
SOLO模型在信息技术教学中的应用研究(上)
2018-11-22 02:22王蕾江苏省南京市琅琊路小学
中国信息技术教育 2018年22期
王蕾 江苏省南京市琅琊路小学
教学现场
SOLO模型在许多学科中已有了一定的应用,随着信息技术学科核心素养的出台,有关思维的关注度也出现在信息技术学科教研活动中,如何合理设计教学,以满足思维培养的需要,是教学研究的重点。
问题分析
SOLO模型是对观察到的学习结果进行分类的理论框架,包括思维方式和复杂性水平两个关键特征。SOLO模型将皮亚杰认识发展理论的认识主体扩展为存在差异性的学生个体,同时考虑学生学习的质变和量变,对于科学设置课程目标以及教学评价具有重要的启示。本文即针对以上问题,展开相应的探讨。
● SOLO模型的理论解析
SOLO模型即分类评价理论,全称“Structure of the Observed Learning Outcome”,意为:可观察的学习结果的结构。SOLO分类评价理论是香港大学教育心理学教授比格斯(J.B.Biggs)首创的一种学生学业评价方法,是一种以等级描述为特征的质性评价方法。SOLO分类评价理论旨在针对学习过程进行动态评价,在教学中经历多次实验后,形成了相对稳定的思维评价方式。
SOLO模型由功能性思维方式和复杂性水平这两个关键特征组成。其中功能性思维方式包括:感觉运动的思维方式——人们对物理环境的反应;表象的思维方式——人们以图像的形式内化动作;具体符号的思维方式——通过使用如书面语言和数字这样的符号系统思考,该模块是小学高年级和中学最常见的教学目标;形式的思维方式——考虑更加抽象的概念,依据“原理”和“理论”工作,学生不再局限于一个具体的参照物;超形式的思维方式——能够质疑或挑战理论或学科的基本原理。
● SOLO模型的层次分布
比格斯按思维结构的复杂程度将学生思维发展划分为五个层次:
前结构层次:学生基本上无法理解问题和解决问题,只提供了一些逻辑混乱、没有论据支撑的答案,此思维过程指向学生的低层思维阶段,尚无完整的思维连接,处于凌乱的感受知识阶段,需要教学者提供更为明晰的学习机会。
单点结构层次:学生找到了一个解决问题的思路,但却就此停住,单凭一点论据就跳到答案上去。此思维过程指向学生的初步思维阶段,认知过程刚刚开启,但是学生的自我认知能力有限,需要教学者辅助保证思维过程的深入。
多点结构层次:学生找到了多个解决问题的思路,但却未能把这些思路有机地整合起来。此思维过程指向学生的初步构建阶段,学生已经具有一定深度的思维,需要教学者提供更丰富的内容来触发思维的广度。
关联结构层次:学生找到了多个解决问题的思路,并且能够把这些思路结合起来思考。在此过程中,学生可以进行一定层次的自我归纳和知识构建,需要教学者及时督促鼓励其继续深入思考,向着更高层次的思维进阶。
抽象拓展层次:学生能够对问题进行抽象的概括,从理论的高度来分析问题,而且能够深化问题,使问题本身的意义得到拓展。此过程为学习过程的高级阶段,学生的思维过程已经到达自我内化吸收的阶段,需要教学者提供反思和整合的机会,巩固其学习成果。
● 信息技术教学中SOLO模型的研究现状及可行性分析
长期以来,信息技术教学中关注对学习结果的评价,以学生对技能的掌握程度及最终的电子作品的达成率来考查学习效能,缺乏对思维的评价。而通过SOLO模型,能对信息技术学科的学习结果进行思维层次的评价,将学习结果中的思维过程进行量化,用以客观地评价学习情况。通过对学生表现出的不同作品形式,判断其思维过程处于哪一个层次,并对教学过程进行动态调整。如学生处于前结构层次,证明教学难度过大,就需要进行降层处理;如学生处于单点结构层次,就需要提供更为丰富的学习资源,加强基础概念的训练;如学生处于多点结构层次,说明已对概念有了初步的认知,应补充扩展性的内容加深理解;如学生已经进入关联结构层次,教师要及时补充外延内容,拓展学生的知识链接;如学生已经进入抽象拓展层次,则较为成功地完成了该内容的完整认知概念,可以引导其加深对学科整体知识的构建。
本文据此展开相应的研究,因限于篇幅,本篇为研究文章的上篇,重点关注前结构层次和单点结构层的评价方式,在下篇中关注另三种层次的评价方式。
● 基于SOLO模型的信息技术教学过程
1.深入理解知识原点:加深前结构层次
在前结构层次中,学生并没有真正理解学习内容,更多的是被动接受技能训练,或被以前所学的无关知识困扰,找不到任何解决问题的办法。表现在信息技术学习中,呈现出学习动机不强、参与度不高的情况。在此情况下,教师需要及时进行相应的调整,激发出学生适宜的思维动力。
(1)原设计
《认识键盘》是小学信息技术计算机基础模块部分的内容,也是传统教学中常见的内容。常规教学中,教师一般采用“讲练结合”的方式,带着学生依据实物来认识键盘的分区,再根据一定的教学软件来练习基本指法。在此种情况下,教学主要是技能的训练,没有设计的痕迹,学生对本课兴趣索然,课堂气氛往往过于沉闷。
(2)思考焦点
由于该课处于信息技术的起始学段,学生前认知中,尚无学习需要。在常规的教学过程中,教学过程类似于技能练习,再机械模仿代替了认知思考,因此在以上惯性的教学中,学生对认识键盘的学习动机未能有效激发,因此出现了课堂气氛沉闷、教学效果不理想的情况。
(3)改进型设计
南京市某小学的朱老师执教的《认识键盘》一课中,就将“掌握backspace、空格键、回车键的作用和使用方法”这一教学目标进行了有规划的理解深入,让原本枯燥的认识键盘的活动变得生动有趣。
师:老师准备了一组闯关游戏,愿意接受挑战吗?好,请大家跟老师一起打开记事本吧。
学生在教师的指导下,打开记事本。(课件出示:第一关)
师:你们能快速输入这行英文短语吗?
学生在记事本里输入教师准备好的生日快乐的字符。
师:成功的同学请举手。在输入的过程中,你们遇到什么困难了吗?解决了吗?怎么解决的?
生1:空格键(师贴空格键)。
师:这是键盘上最长的一个键,在主键盘的最下面。你们知道这个键的位置吗?互相指指看!
生2找出了Enter键。
师:Enter中文名字叫回车键,具有换行的功能。
生3找出了Backspace。
师:Bockpca中文名字叫退格键,删除光标前的字符(举例操作示范)。
学生再次调整第一关的补充内容。
师:这次有没有遇到什么困难?解决了吗?怎么解决的?
生1:不能输入大写字母。
师:有同学能解决这个问题吗?
生:输入H之前先按一下Caps Lock,就可以输入大写字母了。
师:你能描述一下这个键吗?靠近哪个字母?大家都知道这个键的位置吗?互相指指看!
请大家反复地击打这个Caps Lock控制键,注意观察键盘上有什么变化。击打这个键时,有两种状态,请大家在这两种状态下分别地输入几个字母,看看有什么不同。
生:灯亮时,输入的是大写字母;灯灭时,输入的是小写字母。
教学评析:在以上教学过程中,教师将原本机械的认识键盘分区,变为了带着学生去玩闯关游戏。在闯关的过程中,将键盘的主要功能键设为发现点,学生一一探究,找到问题的解决方案,在此过程中,不断加深对键盘功能键的认识,通过不同方向的反馈,对知识原点进行多项巩固。这样的形式,既解决了学生认知程度不够深入的问题,又能保持学生自始至终的学习动机,因此课堂教学效果较好。
2.拓展思维广度:丰富单点结构层
在单一结构水平层次,学生在信息技术学习中能够学习内容,找到一个解决问题的办法。在该层次中,学生的思维已经进入一定的层次,能够找到初步的求解方案,但是缺乏多途径的认知方式,尚缺乏运用知识的能力。因此,教师需要给学生提供更为丰富的资源,帮助其拓展思维广度。
(1)原设计
《学会设计规划路线》是小学三年级轻质机器人行走的内容,要求在前面学习的基础上,为轻质机器人设计完成任务的多条路线,解决编写程序过程中“当距离大于某一距离时”机器人如何安排路径的问题,让学生初步感知速度和时间的关系。常规设计中,一般采用“设置起点和终点→教师讲解机器人行走方式→讲授机器人模块的编写方法→学生操作实践→教师辅导纠正错误→总结实验过程”。在实际教学过程中,学生按部就班,能够模仿教师进行操作,但是作业形式单一,缺乏自我的创意。
(2)思考焦点
在以上的学习过程中,学生思维过程处于单点结构层,缺乏必要的深度思考的空间,加之缺少必要知识供给,导致思维难以深入。为了帮助学生进入高阶思维的层次,教师需要适时地提供更为具有适应性的资料,为学生创设学习迁移的机会。
(3)改进型设计
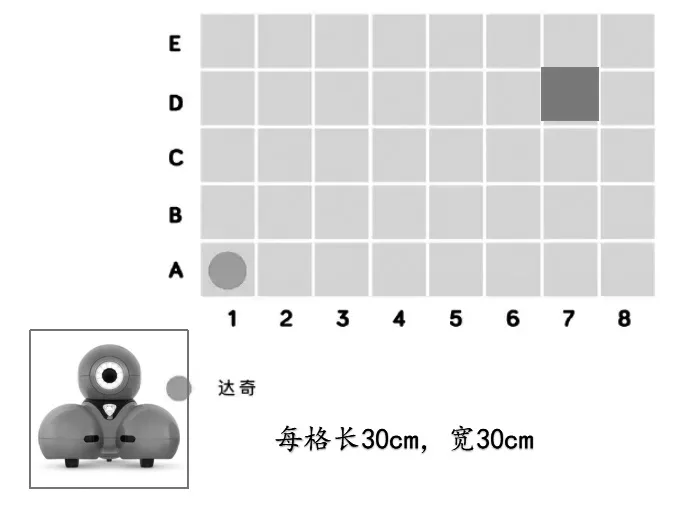
南京市某小学部王老师近期执教的《宇航员达奇》一课中,为学生提供多项引导资源,丰富学生思维空间,收到了良好的教学效果:
(复习前节课的机器人行走内容)
步骤一:化简中求解。
师:在编写程序的过程中,有没有遇到什么困难?
生1:在按照向上移120cm,旋转90°,向右移180cm的路线编程时,我的机器人卡壳了。
生2:在向上移动到120cm,编程时却发现移动到最远的距离是80cm。
师:你们是怎么解决这个问题的?
学生讨论后,教师给出参考建议。
生1:转弯走,在一条路走不通的时候,我们可以换条路。
生2:可以把它分成两段来完成,移动到80cm,移动到40cm。
师:把复杂的问题简单化,这也是一种方法。
步骤二:优化方案求解。
师:今天我教大家一种新的方法,认识这个图标吗?(板书 移动指令)
我们来找一找,它在什么位置。我把它拖到上面来。你们能用自己的话来说说是什么意思吗?
每秒钟走多少厘米,假设我每秒钟走40cm,那么1秒钟,我可以走多远呢?
学生说出检测到的数值。
师:我们回到达奇的任务上,现在我们就沿这条路线走。向上移动到120cm,旋转到90°,向右移动到180cm。达奇以30cm/s的速度前进,需要几秒移动到最上端?
学生回答如何能移动到位。
教师继续追问:为什么?
生:30×4=120cm,共有120cm,所以需要4s。
教师归纳:每个格子长宽均是30cm,达奇以1s走30cm的速度前进,走一个格子需要1s,那么走四个格子需要4s。(板书)
教师提供第二轮学习资料:下一个指令是右转90°(板书),这样的情况下,机器人继续前进,速度还是30cm/s,需要几秒钟能到达绿洲?(板书)
学生探究学习素材,并进行讨论。
教师提供第三轮学习资料:最后一个指令是,我们让达奇停下来。(板书)
学生根据提示找到最优路径。
师:我们看一下在达奇Wonder里程序怎么写。拖出“移动”指令,设好速度,然后下一个指令是旋转到90°,那我在“移动”和“旋转到”中间的位置改时间。划动屏幕,找到需要的时间。
下面谁来帮我补充完整这段程序?
学生帮助教师补充程序资料。
好,下面请大家重新编写程序,然后到场地上去测试。
顺利到达绿洲的组,在黑板上任务2处,你们组的位置打“√”。
提前完成的组,试着修改一下程序,让达奇用更短的时间到达绿洲。
步骤三:感知速度和时间的关系。
集体演示:我们一起到前面来看一看这一个组的程序,他们移动的速度是60cm/s,注意观察移动的效果(如下图)。
结论:机器人走同样的距离,速度快了,时间用得更少了。
教学评析:本课的设计,突破了单一路径的限制,将教学重点从解决行走,变为怎样能更好地行走,所有的指令和规划都围绕求解的路径展开。在本课之前,学生已经学会使用软件的基本操作方式,熟悉“移动到”“旋转到”指令,能够连接指令形成完整程序,并连接达奇机器人运行程序。因此在教师采用分步给出学习资料,促发学生多样式地思考自我的学习过程,并最终找到多种解决方式。在此思维过程中,学生的活动不是自我的单一认知,而是依靠教师的资源供应进行深层的自我规划和设计,让整体思维呈现出积极主动的状态,保证了良好的教学效能。
本文系SOLO模型在信息技术教学中的应用研究的第一部分,通过具体案例的分析,厘清了信息技术学科中前结构层次和单点结构层的应用模式,及思维层次的有效推进方式。SOLO模型共分为五个层次,在下一期的专栏文章中,将对多点结构层次、关联结构层次、抽象拓展层次在信息技术学科中的应用形式进行相关阐述。
猜你喜欢
消费电子(2022年6期)2022-08-25
导航定位学报(2022年4期)2022-08-15
中学生学习报(2022年18期)2022-05-07
小天使·三年级语数英综合(2022年4期)2022-04-28
建材发展导向(2022年1期)2022-03-08
甘肃教育(2021年10期)2021-11-02
甘肃教育(2020年24期)2020-04-13
中国(俄文)(2019年6期)2019-11-22
电脑报(2019年40期)2019-09-10
汽车导报(2017年5期)2017-08-03
