电磁驱动仿生机械手臂
2018-11-20 01:29李国良吕佳刘晓成
中国科技教育 2018年3期
李国良 吕佳 刘晓成

简介
人们一直以来都在研究如何制造某种与人类自身结构及功能相似的机械装置,从Unimate到dobot,机械臂技术已然成为当今科技发展的一个重要方向,其应用领域也逐步拓宽,对其性能的要求也在逐步提高,包括轻质、重载、高速、高精度、高灵活性、高适应性、智能化等。机械臂可以在很多人类无法进入的区域,比如辐射、化学污染、水下、失重、高温、高压、噪声等环境中工作。在工业4.0时代,机械臂在工业制造、医学治疗、娱乐服务、军事、半导体制造及太空探索等领域具有极大的应用与发展空间。作为现代机械制造生产系统中的一个重要组成部分,机械臂在流水线上能以较高的精度帮助人们进行重物搬运、焊接装配等。
原理验证机
第一代原理验证机采用一般机械臂底座放于桌面上的结构设计,通过给电磁铁输入高频脉冲信号,利用电磁铁中自感现象导致电流具有惯性的特点,控制电磁铁通断时间以实现电磁铁的定位。但根据实际验证机验证,证明其原理不具有可行性,后根据磁悬浮列车驱动原理,计划设计直线电机结构控制,但经过论证否定了该方案。因而设计了第二代原理验证机如图1所示,采取类似人类手臂的垂直结构,运用双头电磁铁组进行牵拉,运用单圈电位器进行定位,并利用吸盘式电磁铁与导轨间的摩擦力进行固定,圆台及手指部分采用舵机驱动。
各机构设计
大臂结构
大臂为一个形状似藕的垂直结构,主体为圆柱体,内部有垂直的圆柱形管道,将推拉式电磁铁逐个串联安装以增加行程。除最下方电磁铁为推式电磁铁外,其余为拉式电磁铁,分为正反2组放入大臂的管道中,分别模拟肱二头肌和肱三头肌。将这些电磁铁组并联并拉动上部牵引线(使用自行车刹车线),将导轨安装于肘部轴承上,滑块通过碳杆拉杆与轴承相连,牵引线另一头(外皮)固定于直线导轨的滑块上,内芯则固定于导轨的远端。当牵引线回抽时,滑块接近远端,以此抬起小臂,模拟肱三头肌电磁铁拉动的牵引线则固定于导轨下部,反向牵拉,以此放下手臂。
肘部阻尼结构
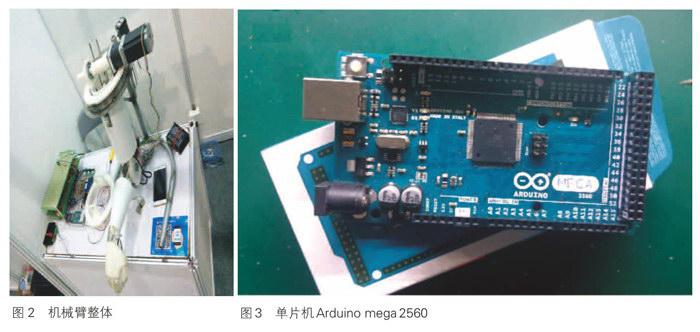
为控制小臂的运动幅度及运动速度,肘部安装了阻尼装置,即采用自行车刹车盘,当小臂到达预定位置后锁死阻尼盘(如图2所示),最下面一个推式电磁铁弹出以消除前面电磁铁牵拉的冲量,防止电磁铁因冲量过大拉动小臂超过预定位置导致精度降低。随着阻尼增大,机械振动将会增大,因此只凭借该阻尼盘无法实现较精准的定位,故将刹车器安装于大臂后侧,上端升降步进电机运动时,可使刹车器角度小幅变化,带动小臂小范围变化,以此进行再次定位以提高定位精度。
小臂及机械手结构设计
在小臂中部安有轴承及28BYJ48步进电机以实现小臂的转动,手腕部使用一个RDS3115MG舵机控制手抬高放下的动作。为了让手指既能很轻巧地抓鸡蛋,又能快速地敲击键盘或琴键,因此安于小臂前段用于控制手指的动力方式不采用舵机驱动,而改用升降步进电机与电磁铁相结合的动力布局方案,运用自行车的变速线作为拉绳拉动手指活动,并根据实际应用情况决定采用步进电机驱动或电磁铁驱动的方式,运用电磁铁驱动可利用其冲量实现弹琴等敲击动作,或配合步进电机,运用电磁铁的末端冲量实现捏碎鸡蛋等动作。
支架部分设计
支撑架分为底座、支柱和圆台,圆台安装了推力轴承及Y轴垂直平面内旋转轴承,可使用步进电机进行水平转动,并安装了步进电机控制Y轴运动,以此进行伸出或收回的动作。完成后的机械臂见图2。
电路设计
控制系统的单片机采用Arduinomega2560,见图3。采用场效应管作为电磁铁的控制元件,并配合10mF50V电容和肖特基管作為供电部分,使用激光测距仪、陀螺仪、单圈电位器及直线电位器对小臂角度进行判断和定位,通过倾斜传感器进行初始位置校准。
算法设计
该机械臂系统需要事先输入预定目标位置后再进行动作到达指定位置,不适于进行微小多次的调整,因此需对该机械臂进行运动学逆分析。
经推导可得到支架上Y轴步进电机输出值为:
Y=1'sinθ1(1'为中心支点到步进电机作用点距离)
以此实现有目标位置的运动角度及步进电机运动距离判断。
结论与改进方向
该机械臂模型在医用义肢、辅助搬运器械、教育机械、装配、计算机智能模拟交互等领域及危险环境替人工作方面有较大的应用前景。相较于传统机械臂具有运动速度快、结构简单、造价较低、易于更换配件、可在高粉尘等复杂环境中有效工作的特点。它更适于进行有目标的指定位置操作,不适用于小幅度的精细工作。
该机械臂还有改进空间。在改进设计时,可定制更为小巧的电磁铁以提高效率,也可运用拓扑绝缘体、液体金属等材料实现高效低能耗运动;因该系统与传统机械臂有较大结构及动力区别,因此在算法方面也有很大的改进空间。
该项目获得第32届全国青少年科技创新大赛创新成果竞赛项目中学组工程学一等奖。
专家评语
本项目综合运用了机械、电气、生物学科的知识,作者在完成项目过程中各方面的能力得到提高,知识得到丰富。以电磁铁模拟肌肉爆发力特性有创新。但作者对电磁铁的特性理解还不够,手臂的精度考虑不足。应进一步研究多轴联动,开发自动化程度更高、精度更高、速度更快的机械臂。
猜你喜欢
小天使·三年级语数英综合(2020年9期)2020-12-23
家庭百事通·健康一点通(2020年11期)2020-11-30
少林与太极(2019年5期)2019-12-12
振动工程学报(2019年2期)2019-05-13
少年博览·初中版(2018年7期)2018-10-29
中学生数理化·中考版(2017年1期)2017-03-29
现代商贸工业(2016年4期)2016-10-14
诗潮(2016年9期)2016-05-14
建筑工程技术与设计(2015年29期)2015-10-21
湖北教育·教育教学(2014年2期)2015-01-17