高速动车组主动降噪技术的探索与应用*
2018-11-15 10:06:38董孝卿蒋成成田朋溢
铁道机车车辆 2018年5期
高 攀, 董孝卿, 陈 彪, 蒋成成, 田朋溢
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
随着我国经济的快速发展,高铁出行成为人们出行的重要交通方式,乘客的乘坐舒适度成为重要关注点。其中,行驶时的噪声水平是衡量乘坐舒适度的一个重要指标。因此,高铁噪声的控制成为高速铁路动车组技术研究的热点。
一般来说,噪声控制可以从噪声源、噪声传播路径和噪声接收者三方面入手[1]。传统噪声控制主要以噪声的声学控制方法为主,主要技术手段包括吸声处理、隔声处理、使用消声器、振动的隔离与降低等。这些噪声控制方法的机理在于使噪声声波与声学材料或结构相互作用而消耗声能,从而达到降低噪声的目的,属于无源或被动式的控制方法。无源控制方法对降低中高频噪声比较有效,而对于降低低频噪声的作用不大。为此,一项新的噪声控制技术--主动噪声控制的提出与发展适应了实际的需求,目前已发展成为一种重要的噪声控制手段[2-4],并在很多行业中得到了广泛的应用。我国主动降噪技术研究起始于上世纪九十年代,主要集中在国内高校研究所等科研机构和军工领域。国内科研机构以西北工业大学,南京大学,中科院声学所为主力,做了大量研究工作;军工应用主要集中在船舶舰艇,航空航天领域主动隔振和主动降噪。总体来说,我国主动降噪技术尚处于研究探索阶段,在市场上几乎看不到成熟的产品被大规模应用推广。ISVR(英国南安普顿大学振动噪声研究所)是国际领先的振动与噪声研究单位,承担过多个噪声主动控制项目,包括汽车车内发动机噪声及路噪主动控制方法研究,飞机机舱噪声主动控制方法研究以及豪华游艇主动噪声控制系统等,取得良好的效果。另外Bose公司对ANC主动降噪技术的研究取得了良好的效果,不仅在耳机方面,Bose在通过一系列的研究后,还成功的将ANC主动降噪技术运用在了汽车上,但国外对技术封锁非常严重。
有源噪声控制系统中,为了在人耳附近获得安静区域,误差传感器的放置位置通常应尽可能靠近人耳,但给使用人带来不适感。为此,Elliott和Garcia等在噪声主动控制中引入了虚拟传声器技术[5-7]。
1 主动噪声控制基本原理
1.1 软件实现
主动噪声控制系统一般需要采集被控初级声场的声音信息,通常称为参考信号x(n)。参考信号x(n)送到前馈控制器,经过控制器处理后,产生一个相应的控制信号y(n),驱动喇叭输出该声音信号,通过次级通路S(z),产生次级声场y'(n),和实际通过物理途径P(z)传到误差传感器的信号d(n)相叠加,误差传感器获取初级声场和次级声场叠加形成的合成信号e(n),并送到控制器中,控制器根据算法实时计算出次级声源信号y(n)。其控制目标为使误差传感器检测到的误差信号e(n)的均方误差最小,实现最优控制。
综合考虑系统的运算速度和计算精度等因素,系统选取Filtered-X LMS算法[1],相比较于基本的LMS算法,在更新滤波器系数W(z)的过程中增加滤波器S(z),算法原理如图1所示。

图1 控制算法原理框图
主动噪声控制的目标是使误差传感器采集的信号(一般为A计权声压级)达到最小,即在误差传感器处形成一个安静区域。因此误差传感器与人耳距离越近,效果越好,但会造成使用的不便利性。因此虚拟传感器的引入可有效解决这一问题。虚拟传感器能够跟踪人体头部运动,始终保证形成的安静区域在人耳处而不是在误差传感器处。基本理论是以原来的误差传感器位置为虚拟传感器位置,物理传感器移到距离人耳较远位置,控制算法在虚拟传感器附近形成安静区域,虚拟传感器与人耳所处位置并不矛盾。
基于Filtered-X LMS算法引入虚拟传感器的有源噪声控制原理[8]如图2所示。

图2 基于FX LMS算法引入 虚拟传感器控制原理图
Hp(z):控制喇叭到物理传感器之间的传递函数;
Hv(z):控制喇叭到虚拟传感器之间的传递函数;
Hpv(z):物理传感器到虚拟传感器之间的传递函数。
1.2 硬件实现
主动降噪系统的硬件需满足数据处理速度要求快、信号测量精度高,同时工程应用方便等要求,系统进行数据处理的时间越短,控制的实时性越强,更好的满足物理现象的因果关系。特别是对时变信号、收敛速度、控制实时性非常关键。系统通道数较多时,数据量大、算法复杂、收敛速度较慢,对系统的数据处理能力要求较高。
基于上述综合考虑,硬件系统采用NI Compact RIO嵌入式测控平台,Compact RIO提供了一个开放的嵌入式架构,包括内置的嵌入式控制器、实时操作系统、可编程FPGA以及小型、坚固且可热插拔的工业I/O模块。快速实现测量与控制系统的自定义设计、原型发布和工程部署。
Compact RIO的RIO(FPGA)核心内置数据传输机制,负责把数据传到嵌入式处理器以进行实时分析、数据处理、数据记录或与联网主机通信。利用LabVIEW FPGA基本的I/O功能,用户可以直接访问Compact RIO硬件的每个I/O模块的输入输出电路,如图3所示。所有I/O模块都包含内置的接口、信号调理、转换电路(如ADC或DAC),以及可选配的隔离屏蔽。这种设计使得构架具有开放性,用户可以访问到底层的硬件资源。搭建完毕的原理样机如图4所示。

图3 NI CompactRIO数据流

图4 原理样机图
2 原理样机控制效果验证
为检测原理样机的降噪效果及其稳定性,分别在试验室内采用标准信号以及高速动车组车内噪声信号模拟进行试验。首先利用3种单频信号(100,200,400 Hz)组合形成的理想信号对原理样机的降噪效果进行验证试验,降噪系统控制前后左右耳处A计权声压级可降低约17 dB。降噪曲线及峰值频率处频谱降噪效果如图5~图6所示。
利用高速动车组实测噪声信号,通过在试验室内进行回放模拟,主动降噪系统样机控制前后在左右耳处A计权声压级降低约10 dB,控制效果如图7所示。

图5 理想信号降噪效果图

图6 试验室内降噪效果对比图(理想信号)

图7 试验室内降噪效果对比图
为验证主动降噪系统在动车组实际运行过程中的降噪效果,在(大同-西安)大西客运专线,选取中国标准动车组以350 km/h运行时商务车为控制目标进行验证试验,测点现场图如图8。试验结果表明基于虚拟传感器技术的主动降噪系统在控制前后人耳附近声压级平均降低约2.5 dB,降噪曲线如图9所示。
由于实际运行时动车组客室内声场较为复杂,确定主要噪声源成为重要方面,因此在接下来的研究中建议首先对降噪区域的声场分布及噪声传递路径进行分析,明确噪声源的传播过程,优化控制算法,从而达到更好的降噪效果。

图8 商务区座椅 主动降噪现场图
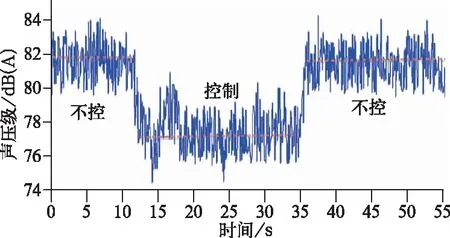
图9 高速动车组商务车车内 噪声主动降噪效果对比图
3 结论与展望
基于虚拟传感器技术的主动降噪系统在试验室内具有良好的降噪效果,使用多种单频信号和动车组录制的噪声信号可分别降低约17 dB和10 dB,系统稳定,人耳感觉明显。此时噪声源为点声源,且声场环境稳定,参考信号与该噪声源信号的相关性好,可以有效提取误差点信号的来源。
在现场实际测量中,由于高速动车组车内声场环境变得复杂、不稳定,参考信号与控制点信号相关性变差,控制前后降噪效果仅约2.5 dB。在以后的研究中,为提高动车组实际运行状态的主动降噪效果,需对客室内噪声传播途径、声场分布等特性做进一步的分析,优化主动降噪算法,从而进一步提高主动降噪效果。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:25:50
环境保护与循环经济(2021年7期)2021-11-02 08:10:56
铁道通信信号(2020年12期)2020-03-29 06:21:56
海峡姐妹(2020年2期)2020-03-03 13:36:34
家庭影院技术(2018年11期)2019-01-21 02:20:54
铁道通信信号(2018年11期)2019-01-19 01:14:54
制造技术与机床(2017年12期)2017-02-02 07:05:03
铁道通信信号(2016年11期)2016-06-01 12:11:26
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:33
噪声与振动控制(2015年4期)2015-01-01 07:08:14