mm光圈镜头。
无人机飞行相关参数见表1。研究区内大部分为耕地,具有显著特征的地物较少,为保证影像匹配精度,在航线规划中增加了重叠度,航向重叠不低于75%,侧向重叠不低于80%。由于航拍片为单幅(面积约为0.1 hm2)形式的栅格图片,故需对图幅进行拼接和预处理。使用Pix4D Mapper数字摄影测量软件进行空中三角加密,生成摄影测量点云及正射影像,使用TerraScan中的不规则三角网加密滤波方法进行点云滤波。在ENVI5.3中对影像进行正射校正,经配准后得到研究区影像。为保障影像精度以及对地物辨识的有效性作进一步验证,对重点研究区域进行了补充拍摄和倾斜拍摄,以进一步探讨不同影像空间分辨率与线状工程宽度对分类结果的影响。
图3为研究区飞行航线与影像范围,其中航线1是为了获取研究区总体情况,所得到的影像空间分辨率为0.2 m,拍摄面积为25 hm2;航线2a沿研究区主要田间道路沟渠进行高精度拍摄,所获取的影像空间分辨率为0.1 m,拍摄面积为15 hm2;航线2b进行倾斜拍摄以获取关键地物细部纹理特征,所获取的影像空间分辨率为0.1 m,拍摄面积为15 hm2。遥感影像的投影参数为UTM(Zone 49)/WGS84。

表1 无人机飞行航线详细参数
注:航线1飞高300 m,航线2a飞高150 m,航线2b飞高150 m.
Note: Route 1: Flight height at 300 m; Route 2a: Flight height at 150 m; Route 2b:Flight height at 150 m.

图3 研究区飞行航线与影像范围
2.2 典型要素提取
根据《高标准农田建设通则》,土地整治工程包括土地平整等面状工程,灌排沟渠、田间道路、防护林网等线性工程,以及机耕桥、泵站、闸门等点状工程[30]。受航拍影像光谱及纹理特征的影响,线状工程由于具有灰度均一、排列有序、纹理特征明显等特点,其利用状况在遥感影像上易于识别。当线状工程出现的损坏或出现堆积物,会引起地表粗糙度和反射率发生变化,从而改变影像中的灰度均一性及纹理结构。同时,单个像元对应的地面面积越小,地物轮廓特征也越清晰。考虑到本研究航拍照片精度(0.1~0.2 m),目视解译能识别的损坏一般大于10个像元,因此初步选择识别的整治工程线状地物宽度大于2 m。
本研究选择一级田间道(路面宽度3 m,混凝土路面)、斗渠(底宽1.0 m、上口宽2.0 m、深度1.0 m、边坡比1∶0.5,混凝土板衬砌)和斗沟(底宽1.6 m、上口宽3 m、深度1.4 m、边坡比1∶0.5,混凝土板衬砌)作为监测对象,在ArcGIS10.2下对道路、沟渠中线设置缓冲区,沿缓冲区对影像进行裁剪,利用“Create Fishnet”工具生成相应的矢量网格并编号,在Matlab 2017根据网格大小进行影像切片,切片名称与生成的道路、沟渠网格编号一致,所得到的影像库即为待判断的样本总体。研究区田间道路、沟渠提取情况如图4所示。由图4可知,研究区田间道路和骨干沟渠呈相间分布。
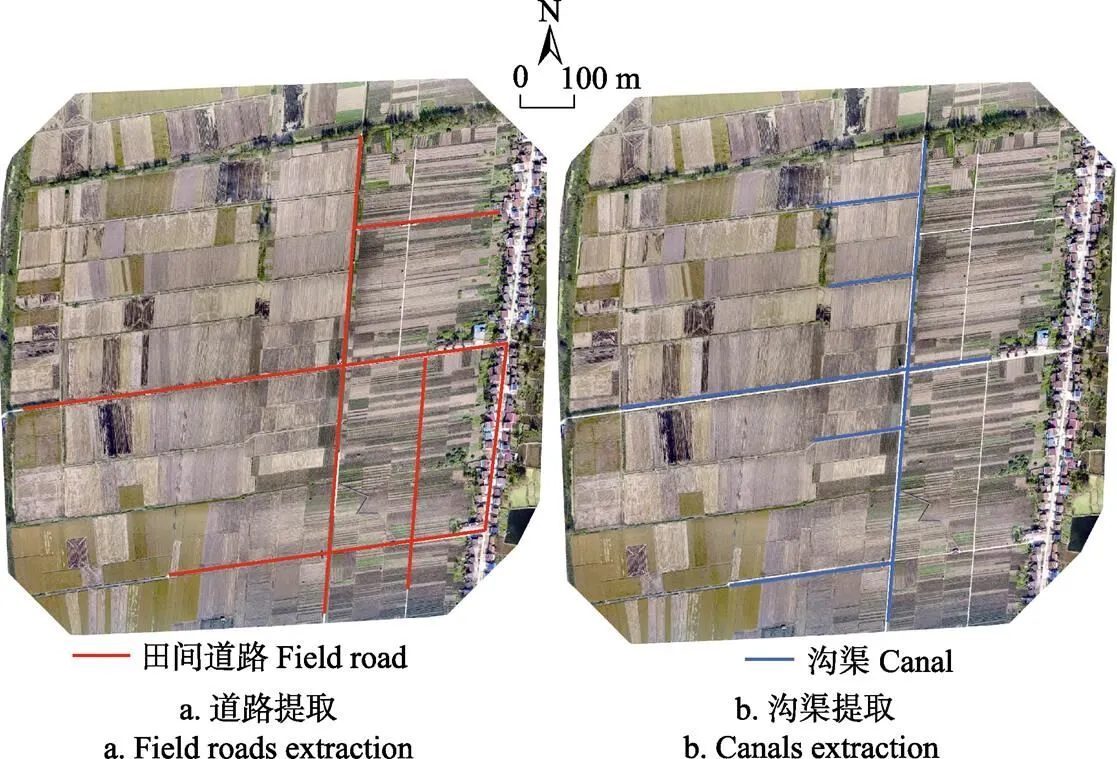
图4 研究区田间道路、沟渠提取
2.3 要素特征分类
项目竣工验收后,由于未建立明确的管护制度,也缺乏相应的管护资金,部分道路陆续出现破损、开裂、坑洼等损坏,沟渠也部分出现破损、淤塞等问题。图5为研究区道路病害和沟渠淤塞情况在航拍影像中的对应,根据项目区实际,将项目区田间道路分为完好、裂缝、通行不畅和坑洼4种类型。将路面完好影响特征描述为路面光洁,亮度较高,无阴影或斑块,如图5a所示;路面裂缝特征为路面上有条带状不规则阴影,如图5b所示;通行不畅特征为道路两侧不规则纹理特征过多,颜色发暗,如图5c所示;道路坑洼特征为路面上存在团状或絮状斑块,纹理不特定,如图5d所示。将沟渠(去除渠/沟上构筑物)分为通畅沟渠、轻度淤塞和重度淤塞3种类型,如图5e、5f、5g所示,其中通畅沟渠影像特征为灌水沟渠渠道较暗,呈深绿色,两侧护坡特征明显;轻度淤塞特征为灌水沟渠内或两侧植被过多,但尚未完全覆盖水面;重度淤塞特征为灌水沟渠内或两侧植被完全覆盖水面。根据影像像元和纹理特征,构建沟渠样本特征库。考虑到分类精度,切片覆盖范围为3 m´3 m。先验判定的影像切片即训练样本,占全部影像切片的20%,剩余影像切片作为测试样本用于地物状态识别。
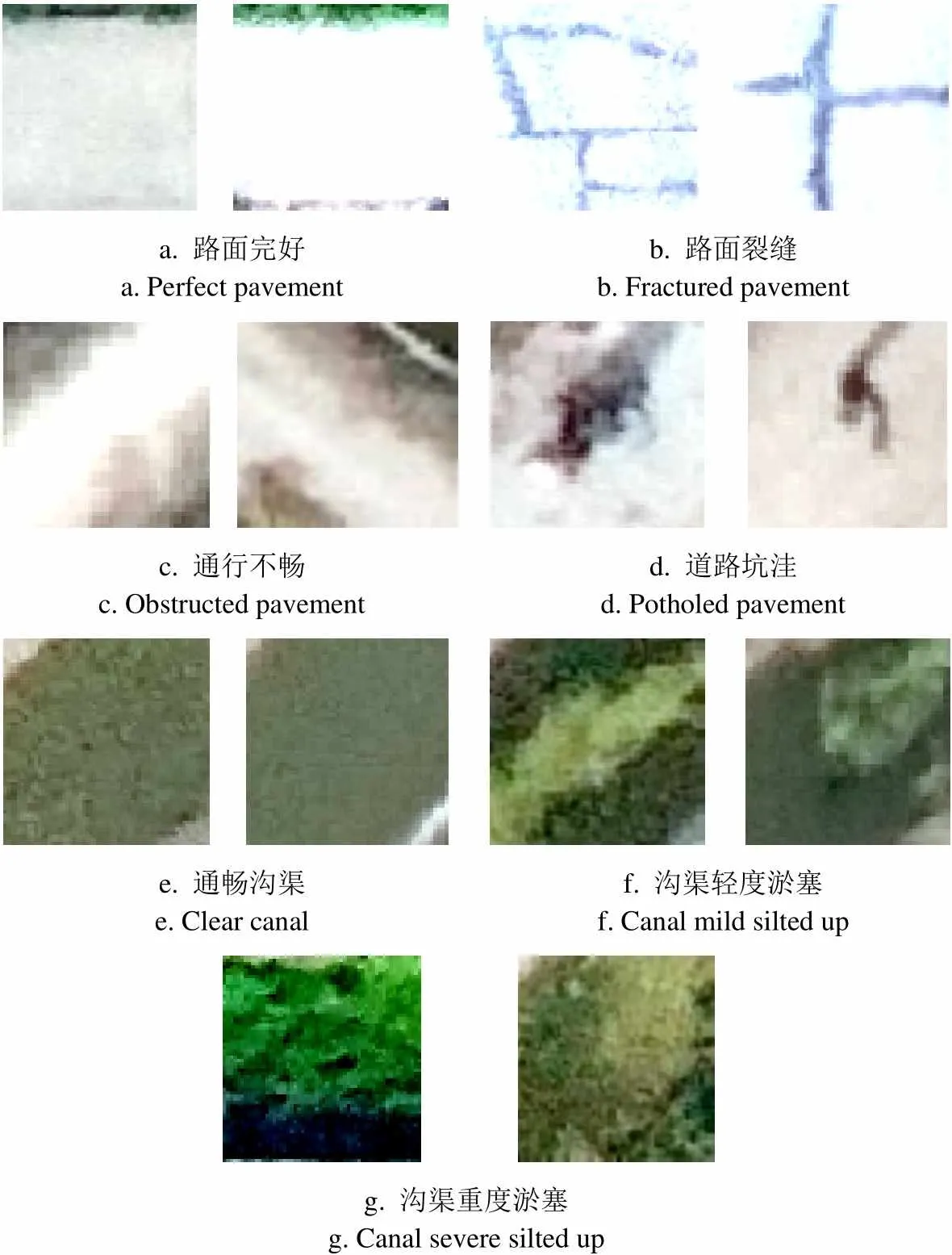
a. 路面完好 a. Perfect pavementb. 路面裂缝 b. Fractured pavement c. 通行不畅 c. Obstructed pavementd. 道路坑洼 d. Potholed pavement e. 通畅沟渠 e.Clear canalf.沟渠轻度淤塞 f. Canal mild silted up g.沟渠重度淤塞 g. Canal severe silted up
3 结果与分析
本研究随机选择80%的训练样本用来构建视觉词典以指导分类,20%的训练样本未参与分类,用于输出分类结果后的精度验证。为提高聚类精度,分别随机选用样本库中500、600、700、800、1 000张图片,寻求提取特征最有效的同时构建的视觉词典越小,结果表明,在词袋数为800的时候特征聚类效果最佳。运行模型得到项目区田间道路和沟渠利用状态的分类结果,经过随机选择训练样本重复运行20次之后,比较分类结果与先验训练样本之间的吻合度,选择吻合度最高的识别结果作为最终结果输出。
3.1 分类结果
道路使用状态的分类结果如图6a所示。分类道路总长3 060 m(航线1),其中,完好道路2 424 m,占分类道路总长度的79.2%;有裂缝道路177 m,占比5.8%;通行不畅道路198 m,占比6.5%;坑洼道路330 m,占比10.8%。结果显示,研究区田间道路建成后,面临的主要问题是通行不畅和道路坑洼。在空间分布上,路面裂缝主要发生在与项目区外道路联通或村庄通往田块的道路上;通行不畅主要分布在靠近下田坡道的部分,主要表现为路面泥土或杂物过多;坑洼道路主要分布在道路交叉口或与便桥、涵洞的交汇处。
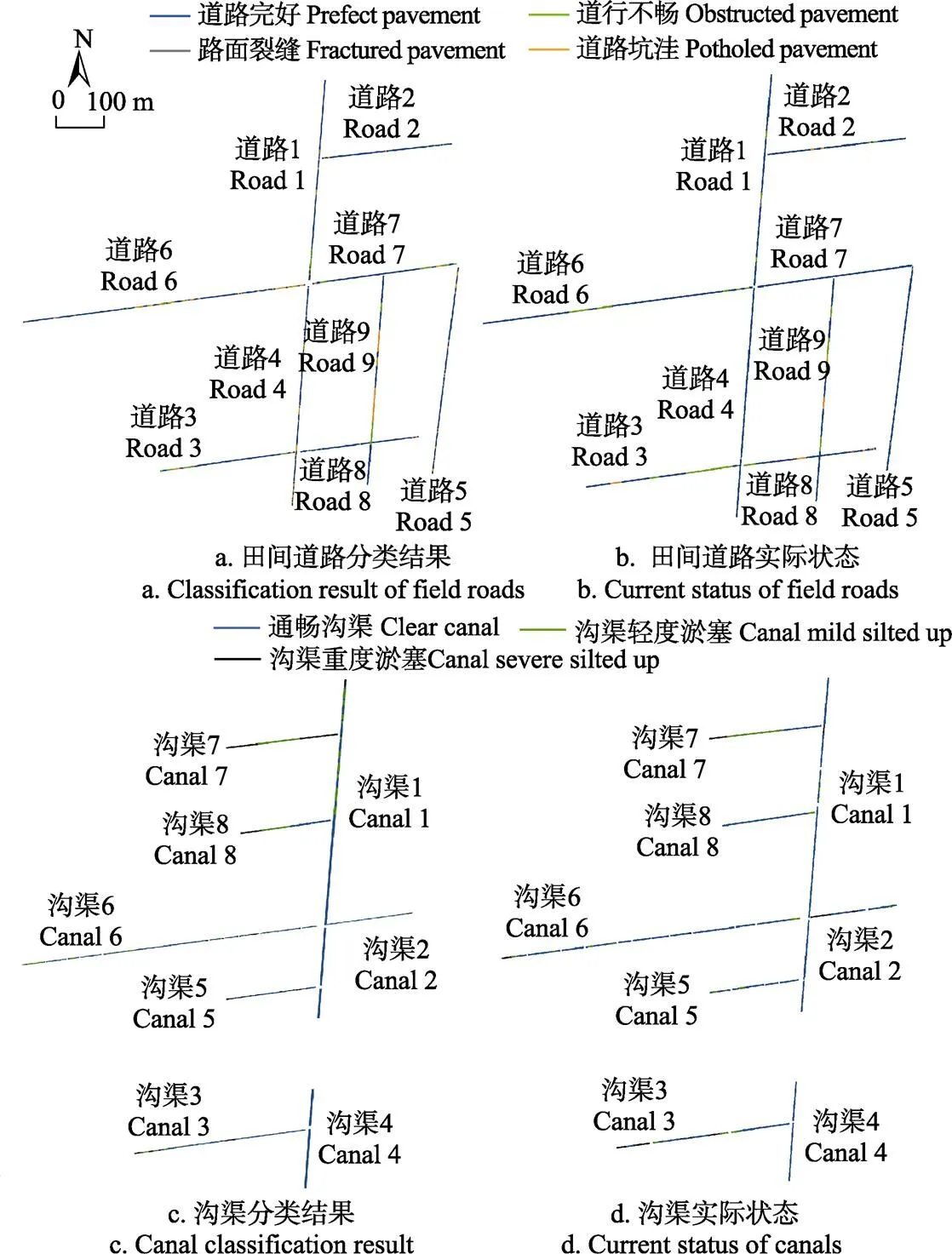
图6 研究区田间道路沟渠状态识别结果
沟渠淤塞状态的分类结果如图6c所示。分类沟渠总长1 779 m(航线1),其中,通畅沟渠1 303 m,占分类沟渠总长的73.2%;轻度淤塞沟渠333 m,占比18.7%;重度淤塞沟渠143 m,占比8.0%。结果显示,项目区沟渠通畅情况总体良好,但存在轻度淤塞问题。在空间分布上,淤塞部分主要集中在水流较慢的沟渠末端部分以及涵洞附近。
3.2 精度验证
以目视解译结合实地勘察所得实际结果作为实测值(图6b,图6d)对结果精度进行检验,统计田间道路、沟渠SVM分类与实测值的误差。误分结果如表2、表3所示。
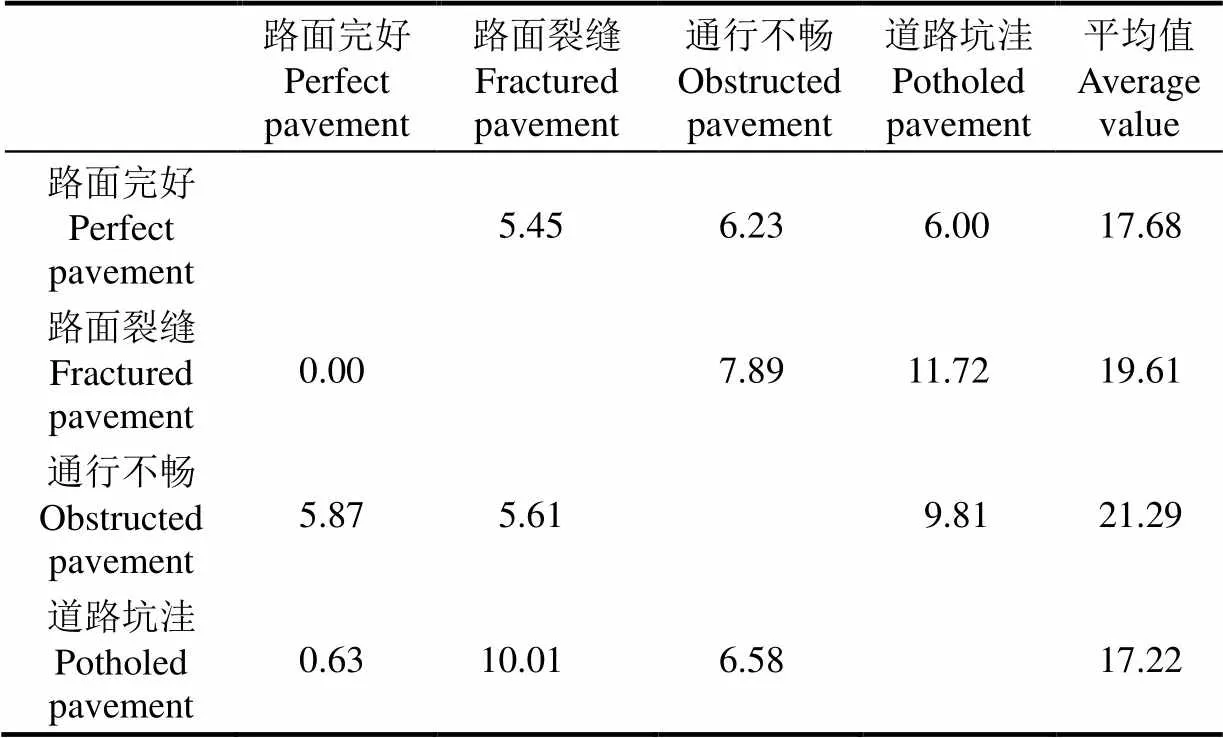
表2 田间道路分类结果误分率统计
由表2、表3可知,总体来看,研究区自动解译与目视解译的结果在整体分布趋势上较为一致,两者之间也存在着不一致的情况。其中较为明显的是道路SVM分类中道路完好的比例小于实际勘察中道路完好的比例,道路坑洼的比例高于实际踏勘中坑洼的比例;沟渠SVM分类中轻度淤塞的比例高于实际勘察中的比例,重度淤塞的比例小于实际踏勘中的比例。在道路分类中,通行不畅的误分率最高,为21.29%,其中,9.81%误分为道路坑洼,5.87%误分为路面完好,5.61%误分为路面裂缝。主要是在设定特征分类规则时,将其设定为道路两侧不规则纹理特征过多,导致通行不畅的分类与道路坑洼的光谱、纹理特征比较接近造成的。光谱与纹理特征的相似性同样导致了路面裂缝与道路坑洼的误分率较高,均超过了10%。在沟渠分类中,轻度淤塞的误分率最高,为29.26%,15.62%误分为重度淤塞,13.64%误分为轻度淤塞;其次是重度淤塞,误分率28.7%,其中21.11%误分为轻度淤塞,7.59%误分为通畅沟渠。
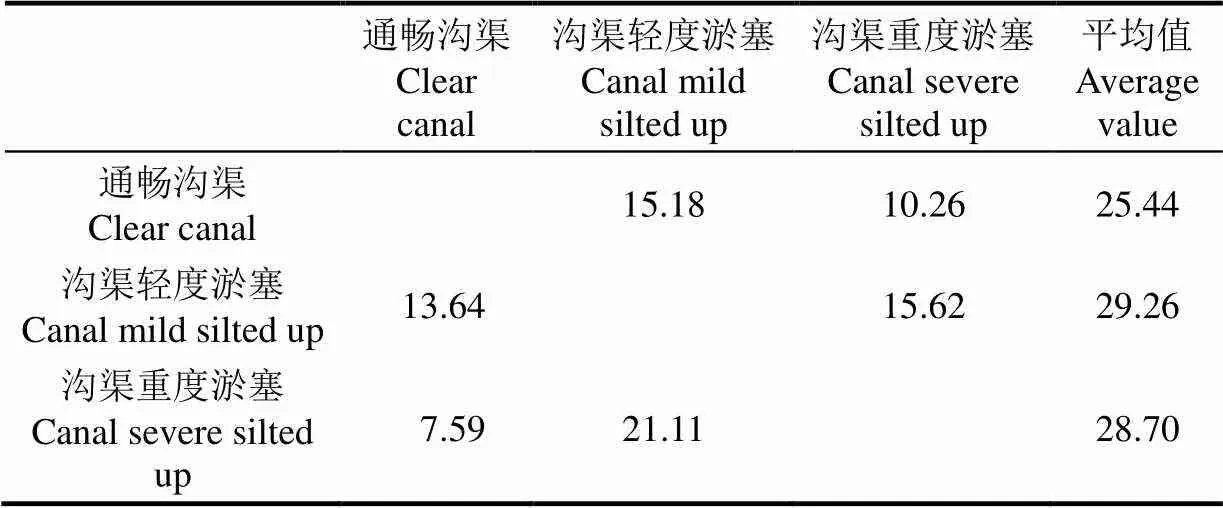
表3 沟渠淤塞分类结果误分率统计
根据实测结果,通过混淆矩阵计算所提取的道路、沟渠总体精度和交叉验证精度,结果见表4。

表4 田间道路与沟渠分类结果精度 Table 4 Accuracy of classification results of field roads and canals
由表4可知,在飞行高度300 m条件下(航线1),路面宽3 m的项目区田间道路利用状态的总体分类精度在80%左右,交叉验证精度在76%以上;上口宽2 m以上的沟渠淤塞情况的总体分类精度在70%以上,交叉验证精度在70%左右,对田间道路利用状态的判断的准确性优于对沟渠的判断。这些问题的出现可能与两者所依据原理不同造成,本研究中SVM分类主要从每个像元的图像特征出发,针对各像元分析其与训练样本之间的关系,从而对图像进行类型划分。实地勘察类似目视解译,更多是结合地表覆盖与纹理特征进行评价,不可避免的掺杂了研究者的主观判断。
为验证不同空间分辨率、整治工程等级对分类结果的影响,进一步对空间分辨率为0.1 m的研究区影像(航线2a获取)和2 m及以下宽度的田间道路、沟渠(航线2b获取)利用状况进行分类识别。基于同样方法进行要素特征分类,导入模型得到分类结果并结合实地勘察数据进行精度验证。结果显示,在空间分辨率提升的情况下(航线2a),田间道路(道路1、道路6)利用状况分类精度有所提升但不显著,沟渠通畅状况(沟渠1、沟渠4)分类精度无明显变化;而模型对宽度在2 m及以下道路、沟渠(道路9、沟渠7、8)利用状态识别结果较差(航线2b)。
4 讨 论
根据研究区田间道路和骨干沟渠特征分析和识别结果,通过通用无人机平台自带的彩色数码相机可用于土地整治基础设施建后利用监测。与高分卫星遥感相比,无人机平台成本低且受天气影响较小,且不受访问周期的限制,具有实时性的优点;本研究使用的小型电动无人机在使用过程中无需跑道或起落架,在大田地物调查中尤具优势,具有较高的适用性;同时,无人机航拍影像通过构建智能算法结合先验样本进行田间道路、沟渠状态识别,与实地勘察及目视解译相比,在监测成本和效率上具有优势。
由于遥感影像自身具有高度的复杂性和随机性,土地整治工程线状地物由于其光谱及纹理特征各异而显现出不同的特征。本研究针对土地整治项目区建设形成的骨干线性工程,在获取项目区无人机航拍影像的基础上,分析了基于遥感影像局部纹理特征结合监督分类方法识别整治项目基础设施利用状况的可行性,并进行了精度检验。该研究方法对于无人机遥感在土地整治监测中的应用具有一定的参考价值,但本研究中无人机航拍数据源较为单一,仅针对一景的可见光影像,缺乏多数据源的融合,而且目前分类仅能识别出某一影像单元内的使用状态,并将结果作定性输出,缺乏对基础设施使用状况的定量判断,还存在一些待改进之处。本研究依据BoW模型构建的SVM分类方法,在田间道路利用状态的总体整体识别精度达到80%以上,但沟渠淤塞状态的总体识别精度仅为70%左右,分类精度仍有较大提升空间。
分析误差产生原因,主要包括以下几个方面:1)由于训练样本是研究者人为选取,会存在经验、知识限制和盲区,从而造成所选择分类样本代表性可能尚不充分;2)由于影像本身造成的“异物同谱”现象,如在骨干沟渠分类中,水面与水面上植被光谱特征过于相似,同时沟渠水面上漂浮的其他杂物也可能干扰模型判别。针对以上误差来源,研究认为,在识别方法上,未来可以引入深度学习算法对训练样本纹理特征进行深度挖掘;在影像识别上,可以通过使用更高分辨率的相机和降低飞行高度,结合影像光谱信息,进一步提升分类精度。
5 结 论
本研究针对土地整治项目区建设形成的骨干线性工程,在获取项目区无人机航拍影像的基础上,分析了基于遥感影像局部纹理特征结合监督分类方法识别整治项目基础设施利用状况的可行性,并进行了精度检验。结果表明:
1)在晴朗无云,地势平坦条件下,利用可见光无人机遥感方法获取的影像精度在10~20 cm左右时可以初步分辨土地整治项目骨干设施的利用状态。以小型无人机航拍影像为数据源,提取可见光波段下的影像纹理特征信息,通过SURF特征匹配、-means聚类等算法,可实现对土地整治工程中具备一定宽度条件的线状地物使用状态的判别,并对其使用状态进行空间定位。
2)采用实地勘察及目视解译手段对基于纹理特征和SVM分类的田间道路、骨干沟渠使用状态判别结果进行评估,对比分析分类结果与实际结果的一致性。田间道路状态的总体分类精度在80%,骨干沟渠使用状态的总体分类精度在70%左右,对田间道路使用状态的判断的准确性优于对沟渠的判断。
3)通过比较SVM分类结果与实地勘察结果之间的一致性,结果显示研究区田间道路分类误差主要来自通行不畅与路面裂缝,骨干沟渠分类误差主要来自轻度淤塞。
4)比较不同精度下影像田间道路、骨干沟渠状态识别对分类精度的影响,发现空间分辨率提升情况下,田间道路利用状况分类精度有所提升但不显著,骨干沟渠通畅状况分类精度无明显变化,模型对宽度2 m以下沟渠分类精度较差。考虑到整治项目的工程类型和工程等级,可进行有效监测的主要是线性类型,一般宽度不宜小于2 m。
[1] 刘彦随,朱琳,李玉恒. 转型期农村土地整治的基础理论与模式探析[J]. 地理科学进展,2012,31(6):777-782. Liu Yansui, Zhu Lin, Li Yuheng. The essential theories and models of rural land consolidation in the transitional period of China[J]. Progress in Geography, 2012, 31(6): 777-782. (in Chinese with English abstract)
[2] 项晓敏,金晓斌,王温鑫,等. 供给侧结构性改革视角下的土地整治制度创新初探[J]. 中国土地科学,2017,31(4):12-21. Xiang Xiaomin, Jin Xiaobin, Wang Wenxin, et al. Institutional innovations of land consolidation from the perspective of supply-side structural reform[J]. China Land Science, 2017, 31(4): 12-21. (in Chinese with English abstract)
[3] 王玉莹,金晓斌,范业婷,等. 农村土地整治对促进农业现代化水平的影响分析[J]. 中国土地科学,2017,31(8):69-76. Wang Yuying, Jin Xiaobin, Fan Yeting, et al. The impact of rural land consolidation program on promoting the level of agricultural modernization[J]. China Land Science, 2017, 31(8): 69-76. (in Chinese with English abstract)
[4] 杨绪红,金晓斌,郭贝贝,等. 2006-2012年中国土地整治项目投资时空分析[J]. 农业工程学报,2014,30(8):227-235,294. Yang Xuhong, Jin Xiaobin, Guo Beibei, et al. Spatio- temporal differentiation of land consolidation investment in China form 2006 to 2012[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 227-235, 294. (in Chinese with English abstract)
[5] 唐秀美,潘瑜春,刘玉,等. 基于全过程的土地整治项目实施问题、成因及对策研究[J]. 中国土地科学,2018,32(3):35-42. Tang Xiumei, Pan Yuchun, Liu Yu, et al. Study on the problems, causes and countermeasures of land consolidation projects based on the whole process[J]. China Land Science, 2018, 32(3): 35-42. (in Chinese with English abstract)
[6] 张兵,崔系民,赵彦博,等. 基于High-1卫星影像的土地整治遥感监测方法研究与实践[J]. 农业工程学报,2015,31(20):225-233. Zhang Bing, Cui Ximin, Zhao Yanbo, et al. Method and application of remote sensing monitoring in land consolidation based on High-1 satellite image[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(20): 225-233. (in Chinese with English abstract)
[7] 罗开盛,李仁东,常变蓉,等. 面向对象的湖北省土地覆被变化遥感快速监测[J]. 农业工程学报,2013,29(24):260-267. Luo Kaisheng, Li Rendong, Chang Bianrong, et al. Dynamic monitoring land-cover change in Hubei province using object-oriented technology and remote sensing imagery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(24): 260-267. (in Chinese with English abstract)
[8] 徐秀云,陈向,刘宝梅. 微型无人机助力土地整治项目监管[J]. 测绘通报,2017(3):86-90.Xu Xiuyun, Chen Xiang, Liu Baomei. Using micro-UAVs for the land consolidation and rehabilitation projects supervision[J]. Bulletin of Surveying and Mapping, 2017(3): 86-90. (in Chinese with English abstract)
[9] 孟宪素,李少帅. 遥感技术在土地整理复垦开发项目监管工作中的应用实践[J]. 资源与产业,2009,11(2):66-70. Meng Xiansu, Li Shaoshuai. Application of RS in supervision over land consolidation and rehabilitation[J]. Resources & Industries, 2009, 11(2): 66-70. (in Chinese with English abstract)
[10] 吴健生,刘建政,黄秀兰,等. 基于面向对象分类的土地整理区农田灌排系统自动化识别[J]. 农业工程学报,2012,28(8):25-31. Wu Jiansheng, Liu Jianzheng, Huang Xiulan, et al. Automatic identification of irrigation and drainage system in landreclamation area based on object-oriented classification[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(8): 25-31. (in Chinese with English abstract)
[11] 许迪,李益农,蔡林根,等. 卫星遥感影像在农田灌排系统识别中的应用研究[J]. 农业工程学报,2004,20(2):36-39. Xu Di, Li Yinong, Cai Lingen, et al. Applied study of satellite image in identification of irrigation and drainage system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(2): 36-39. (in Chinese with English abstract)
[12] 郭云开,陈正阳,彭悦,等. 土地复垦工程的遥感评价[J]. 遥感技术与应用,2008,23(3):249-254.Guo Yunkai, Chen Zhengyang, Peng Yue, et al. Evaluation of land reclamation based on RS[J]. Remote Sensing Technology and Application, 2008, 23(3): 249-254. (in Chinese with English abstract)
[13] 张宏鸣,任强,韩文霆,等. 基于SVM的灌区无人机影像渠系提取[J]. 农业机械学报,2018,49(2):141-148.Zhang hongming, Ren Qiang, Han Wenting, et al. Extraction of irrigation networks of UAV orthophotos based on SVM classification method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 141-148. (in Chinese with English abstract)
[14] 韩文霆,张立元,张海鑫,等. 基于无人机遥感与面向对象法的田间渠系分布信息提取[J]. 农业机械学报,2017,48(3):205-214. Han Wenting, Zhang Liyuan, Zhang Haixin, et al. Extraction method of sublateral canal distribution information based on UAV remote sensing[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 205-214. (in Chinese with English abstract)
[15] 韩文霆,李广,苑梦婵,等. 基于无人机遥感技术的玉米种植信息提取方法研究[J]. 农业机械学报,2017,48(1):139-147. Han Wenting, Li Guang, Yuan Mengchan, et al. Extraction method of maize planting information based on UAV remote sensing technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 139-147. (in Chinese with English abstract)
[16] 陈天博,胡卓玮,魏铼,等. 无人机遥感数据处理与滑坡信息提取[J]. 地球信息科学学报,2017,19(5):692-701.Chen Tianbo, Hu Zhuowei, Wei Lai, et al. Data processing and landslide information extraction based on UAV remote sensing[J]. Journal of Geo-Information Science, 2017, 19(5): 692-701. (in Chinese with English abstract)
[17] 张雅文,许文盛,沈盛彧,等. 无人机遥感技术在生产建设项目水土保持监测中的应用:方法构建[J]. 中国水土保持科学,2017,15(1):134-140. Zhang Yawen, Xu Wensheng, Shen Shengyu, et al. Application of UAV remote sensing technology in monitoring of soil and water conservation for construction projects: The establishment of a method[J]. Science of Soil and Water Conservation, 2017, 15(1): 134-140. (in Chinese with English abstract)
[18] 王旭东,段福州,屈新原,等. 面向对象和SVM结合的无人机数据建筑物提取[J]. 国土资源遥感,2017,29(1):97-103. Wang Xudong, Duan Fuzhou, Qu Xinyuan, et al. Building extraction based on UAV imagery data with the synergistic use of objected-based method and SVM classifier[J]. Remote Sensing for Land & Resources, 2017, 29(1): 97-103. (in Chinese with English abstract)
[19] 牛亚晓,张立元,韩文霆,等. 基于无人机遥感与植被指数的冬小麦覆盖度提取方法[J]. 农业机械学报,2018,49(4):212-221. Niu Yaxiao, Zhang Liyuan, Han Wenting, et al. Fractional vegetation cover extraction method of winter wheat based on UAV remote sensing and vegetation index[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 212-221. (in Chinese with English abstract)
[20] 张超,王志浩,杨建宇,等. 基于Canny算子的农田线状工程地物自动提取方法[J]. 农业机械学报,2015,46(2):270-275. Zhang Chao, Wang Zhihao, Yang Jianyu, et al. Farmland linear project feature auto-extraction method based on Canny algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 270-275. (in Chinese with English abstract)
[21] 赵晓庆,杨贵军,刘建刚,等. 基于无人机载高光谱去空间尺度优化的大豆育种产量估算[J]. 农业工程学报,2017,33(1):110-116. Zhao Xiaoqing, Yang Guijun, Liu Jiangang, et al. Estimation of soybean breeding yield based on optimization of spatial scale of UAV hyperspectral image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(1): 110-116. (in Chinese with English abstract)
[22] Heras L P, Ramos Terrades O, Llados J, et al. Use case visual Bag-of-Words techniques for camera based identity document classification[C]//Document Analysis and Recognition (ICDAR), 2015 13th International Conference on. IEEE, 2015: 721-725.
[23] 孙山,基于BoW模型的图像分类方法研究[D]. 合肥:安徽大学,2016. Sun Shan. Research of Image Classification Method Based on BoW Model[D].Hefei: Anhui University, 2016. (in Chinese with English abstract)
[24] 李培鹏. 基于空间词袋模型的图像分类[D]. 长春:吉林大学,2014. Li Peipeng. Image Classification Based on Bag-of-words With Spatial Information[D]. Changchun: Jilin University, 2014. (in Chinese with English abstract)
[25] 胡同喜,牛雪峰,谭洋,等. 基于SURF算法的无人机遥感影像拼接技术[J]. 测绘通报,2015(1):55-58.Hu Tongxi, Niu Xuefeng, Tan Yang, et al. Unmanned aerial vehicle images mosaic based on SURF algorithm[J]. Bulletin of Surveying and Mapping, 2015(1): 55-58. (in Chinese with English abstract)
[26] 陈洋波,张涛,窦鹏,等. 基于SVM的东莞市土地利用/覆被自动分类误差来源与后处理[J]. 遥感技术与应用, 2017,32(5):893-903. Chen Yangbo, Zhang Tao, Dou Peng, et al. Error sources and post processing method for land use/cover change estimation of Dongguan City based on Landsat remote sensing imagery with SVM[J]. Remote Sensing Technology and Application, 2017, 32(5): 893-903. (in Chinese with English abstract)
[27] 张锦水,何春阳,潘耀忠,等. 基于SVM的多源信息复合的高空间分辨率遥感数据分类研究[J]. 遥感学报,2006,10(1):49-57. Zhang Jinshui, He Chunyang, Pan Yaozhong, et al. The high spatial resolution RS image classification based on SVM method with the multi-source data[J]. Journal of Remote Sensing, 2006, 10(1): 49-57. (in Chinese with English abstract)
[28] 欧阳玲. 基于遥感和SVM模型的松嫩平原南部耕地质量评价[D]. 北京:中国科学院大学,2017. Ouyang Ling. Cultivated Land Quality Evaluation Based on Remote Sensing and SVM Model of South Songnei Plain[D]. Beijing: University of Academy of Science, 2017. (in Chinese with English abstract)
[29] 范业婷,金晓斌,项晓敏,等. 农用地整治对产能影响的特征预测及评估:方法与实证[J]. 地理研究,2016,35(10):1935-1947. Fan Yeting, Jin Xiaobin, Xiang Xiaomin, et al. Prediction and evaluation of characteristic of agricultural productivity change influenced by farmland consolidation: Method and case study[J]. Geographical Research, 2016, 35(10): 1935-1947. (in Chinese with English abstract)
[30] 国家质量监督检验检疫. GB/T 30600-2014,高标准农田建设通则[S]. 北京:中国国家标准化管理委员会,2014.
Monitoring roads and canals utilization condition for land consolidation project based on UAV remote sensing image
Gu Zhengming1, Jin Xiaobin1,2,3※, Yang Xiaoyan4, Zhao Qingli4, Jiang Yuchao1, Han Bo1, Shan Wei1, Liu Jing1, Zhou Yinkang1,2,3
(1.210023,; 2.210023,; 3.210023,; 4.100035,))
The infrastructure in land consolidation projects provide important guarantee for harvest and natural calamities resistance to farmers directly, it is fundamental for rural social and economic development. However, some facilities in land consolidation projects cause problems such as fractured pavement or canal silted up after construction, which can bring negative effects to agricultural production. So it is important to find an effective and reliable technical method to monitor and evaluate the effects of land consolidation projects. Unmanned aerial vehicle (UAV) remote sensing is widely used in feature recognition, roads and canals collection and crop productivity evaluation during recent years, but it is rarely used to evaluate the quality of the infrastructure of land consolidation. To objectively monitor and effectively evaluate the post-construction utilization of the infrastructure in land consolidation projects, this paper selected typical land consolidation projects, used the multi-rotor UAV for aerial photography test to obtain high-resolution aerial images, and put forward the complete technical method and operational procedures for monitoring and evaluation of land consolidation infrastructure. Route 1 covered the whole study area. Route 2a mainly took pictures on main field roads and canals for precision shooting, and route 2b focused on roads and canals due to their width were less than 2 m. After image processing, this paper gained image grids of field roads and canals which were wider than 2 m, then selected BoW (bag of words) model to build a sample feature database of surface features, including the pavement diseases and canal silted up such as fractured pavement, obstructed pavement, potholed pavement, canal mild silted up and canal severe silted up. The BoW model included speeded-up robust features (SURF) algorithm for image characteristic representation, and image visual dictionary for local feature clustering. Finally this paper used SVM (support vector machine) to classify the images. The results showed that: UAV remote sensing could monitor and locate the condition of infrastructure post-construction utilization under sunny and cloudless days. Using the method introduced in this paper and combined with the visual interpretation and field survey, the total accuracy rate of field roads reached 80%, and the total classification accuracy rate of canals was about 70%. The cross accuracy rate of field roads and canals was about 70%. The main problem of infrastructure post-construction utilization in the study area was the road obstruction and mild silted up of the canals caused by delayed management and maintenance. After monitoring, this paper analyzed the causes of the differences of monitoring ratio between field roads and canals, and especially explained the causes of the lower monitoring ratio of canals in details. They were as follows: first, the training samples may not match the actual objects in the maps, which caused the extracted information of blocked canals incomplete; second, the spectral information of vegetation and canal water shared the same characteristic in the visible-band image, which might interference the model. This paper also used higher resolution image and linear infrastructure under 2 m to validate the reliability of the model. Route 2a was used to validate the classification accuracy due to the image resolution was higher. Route 2b was used to validate the classification accuracy due to the linear infrastructure width was under 2 m. We found that the overall accuracy of linear infrastructure increased insignificantly while the image resolution higher, meanwhile the overall accuracy of linear infrastructure decreased remarkably when the road and canal width was less than 2 m. During the process of UAV remote sensing for monitoring linear infrastructure post-construction utilization such as field roads and canals of land consolidation projects, we can use the high-resolution image efficiently in sunny and cloudless condition, and at the same time there is still much room for improvement.
unmanned aerial vehicle; remote sensing; models; land consolidation; infrastructure
顾铮鸣,金晓斌,杨晓艳,赵庆利,蒋宇超,韩 博,单 薇,刘 晶,周寅康. 基于无人机遥感影像监测土地整治项目道路沟渠利用情况[J]. 农业工程学报,2018,34(23):85-93 doi:10.11975/j.issn.1002-6819.2018.23.010 http://www.tcsae.org
Gu Zhengming, Jin Xiaobin, Yang Xiaoyan, Zhao Qingli, Jiang Yuchao, Han Bo, Shan Wei, Liu Jing, Zhou Yinkang. Monitoring roads and canals utilization condition for land consolidation project based on UAV remote sensing image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 85-93. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.23.010 http://www.tcsae.org
2018-06-08
2018-09-19
国家科技支撑计划项目(2015BAD06B02)
顾铮鸣,博士生,主要从事土地利用与规划研究。 Email:dg1627006@smail.nju.edu.cn
金晓斌,教授,博士,博士生导师,主要从事土地利用与国土整治研究。Email:jinxb@nju.edu.cn
10.11975/j.issn.1002-6819.2018.23.010
P23; S28
A
1002-6819(2018)-23-0085-09
猜你喜欢
科教新报(2023年13期)2023-08-15 10:18:52
江苏安全生产(2022年3期)2022-04-19 10:47:16
四川劳动保障(2021年8期)2021-12-02 02:13:28
魅力中国(2021年50期)2021-11-30 03:16:04
今日农业(2021年8期)2021-11-28 05:07:50
今日农业(2021年2期)2021-03-19 08:36:20
四川劳动保障(2021年7期)2021-01-30 18:38:03
金桥(2020年9期)2020-10-27 01:59:34
水利技术监督(2017年6期)2017-12-19 13:28:16
环境保护与循环经济(2017年10期)2017-03-16 03:16:20