一种基于颜色纹理与SVM的盲道分割算法
2018-11-19 10:58方天宇
软件导刊 2018年11期
陈 都,王 雷,方天宇
(南京理工大学 电子工程与光电技术学院,南京 210094)
0 引言
为解决盲人出行安全问题,我国在大部分城镇均铺设了盲道,但由于非法占用及盲道本身设计不合理等诸多因素,导致电子导盲设备识别率低、大部分盲道没有实现对应功能。本文利用现有盲道特征和盲道导航系统,提出了一种基于颜色纹理和SVM的盲道分割算法。目前,盲道分割算法主要分为基于颜色、基于纹理两类。以阈值分割和区域生长等为代表的基于颜色的分割方法[1]效率高,能相对较好地实现盲道分割,但该方法对颜色及光照强度十分敏感,很多时候由于盲道与背景区域颜色相近而无法正确分割;基于纹理的分割方法[2]通过提取纹理特征再对其进行聚类,基本不受颜色和光照影响,能够相对较好地实现盲道分割,但由于针对不同类型盲道得到不同效果图,所以普遍性不足,且由于采用聚类方法对纹理特征进行分类,在一定程度上增加了处理时间。此外,现有盲道分割算法针对的盲道背景相对单一,虽然极大降低了盲道检测难度,但与实际盲道背景相差较大,使算法无法很好地应用于实际盲道分割。
近年来众多学者对盲道分割算法进行了深入研究。如文献[3]利用基于颜色聚类的分割算法,在盲道与周围环境颜色区别不大、或受光照和阴影等干扰时,其盲道分割效果很差;文献[4]、[5]利用的是基于纹理的分割算法,虽然基本不受光照和阴影影响,但是对不同类型的盲道很难得到理想的分割效果,普适性差。因此本文设计了一种基于颜色纹理和SVM的盲道分割算法(CT-SVM),其具有良好的普适性和抗噪性,盲道分割效果较好。
首先通过对多组盲道小块和非盲道小块样本进行分析,提取其中纹理特征,并通过分析其在颜色空间中样本特征差异,再选取样本在HSV色彩空间下的特征进行分类训练。最终利用SVN训练模型对输入图像进行特征判断,将盲道从输入图像中提取出来。实验结果证明,本算法可以准确提取出盲道,具有良好的普适性和抗噪性。
1 支持向量机(SVM)
支持向量机(Support Vector Machine,SVM)是由Vapnik等[6]基于结构风险最小化原理提出的一种有监督的统计学习方法。该方法通过寻求结构化最小风险,提高学习机泛化能力,实现经验风险和置信范围最小化,从而达到在样本量较少的情况下,亦能获得良好的统计规律,其分类原理分为线性可分与线性不可分两种情况。
1.1 线性可分
假设有n个线性可分的训练样本(x1,y1),(x2,y2),…,(xn,yn),yi∈{1,+1},均存在权向量ω和偏置b,如图1所示,其满足:
yi(ωT·xi+b)≥1,i=1,2,…,n
(1)
针对组别相同的训练样本,能够使用不同的超平面(Hyperplane)进行划分。利用SVM进行分类,找到最佳权重值ω0以及最佳偏置值b0,ω0和b0能对两类数据进行最佳分割,且对测试样本具备最优泛化能力[7]。
1.2 非线性可分
实际生活与自然界中很多问题并不是线性的,如图1(a)所示,故需要通过一种非线性变换(x→z=▯(x))把输入空间X内的输入向量x映射到另一个高维的特征空间F中,令其变成线性可分样本[8],如图2(b)所示。
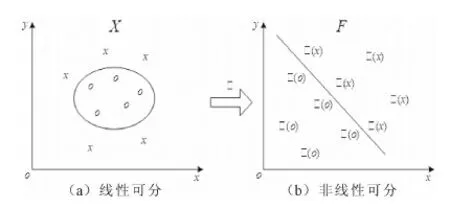
图1 SVM非线性分类原理图
在F空间内,z=▯(x)属于线性可分的情况,故式(1)能够应用于此处,仅需要把x替换为z,即:
(2)
其中,K表示一个非负定对称函数,即核函数(Kernelfunction)[9]。K通常能够取不同的函数形式,如多项式函数、高斯函数、径向基函数等。经过非线性变换后,二次规划[10]则变成对L(α)求解极值,
(3)
与此同时,分类决策函数变换为:
(4)
其中,
(5)
1.3 支持向量机算法
在使用SVM算法时参照如下步骤:
(1)初始化αi,λ。
(2)Fork= 1,…,itemax执行步骤(3)到步骤(7)。
(3)Fori= 1,…,n执行步骤(4)到步骤(5)。
(4)假设一个变量qi:
(6)
(6)对γ,λ进行计算。
(7)
(8)
(7)若满足k=itemax亦或是γ=γmax,则循环停止,否则跳转到步骤(2),开始执行下个k值。
(8)执行后续计算。
根据以上SVM原理和分类算法[11],构建一个通用二类分类器,并应用于在复杂环境中的盲道分割。
2 颜色与纹理特征选取
2.1 样本选取
若使用SVM分类器对盲道进行分割,则需采集盲道区域的正样本和非盲道区域的负样本。实验拍摄了100幅现实生活中盲人在盲道上行走的场景图像,包含了不同类型盲道。如图2(a)所示,由于图像上方的盲道特征极不明显,且干扰项众多,故综合考虑后,对拍摄图像进行预处理,即将其上方30%舍去,如图2(b)所示。随后将50幅图像作为训练样本,另外50幅图像作为测试样本。从50幅训练图像中随机截取大小20*20的盲道小块以及非盲道小块各100张作为SVM分类器的正负样本,其中部分样本如图4、图5所示。在截取正样本时,尽量保证每种类型的盲道小块数量均匀;在截取负样本时,使非盲道小块的种类尽可能多样化。
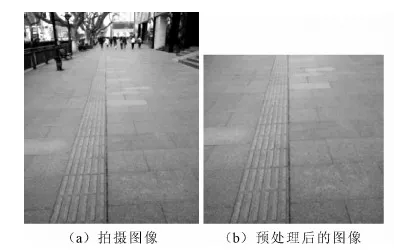
图2 图像示例
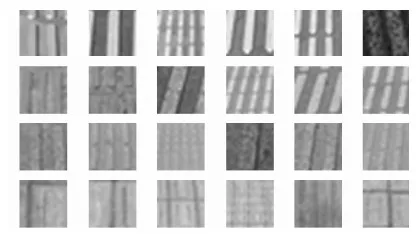
图3 部分盲道小块(正样本)
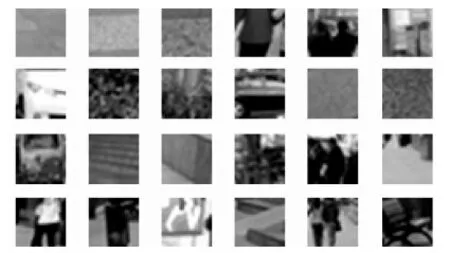
图4 部分非盲道小块(负样本)
2.2 颜色特征选取
在图像处理中,经常使用的颜色空间有RGB空间、Lab空间以及HSV空间。
分别计算盲道小块和非盲道小块颜色空间的平均值,对比发现,在各个颜色空间中盲道小块和非盲道小块样本差异较大的是HSV颜色空间[12],故颜色特征选取HSV颜色空间。HSV颜色空间由色调(Hue)、饱和度(Saturation)、亮度(Value)3个通道构成。色调H代表不同类型的颜色;饱和度S代表颜色深浅;亮度V代表颜色明暗,如图5所示。
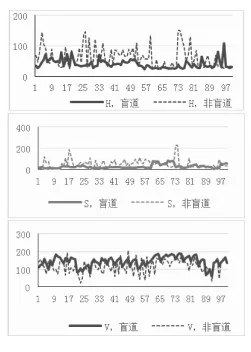
图5 HSV颜色空间对比
图6 Gabor滤波器三维结构
2.3 纹理特征选取
现阶段纹理特征提取主要分为以下4种[4]:基于统计的方法、基于信号处理的方法、基于结构的方法以及基于模型的方法。本文采用的Gabor变换[13-15]属于基于信号处理的方法。
通常情况下,实Gabor滤波器[16-17]有两种类型:正弦型Gabor滤波器以及余弦型Gabor滤波器,分别由正弦函数及余弦函数通过调制二维高斯函数获得,其中正弦Gabor滤波器在空域中是奇对称函数,而余弦Gabor滤波器则为偶对称函数。正弦Gabor滤波器与余弦Gabor滤波器的三维示意结构[18]如图6所示,由图6可知,Gabor滤波器与简单细胞的响应相似,此外Gabor滤波器的空间域及频率域局部化性质相对较好。
Gabor滤波器组的参数难以确定。Tan[19]利用谱峰检测技术对Gabor滤波器组中心频率进行自动确定。Li[20]利用免疫遗传算法确定Gabor滤波器参数。Jain等[5]提出Gabor滤波器组中心频率依次是:√2,2√2,4√2,…,(Nc/4)√2周期/图像宽度,其中Nc表示图像数组列宽。本文从生物视觉的角度确定Gabor滤波器参数,更加贴近人的视觉感知系统。通过参考以上Gabor滤波器参数设计方法,选取Gabor滤波器组波长为:2.82、5.65、11.31、22.62及45.25,方向角为0°、45°、90°、135°。在Gabor滤波之后进行非线性处理,即将图像经过正弦Gabor及余弦Gabor滤波之后的结果均取平方,然后进行相加,再对其进行开方运算得到Gabor能量。
分别计算盲道小块与非盲道小块样本的Gabor能量平均值,并对其进行对比。发现在Gabor滤波器组中,盲道小块与非盲道小块样本差异较大的是波长为2.82,方向角为0°、45°的Gabor滤波器、波长为5.65,方向角为0°、45°的Gabor滤波器以及波长为11.31,方向角为0°、45°的Gabor滤波器。故纹理特征选取波长分别为2.82、5.65、11.31,方向角分别为0°、45°,即总共3个频率和2个方向角的Gabor滤波器组,如图7所示。
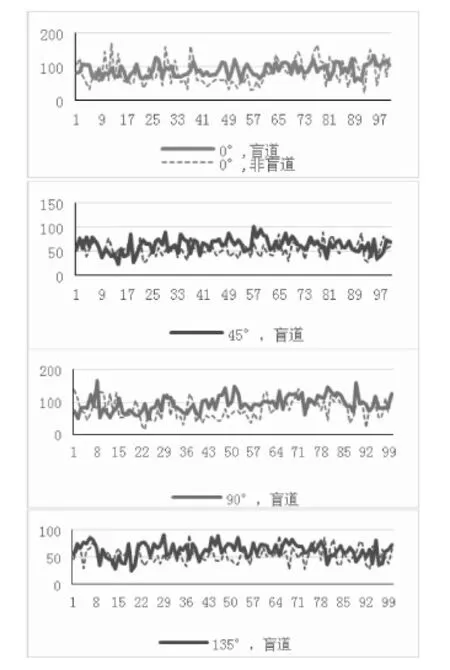
图7 波长为2.82的Gabor能量对比
3 实验步骤与实验结果
3.1 实验步骤
利用SVM分类器训练样本。首先,分别计算盲道小块与非盲道小块样本特征向量x、y,其特征向量为第二节中选取的颜色特征和纹理特征的组合,分别是HSV颜色空间的3个特征与波长,分别为2.82、5.65、11.31,方向角分别为0°、45°的Gabor滤波器组的6个特征;然后,将盲道小块样本的特征向量x组成正样本训练集X= [x1,x2,…,xN]T,将非盲道小块样本的特征向量y组成负样本训练集Y= [y1,y2,…,yN]T,其中N表示样本数;最后,将正样本集X与负样本集Y输入SVM分类器中进行训练,得到SVM训练模型,其中SVM分类器采用的核函数为多项式函数。
计算测试图像的特征向量,即HSV颜色空间的3个特征与波长分别为2.82、5.65、11.31,方向角分别为0°、45°的Gabor滤波器组的6个特征,共9个特征;再将测试图像每一个像素点的特征向量导入SVM训练模型,对该像素进行分类;最后对分类后的图像进行二值化,输出分割后的盲道图像。
CT-SVM算法步骤如下:
Step1:采集100张盲道正样本与非盲道负样本。
Step2:计算盲道正样本训练集X与非盲道负样本训练集Y,将其输入SVM分类器中训练,得到SVM训练模型。
Step3:计算测试图像的特征向量,将每个像素点的特征向量输入SVM训练模型中进行分类。
Step4:将分类后的图像进行二值化,即得到分割后的盲道图像。
3.2 实验结果
对实际拍摄的盲道图像进行测试,将文献[3]、[4]和[5]的测试结果图进行对比,其中文献[3]利用基于颜色的分割算法,文献[4]、[5]利用基于纹理的分割算法。本实验的硬件环境是:Inter Core i3-2310M CPU 2.10GHz,4G内存,软件环境是Windows 7 + VS2012。实验结果如图8所示。
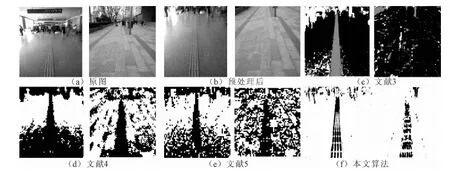
图8 各算法的盲道分割结果
表1列出了各种方法对测试图像进行计算得到与之对应的盲道分割图消耗的平均运算时间,其中CT-SVM消耗时间相对较少,能够满足导盲系统实时性需求。

表1 各算法盲道分割平均时间
4 结语
本文提出了一种基于颜色纹理和SVM的盲道分割算法(CT-SVM)。通过对SVM理论的研究,在此基础上,选取了盲道小块和非盲道小块的HSV色彩空间颜色特征,将Gabor纹理特征与SVM结合,对样本进行训练,随后利用SVM训练模型对输入图像进行特征判断,最终将盲道从目标区域中分割出来。从实验结果和分析可以看出CT-SVM克服了现有盲道分割算法仅依赖于某一特性的不足,能较准确、快速地将盲道分割出来,具有良好的普适性和抗噪性,可应用在电子导盲设备上,提高盲道利用率。
猜你喜欢
青少年日记·小学生版(2019年2期)2019-09-02
妇女生活(2019年3期)2019-03-18
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
小主人报(2016年2期)2016-02-28
小学生作文·小学低年级适用(2014年7期)2014-09-10
作文大王·中高年级(2007年7期)2007-10-09