数字控制Buck变换器的Simulink仿真
2018-11-22 02:23:52安徽理工大学张林青张玉全
电子世界 2018年21期
安徽理工大学 张林青 张玉全
本文针对buck变换器进行了建模,并对此buck电路采用了离散控制器,利用Matlab/Simulink进行了建模及仿真,仿真结果证明了buck变换器模型和离散控制器设计的正确性。
1 引言
传统电力电子变换器常用模拟控制方法,但由于数字控制有很多优点,电力电子变换器越来越多地采用数字控制,所以有必要对数字控制进行研究。
本文首先对buck变换器主电路进行了建模,然后设计出控制电路z域控制器,并在Simulink中进行了电路仿真。
2 电路的模型
2.1 buck主电路的模型
主电路参数取为:Vin=5V,期望输出电压Vout=1.6V,最小负载电RL=0.1ohm,PWM频率fpwm=250kHz,电压采样频fs=250kHz。输出滤波器参数:L=1.0uH,C=1620uF,Rc=0.004Ohm。buck电路结构如图1所示。
由电路原理可推导出buck主电路系统公式:

其中iL为电感电流。Vg为占空比,Vout为输出电压,Vc为电容电压,iout为输出电流。
以上式子在simulink中的仿真模型如图2所示,(此模型作为子系统被封装到图3中的“buck converter1”模块中):
2.2 离散控制器模型
离散控制器可将传统模拟控制器离散化得到,所以首先设计出模拟控制器。
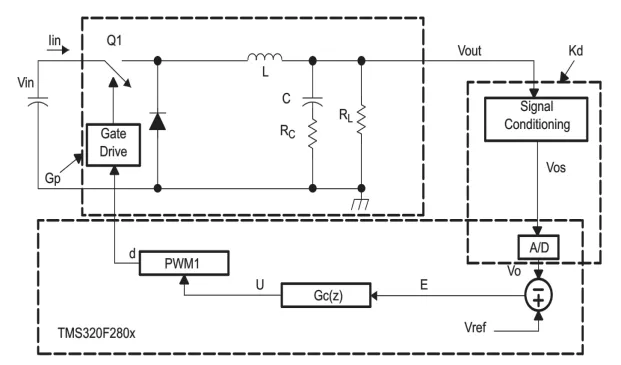
图1 buck变换器的结构

图2 buck变换器主电路的simulink模型

图3 buck变换器的数字控制模型
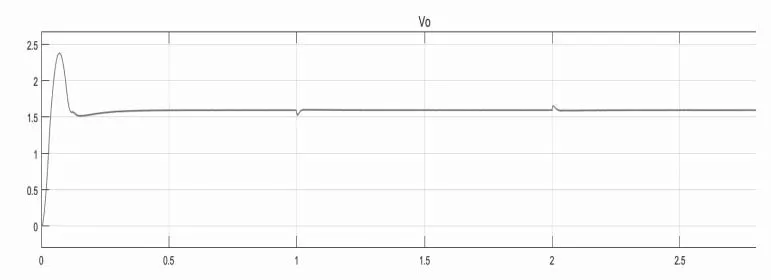
图4 输出电压波形
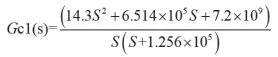
1)利用传统模拟控制器设计方法设计得到此Buck电路的控制器s域表达式如下(Shamim Choudhury.Designing a TMS320F280x Based Digitally Controlled DC-DC Switching Power Supply.TEXAS INSTRUMENTS,2005):
2)利用MATLAB的“c2d”函数将上式的模拟控制器离散化得到数字控制器,所得数字控制器的z域表达式如下:

3 仿真模型
模型如图所示其中包含了buck主电路、离散控制器模块、数字PWM,A/D变换器。并加入了动态负载“step load”模块,以观测电路的动态性能(Introduction to MATLAB/Simulink for witched-mode power converters.Colorado Power Electronics Center University of Colorado)。buck变换器的数字控制模型如图3所示。
4 仿真结果及结论
图4所示为仿真结果,从输出电压Vo的波形可以看出:电压稳定在1.6v左右,刚好与期望输出电压相同,且在仿真的第1秒时刻,从电路中切掉动态负载,2秒时刻重新加入此负载,此时电路仍能保证良好的控制作用。
仿真结果证明了buck主电路模型、离散控制器模型设计的正确性,我们可以根据此电路及控制器参数进行实际电路设计,例如:可采用DSP作为控制器实现此电路的控制。
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02
卫星应用(2022年3期)2022-05-23 13:44:30
卫星应用(2022年1期)2022-03-09 06:22:20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
环球慈善(2019年6期)2019-09-25 09:06:24
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
电子制作(2016年15期)2017-01-15 13:39:26
电子器件(2015年5期)2015-12-29 08:43:46
电子器件(2015年5期)2015-12-29 08:42:59