基于农作物的装运系统设计与制作
2018-11-15 13:15林盛昌王世光王嘉辉
现代制造技术与装备 2018年10期
林盛昌 王世光 李 奎 王嘉辉
(南通理工学院 电气与能源工程学院,南通 226002)
目前,农作物的买卖大多还依靠人力来完成,农民的粮食想要卖出去,需要多个中间商才能出售到各个加工厂。在这个过程中,中间商会从中拿取一部分利润,甚至有些黑心商人还会在秤上作假,多拿农民的谷物谋取利益。
为了使农民和各大加工厂利益最大化,可使厂家直接与农民对接进行买卖,避免中间商赚差价。本产品可对整个买卖过程进行全程无死角的监控与管理。农民只需将农作物运送到指定位置,按下启动按钮,整个系统就会精准有序地运行,同时农民可拿起手机加入特定的局域网,对整个过程进行查看。
1 硬件设计
1.1 农作物装运系统
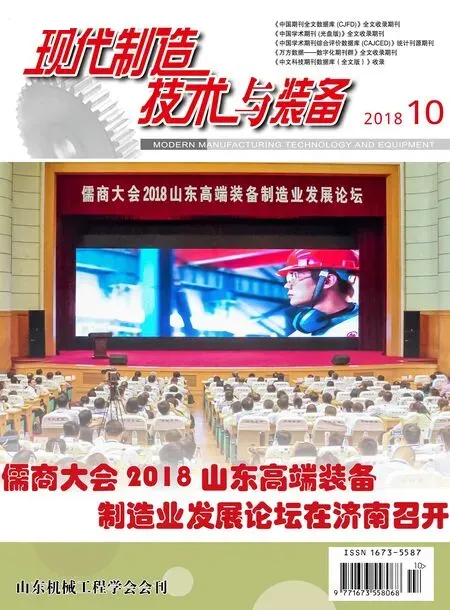
本系统部件由南通理工学院自主设计,利用数控加工完成。其工作原理为:控制系统控制电机进行运转,进而驱动双气缸进行作业,使相应的机械部件按预定顺序进行动作,完成所要求的调制工作。该装运系统对所需农作物进行准确计量,避免了人工失误,减少了人力消耗,有效提高了服务效率,调配系统结构如图1所示。
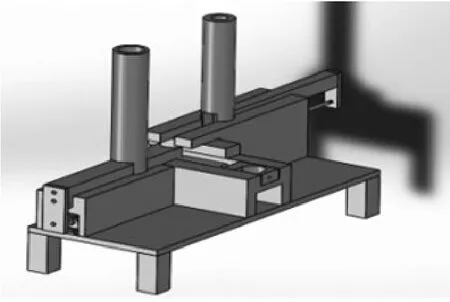
图1 农作物调配系统结构
1.2 搬运机器人和运输机器人
搬运机器人的任务是将装袋后的农作物送给运输机器人。它的机构原动力由气泵提供,通过可编程控制器控制双作用气缸,从而实现相应机械部件按预定顺序进行动作,实物如图2所示。运输机器人接过搬运机器人手中的粮袋,进行封口,最后将其运送到货车上,实物如图3所示。
1.3 微网控制系统
微网控制系统主要用来远程监控管理,这样厂家和农民可以随时随地地对农作物装到袋中;搬运传送带上进行封口;封口后的粮袋装车,这个过程进行实时监控。如果出现突发情况可第一时间进行处理。农民还可以通过摄像头向厂家反馈情况及意见,从而提高自身的满意度。农作物装运系统流程如图4所示。
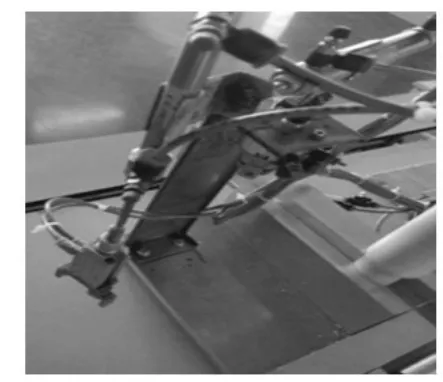
图2 搬运机器人
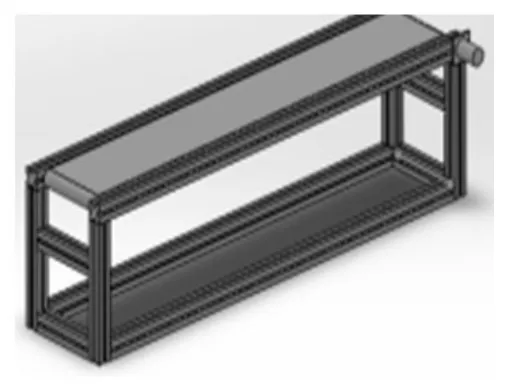
图3 运输机器人
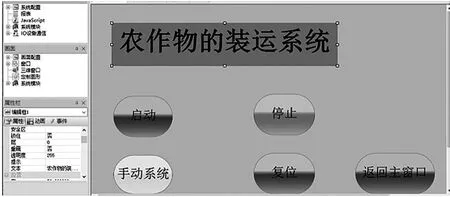
图4 农作物装运系统
2 原理图
2.1 电气控制原理图
当操作人员按下启动按钮时,PLC会收到一个输入信号,这时农作物装运系统开始工作:Y0首先输出推动粮袋到达指定位置;1s后Y1输出将设定好重量的农作物装入袋中,然后Y2输出把农作物送到指定位置;2s后Y3、Y4、Y5、Y6间隔1s顺序接通,机械手夹取粮食以后Y5、Y4、Y3、Y6间隔1s顺序失电,搬运机器人把粮食交给运输机器人;1s后Y7输出把粮食送到封口机旁,Y10输出封口把粮食运输到货车上;最后整个系统复位重复以上操作,直到按下停止按钮时,系统停止工作。电气控制原理如图5所示。本机器人采用气动控制原理如图6所示。
2.2 监控控制
整个系统电源接通以后,摄像头、路由器也同时启动,管理者可加入特定的局域网,观看整个系统的运营情况,实施管理。
3 结语
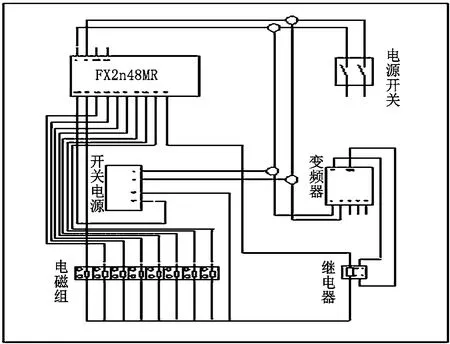
图5 电气控制原理
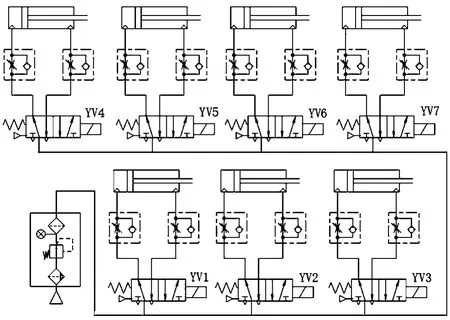
图6 气动原理
农作物的装运系统设计与制作已经完成,并且投入生产,有效避免了黑心商家欺瞒农民,从交易过程中牟利。从机械、电气线路的设计到机械加工、工件焊接以及程序的调试,经历了很多困难,笔者重新学习了机械方面的知识,巩固了基础,为以后的设计工作打下坚实的基础。
猜你喜欢
环球时报(2023-01-29)2023-01-29
科学大众(2020年12期)2020-08-13
通信电源技术(2018年5期)2018-08-23
电子制作(2018年2期)2018-04-18
科技创新与应用(2017年17期)2017-06-16
电子制作(2017年19期)2017-02-02
山东工业技术(2016年15期)2016-12-01
BOSS食尚(2016年6期)2016-06-01
中国外汇(2015年3期)2015-01-01
对外经贸实务(2014年12期)2014-12-04