合成孔径雷达图像水体目标的提取
2018-11-21 06:32:24贺飞跃贺兴时丁小丽刘婷婷
电光与控制 2018年11期
贺飞跃, 贺兴时, 丁小丽, 刘婷婷
(西安工程大学理学院,西安 710048)
0 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式微波传感器,由于其全天时、全天候等特点而得到了日益广泛的应用[1-3]。SAR图像中水体目标的提取是目标识别、环境监控和洪水灾害监测等领域的重要内容。SAR图像中的水体具有典型的特征:其表面因具有镜面反射特征而呈现为分布均匀的低强度区域;由于SAR图像固有的斑点噪声及波浪、植被倒影等影响,水域表面会出现一定程度的明暗变化;尤其是在水陆结合部常表现为边缘的模糊性和不确定性。这些特征给水体的精确提取造成了较大的困难。一些应用于光学图像处理比较有效的方法一般不能直接应用于SAR图像水体的处理[4-5]。目前常用于水体提取的方法是基于阈值的分割方法[6-10],该方法具有简单快速的优点,但如何确定合适的阈值及边缘的精确定位是一个难题。活动轮廓方法[11-13]是SAR图像水体目标提取的另一类常用方法,这类方法能得到光滑封闭的目标轮廓曲线,但计算复杂度高、适应性差,对复杂场景分割效果不佳。
SAR图像水体提取的首要问题是水体目标的识别问题。一般情况下可以将分割图像中具有较低强度的一类看作是水体目标[7-9],但往往需要做一些后处理以剔除虚警目标[9-13],这些后处理往往比较复杂,剔除的标准难以控制。为此,本文利用SAR图像中水体目标具有较低的强度及较好的均匀度的特征,结合分水岭过分割的特点[14-15],将分水岭分割图像中较大的区块作为水体的种子区域,再通过区域生长[16-18]方法来获取水体的初始轮廓。
消除SAR图像中水体目标边缘模糊导致的不确定性是另一个需要解决的问题。常用方法是在预处理时使用那些能保持边缘特征的滤波方法,如Shearlet变换[12]、Lee滤波方法[18]等,然后利用数学形态学进行后处理[6,19-20]。该方法能使水体目标边缘较平滑,但腐蚀算子所得边缘信号较强,抗干扰性不足,而膨胀算子得到的边缘信号较弱,易出现边缘模糊现象。MRF由于融合了图像的灰度信息和上下文信息,是SAR图像消除边缘模糊的有力工具[21-22]。针对水体目标边缘定位问题,本文提出了融合观测图像灰度统计信息的MRF模型,以对水体目标进行精确提取。
1 水体目标的初始提取
1.1 分水岭方法
分水岭方法是一种基于拓扑理论的数学形态学分割方法,其基本思想可以通过模拟浸入过程来说明。假设在每个区域最小值的位置上打一个洞,并且让水以均匀的上升速率从洞中涌出,从低到高淹没整个地形。当处在不同集水盆中的水将要聚合在一起时,修建大坝以阻止其聚合,水将只能达到大坝的顶部处于水线之上的程度。不同的集水盆代表图像的不同分区,大坝的边界对应分水岭的分割线,实现对图像的分割。在SAR图像中,水体表现为连通的均匀的低强度区域,在分水岭分割图像中表现为较大的区块,这些较大的区块即可作为水体的种子区域。而其他区域由于乘性斑点噪声和杂波的影响,图像中包含大量局部极小值,在分水岭分割图像中表现为大量密集的小斑块。
1.2 区域生长
区域生长是挑选具有相似性特征的像素点,并将其合并为区域的过程。具体步骤是先从目标区域中挑选一个初始种子点,使用区域生长准则来判断周围像素点是否合并到已生长区域,再把已生长区域中的新像素作为种子点,重复判断该过程,当没有新像素纳入区域时则停止生长,至此形成了一个分割后的区域。种子通常是某个像素,也可以是某个区域。影响区域生长结果的主要因素有初始种子点的选择和区域生长准则。
由于SAR图像中水体目标具有较低的灰度值、较好的均匀性即较小的方差,这和非水体目标具有显著的差异。因而本文以分布统计特征量中的一阶矩和二阶矩作为区域生长的相似性特征,得到初始水体目标。
2 水体目标边缘的精确定位
为了精确定位水体目标边缘,本文采用结合观测图像局部均匀性特征的MRF模型对初始水体目标做进一步处理。
2.1 图像分割的Markov随机场模型
设S={s=(i,j)|1≤i≤H,1≤j≤W,i,j,H,W∈Z+}表示一个二维点集,每一个点表示图像中的一个网格位置,H和W分别表示图像的长度和宽度;X=(Xs)s∈S和x=(xs)s∈S分别表示不可观测的随机场及其实现,xs∈{1,2,…,L}表示位置s所对应的观测图像像素所属类的标记;Y=(Ys)s∈S和y=(ys)s∈S表示观测图像对应的随机场及其实现;N={Ns,s∈S}为邻域系统,Ns,s∈S表示位置s的邻居。图像分割就是要确定观测图像中每个像素类的标记。

>。
(1)
为了计算的可行性,通常假设MRF分割模型的观测场是关于标记场独立的,且标记场中的每一个特征值只和与其对应的标记场的值有关,即
p(Y=y|X=x)=∏s∈Sp(Ys=ys|Xs=xs) =
∏s∈Spxs(ys)
>。
(2)
与此对应的局部最优解可以表示为
(3)
对于MLL模型,由Bayes准则和Hamersley-Clifford 定理可知,图像的分割问题可以表示为如下的最大后验概率或Gibbs场能量最小化问题,即
(4)
令
(5)
(6)
式中,当xs=xt时,δ(xs,xt)=1,否则,δ(xs,xt)=0。上述标记场的MAP等价于最小化如下的能量函数
E=ER+αEY
>
(7)
式中:ER为区域标记因子;EY为数据模型因子;α表示区域标记因子和数据模型因子在分割模型中的相对重要性,α越小,区域标记因子在分割模型中的作用越大,得到的分割图像也越光滑,但可能导致欠分割问题,否则将会保留更多的细节,但可能会导致过分割问题。
2.2 含水体SAR图像的Markov随机场分割模型
由于图像场景的复杂性,在对图像进行分割时往往需要对不同的区域采用不同的分割策略。为此,文献[22]采用了如下可变参数
αs(k)=c·0.9k+1
(8)
式中:k表示迭代次数;c在均质区域取较小的值,在非均质区域取一个较大的值。可变参数可在分割初期取较大的值以正确估计目标特征,后期取较小的值以得到光滑的分割结果。但是模型如何确定均质区域是一个困难的问题。同时,该模型不能满足在非水体部分取较小的α值以得到光滑区域的要求。为此,考虑SAR图像中水体目标及边缘的统计特性,本文给出如下α值
(9)

3 实验结果及分析
实验将本文方法用于2幅真实SAR图像水体的提取并和OTSU[9]方法及图割[23]方法进行对比,以检验本文方法的有效性。图1用于演示本文方法提取水体的过程;图2用于检验存在较强斑点噪声背景的大水体目标的提取效果;图3用于检验对包含细小结构的河流目标的提取效果。实验中,Ns为以s为中心、半径n=2的正方形区域。
图1a为来自ALOS雷达系统的SAR图像,图像像素大小为512×512。本文首先针对SAR图像水体特征用分水岭方法提取水体作为种子区域,通过种子区域的统计特征进行区域生长以对水体进行初始识别与提取。然后利用以上初始水体提取结果确定水体目标均值C1和非水体目标均值C2,最后再利用MRF模型对提取的初始目标边缘进行精确定位。图1a中水库由于镜面反射而呈现黑色,周围山体部分由于散射呈现亮色,也包含了大量的低强度斑块。本文首先利用分水岭方法对图像进行过分割(见图1b),可见由于水体目标在分水岭分割结果中呈现为大面积的集水盆。与之相反,非水体区域由于存在大量密集的局部极小值而呈现为大量的小斑块。将边缘长度大于150的较大区块作为区域生长的种子区域(见图1c),然后利用区域生长得到初始水体目标(见图1d)。图1e为提取的初始水体目标边缘在原图上的位置。可见部分边缘位置还存在较大的误差(见图1e中黄色方框内部分,其放大图为图1f),需要进一步对边缘进行精确定位。图1g和图1h分别为利用所提出的MRF模型对初始水体目标进一步分割得到的水体目标及边缘。图1i显示了MRF模型对图1e中误分割的部分进行了矫正的放大图,可见边缘定位精度有了显著提高。
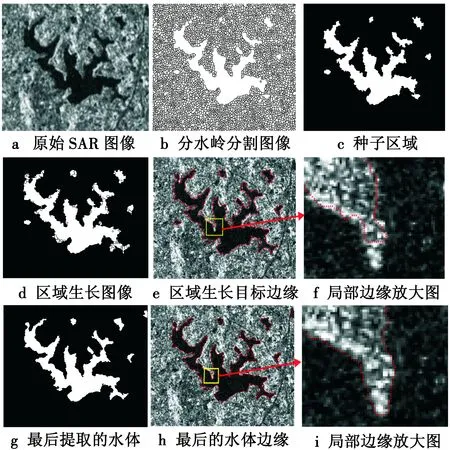
图1 水库SAR图像的提取过程Fig.1 Extraction process of reservoir in SAR image
图2给出了其他3种方法对水库的提取结果。可见单阈值OTSU方法由于阈值偏大而导致严重的虚警(见图2c和图2d)。相对单阈值OTSU方法,双阈值OTSU方法能较好地提取水体目标,但依然在目标左下部出现了部分虚警(如图2e和图2f)。图割方法能正确地提取水体目标,但目标边缘不够光滑。
图3显示了不同方法对包含细小结构SAR图像中水体的提取效果。图3a为包含沙洲及桥梁的SAR图像;图3b和图3c分别为单阈值OTSU方法提取的水体及其在原图中的边缘位置,可见其提取的水体左上角出现了虚警。双阈值OTSU方法能更好地提取河流(见图3d和图3e),但在图的左边中部的河流支流出现了漏检。图割方法能正确提取水体目标(见图3f和图3g),但仍然存在着所提取的水体目标边缘不够光滑的问题。本文方法所提取的河流相对其他方法具有更高的精度和光滑度(见图3h和图3i)。
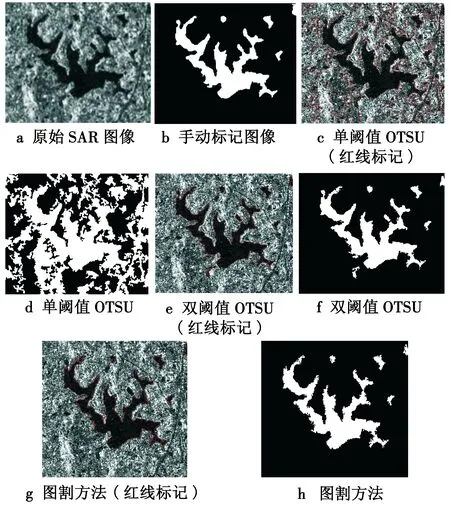
图2 水库SAR图像的提取结果对比Fig.2 Comparison of the extraction results ofreservoir in SAR image

图3 河流SAR图像的提取结果对比Fig.3 Comparison of the extraction results of streams in SAR image
表1给出了4种方法对2幅SAR图像中的水体进行分割的量化评价。表1中数据为4种方法和手动标记图像进行对比所得到的正确分割点数和图像大小的比值。从表1可看出,本文方法在两种情况下所提取的水体目标都具有更高的精度。

表1 不同方法提取水体目标的精度
4 结束语
本文针对SAR图像水体提取时目标的筛选和边缘模糊问题,给出了一种结合区域生长和MRF模型的水体目标提取方法。结果显示,在进行区域生长时,通过提取分水岭过分割图像中的较大区块作为水体的种子区域能较好地剔除非水体区域,没有出现虚警或漏检的情况,所提出的包含观测图像灰度均值和局部均匀性特征的MRF模型能较好地对初始水体目标边缘进行精确的定位。
猜你喜欢
建材发展导向(2022年2期)2022-03-08 01:43:38
建材发展导向(2021年14期)2021-08-23 00:57:44
兽医导刊(2019年1期)2019-02-21 01:13:44
中国环境监察(2017年3期)2017-05-14 06:19:02
通信产业报(2016年44期)2017-03-13 08:41:45
城市道桥与防洪(2014年1期)2014-02-27 07:24:36
河南水利与南水北调(2013年4期)2013-08-15 00:47:53
河北环境工程学院学报(2012年1期)2012-03-20 13:57:59
河北医科大学学报(2011年6期)2011-03-25 10:16:38
雕塑(1999年2期)1999-06-28 05:01:42