AGV技术在物料运输产线的设计与应用
2018-11-21 19:14王昱山于青
科学与财富 2018年29期
关键词:机械臂
王昱山 于青

摘要:介绍了AGV在物料运输产线的设计与应用,并依据实际案例设计了AGV系统,其主要由AGV小车、料架、导航磁条和控制系统组成。通过AGV与机械臂的配合应用,从而替代原有的人工搬运及辊子输送的方式,取得了良好的使用效果,为后期的信息化升级提供基础。
关键词:AGV;机械臂;物料运输
随着“中国制造2025”宏大计划的提出,我国制造业正在飞速发展,整体制造水平显著提升。但是,目前传统制造企业的升级改造也面临着诸多问题,如传统流水线生产方式,一旦投产无法短期改变,并且随着年时增加,成本逐渐提升,并且占地面积较大,位置固定,很难对其设备单一进行更换。
AGV技术的出现就有效的改变了传统物料运输的弊端,AGV(Automated Guided Vehicle)即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。AGV的活动区域无需鋪设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性,实现高效、经济、灵活的无人化生产。
下面以某钻头生产厂为例,以AGV技术为基础对其物料运输产线进行设计研究。
1.物料产线基本信息
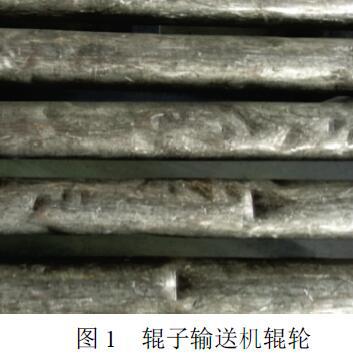
此钻头产线是通过辊子输送的方式将钻头运送到干式喷砂机后通过人工搬运至干式喷砂机进行干喷,再人工搬回辊子输送机,运往液体喷砂机。原辊子输送机的辊轮由于年时较长,以严重损坏,影响正常使用,如图1所示。并且,传统的人工搬运方式,增加劳动力成本,无法确保操作人员安全、生产效率很低。
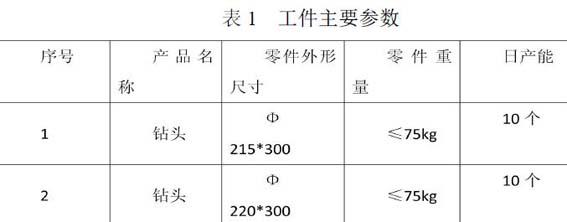
现针对此产线进行智能化升级改造,主要工件参数如表1。
产线主要设备为干式喷砂机两台,液体喷砂机一台。产线工艺为先进行干式喷砂,处理周期约30分钟;之后进行湿式喷砂,处理20分钟;检验合格品之后运输到烧结区。
2.产线技改总体设计方案
2.1工艺流程助力臂抓取——AGV转运——干喷——湿喷——人工检测——下一个车间
2.2总体设计方案
输送线全线长度20米,采用助力臂将钻头装入料架。AGV接收料架通过控制系统传递信号,运行至干式喷砂机1旁,人工助力臂抓取1个或多个钻头放置其旁,将其中一个钻头抓置至干式喷砂机进行干喷。 AGV运行至干式喷砂机2同样操作后AGV返回干式喷砂机1等待。30min后AGV将分别接收干喷后的2个钻头送至湿式喷砂机旁,20min后经人工检测,AGV将合格品运送到烧结车间内,AGV返回干式喷砂区继续等待,重复以上过程。
2.3平面设计图
3.产线技改系统构成
3.1系统构成
产线系统主要由AGV自动转运系统和助力分料系统组成。
3.2 AGV自动转运系统
AGV自动转运系统如图()所示,主要由AGV小车、料架、导航磁条和控制系统组成。AGV小车为双向背负式AGV。其主要参数如表2设计料架上料盘可垂直放置12个钻头,钻头被助力臂分拣到料架上,控制系统传递信号给AGV,AGV行至料架下方顶起料架,沿着导航磁条运行。
3.2助力臂分料系统
助力臂分料系统通过助力臂本体、端部夹具装置组成,助力臂本体为全气动助力机械臂,重物在提升或下降时形成浮动状态,靠气路保证极低的操作力,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置。夹具端部可以卡住钻头头部,完成分料任务,将钻头拣入拣出料框,或将待钻头放置至指定位置。其主要参数如表3所示。
表3 助力臂主要参数
4 结束语
通过AGV小车加助力臂的方式替代原有的人工和滚筒送料的方式,将此系统行程自动化产线,节约现有产线人工80%,生产节拍提高27%。通过对框架的设计,对后期自动化乃至智能化改造提供了强有力的条件。随着我国智能化水平不断提升,中国制造必将大展辉煌!
作者简介:王昱山,男,(1986-),机械设计制造及其自动化,主要方向:智能工厂、智能车间的设计及实施。
于青(1986-),女,天津人,管理学硕士,工学硕士,机械电子工程师,研究方向:云制造、企业管理、智能工厂。
猜你喜欢
科技与创新(2016年23期)2017-03-30
中国科技纵横(2017年3期)2017-03-29
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
物联网技术(2017年2期)2017-03-15
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
物联网技术(2014年4期)2014-04-19