
谱-空图嵌入的高光谱图像多核分类算法
2018-11-14 10:27:44郭志民孙玉宝耿俊成
小型微型计算机系统 2018年11期
郭志民,孙玉宝,耿俊成,周 强
1(国网河南省电力公司 电力科学研究院,郑州 450052 2(南京信息工程大学 信息与控制学院,江苏省大气环境与装备技术协同创新中心,南京 210044)
1 引 言
近年来,遥感成像技术发展迅速,高光谱图像的空间与光谱分辨率越来越高.与传统的多光谱图像不同,高光谱图像中每个像素通常由几十至几百个光谱波段组成,形成连续的光谱曲线,包含更加丰富的光谱信息,能够更加准确地判别每个像素所反映的地物类别,因此在电力监测、电力规划、土地测绘、农业等领域的应用也越来越广泛.然而,高的光谱分辨率在带来优点的同时,也引入了一些新的挑战.第一个挑战是维数灾难问题.高光谱图像的标注代价昂贵,而每个像素通常位于几百维的高维空间中,很容易导致“维数灾难”现象[1].第二个挑战是信息冗余问题.高光谱传感器是在电磁波谱上进行的稠密采样,使得高维光谱特征具有很大的相关性.这种冗余的信息不仅会带来计算和存储的损耗,还会降低分类性能[2].
降维是解决以上问题的常用方法之一[3-5].在高光谱图像处理中,波段选择和特征变换是两种最常用的降维方法.波段选择[6,7]的目的是从给定波段中筛选出一个子集,以捕获尽可能多的有效信息.而特征变换尝试将原始的光谱波段按照一定的准则投影到一个维度更低的子空间中,如主成分分析[8]和线性判别分析[9,10]等方法.主成分分析旨在最大化投影之后的数据方差,而线性判别分析则期望最大化类间散度矩阵并最小化类内散度矩阵.不同于这两种方法,局部流形保持投影[11]旨在保持相邻数据间的几何结构.在文献[12]中,保局投影被成功地应用于高光谱图像分类中.
近年来,图模型在遥感图像分析中得到了非常广泛的关注[13,14].构造图的关键在于确定邻接关系和计算图中任意两点间的权重.其中,k近邻法和ε球面邻域法是常用来建立邻接关系的两种方法[15,16],而“高斯核”函数则是广泛采用的计算顶点间权重的方法.为了更好地构建图模型,一些改进的方法逐渐涌现出来.例如,在文献[17]中,Wang和Zhang将非负局部线性重构系数作为边的权重,充分利用了每个邻域的几何结构信息.类似地,Liu等人提出了基于弹性网稀疏表示的图权重计算方法[18],该方法能够很好地编码数据的判别信息,并同时确定图模型的邻接关系和边权重.
对于高光谱图像分类而言,尽管图模型能够取得一定的效果,但已有的模型大多只考虑了光谱特征,而忽视了空间上下文信息.随着成像光谱仪技术的不断更新,现有的传感器获得的高光谱影像往往还具有非常高的空间分辨率.因此,局部区域的像素点通常隶属同一目标物体.对于一个较大的均匀区域,内部的像素点可能具有不同的光谱响应.如果仅使用光谱特征,这些像素点可能会被划分到不同的子区域中,显然会带来一定的问题.相反,对于多个相邻的区域,如果仅使用空间信息,则这些区域很可能被划分到同一个区域中.综上所述,融合光谱和空间信息有利于获得更为精确的结果.
现有的组合光谱和空间上下文信息的方法大致包含三种不同类型:特征级融合、决策级融合以及基于正则化的融合[2].特征级融合技术首先分别提取光谱特征和空间特征,然后将这些特征串联成向量或构建核函数[19,20]后再送入分类器.决策级融合技术首先利用光谱和空间信息得到多个预测结果,然后利用投票方法等策略将这些结果组合在一起[21].基于正则化的融合技术通常利用空间信息构建一个正则项,加入到原始的目标函数中[22].
本文提出了一种基于谱-空图嵌入降维的多核融合分类算法(如图1所示),属于特征级融合方法.该算法主要由三个步骤组成:首先,将训练集中的每个像素点作为顶点,每个顶点用对应像素的光谱特征描述,以此构造一个光谱图,利用图嵌入模型求得一个低维投影矩阵;其次,利用主成分分析模型提取高光谱图像的第一个主成分,并将其划分成不同大小的超像素块,以每个超像素块为顶点,每个顶点用超像素块中所有像素点的平均值来描述,从而构造一个空间图,使用图嵌入模型再次求得一个低维投影矩阵;最后,对于高光谱图像中的每个像素点,可用两个不同的投影矩阵分别求得其对应的低维特征表示,利用多核学习的方法对两者进行融合,自适应学习两种特征的融合权重,可提升后续SVM分类的准确性.
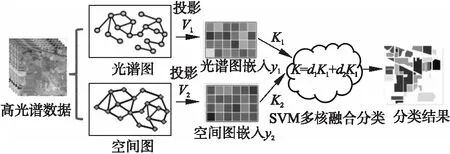
图1 本文算法框图
2 图嵌入模型
假设矩阵X=[x1,x2,…,xn]∈Rm×n表示由n个数据组成的训练集,其中,m为每个数据的特征维度.降维的目的是利用给定的数据将X∈Rm×n投影为Y∈Rd×n,其中,d≪m.给定投影矩阵V,线性降维可表示为:Y=VTX.
图嵌入模型基于谱图理论,旨在保持数据之间的几何结构,其目标函数可以写成如下形式:
(1)
式(1)中,yi和yj分别表示样本xi和xj的低维投影,权重矩阵W中元素wij表示xi和xj之间的连接权重,若顶点间没有连接,则权重wij=0.
为了去除尺度的影响,图嵌入模型通常需要添加额外的约束项,比如VTXDXTV=I.因此,(1)式可以重新写成如下形式:

(2)
式中,tr(·)表示矩阵的迹,D为对角矩阵,其对角元素为Dii=∑jwij,L=D-W为图拉普拉斯矩阵.式(2)的解可通过求解泛化的特征值问题获得:
XLXTV=λXDXTV
(3)
3 本文算法
针对高光谱图像中丰富的谱-空信息,本文提出了一种谱-空图嵌入模型.首先,分别利用光谱和空间信息构造两个不同的图:光谱图和空间图.然后,利用图嵌入模型提取每个像素的光谱特征和空间特征.最后,利用多核学习的方式对光谱和空间特征进行有效融合.
3.1 谱-空特征嵌入

为了减少光谱信息间的冗余性,本文采用图嵌入模型对光谱特征进行进一步提取.具体而言,以H中的像素为顶点构造一个光谱图,任意两个顶点xi和xj之间的权重通过“热核”函数求解:
(4)
其中,N(xj)表示xj像素的k个最近邻像素,t为“热核”函数的尺度参数.由式(4)中求得的wij可推导出光谱图拉普拉斯矩阵L1,代入式(2),可得投影矩阵V1.
类似地,可以通过H中的空间信息构造一个空间图.由于H中通常包含不同大小和形状的目标物体,因此采用固定大小的空间邻域进行特征提取很容易造成信息的丢失.基于超像素的方法[23]能够很好地解决此类问题,每个超像素的大小和形状可根据局部结构信息自适应地调整.过分割是形成超像素块的常用方法,受文献[24]启发,本文采用基于熵率的超像素分割方法生成超像素[25].为了减少计算量,首先利用主成分分析模型提取H的第一个主成分H1∈Rw×h,然后采用文献[25]中的方法对H1进行过分割,整个过程如图2所示,其中白色的分割线即为超像素的轮廓.
在得到超像素后,以它们为顶点,构建空间图.图中任意两点的权重同样可由式(4)求得,此时xi和xj为第i和第j个超像素中所有像素的平均值.最后,利用式(2),可得第二个投影矩阵V2.对于H中的任意一个像素点xk∈Rm,其光谱和空间特征可分别表示为:
(5)
3.2 谱-空特征多核融合
谱-空特征融合的主要目标是通过多核方法自动地学习融合权重d1和d2,使得生成的融合特征为:
(6)
(7)

(8)
式(8)可看作一个典型的多核学习问题.为了同时优化融合权重d1和d2,以及拉格朗日乘子αk和αl,本文采用Simple MKL算法[26]进行求解.
进一步本文依据一对多(one-verse-all)策略,由(8)式训练C个二分类SVM,其中第i(1≤i≤c)个SVM分类器将输入样本分类为第i类与非i类.要判别测试样本属于哪一类,需把该样本分别代入C个SVM分类器中,取值最大的那个类别就是测试样本所属类别,进而实现C类样本的分类.高光谱图像的谱-空图嵌入与多核分类算法完整流程如下:
算法1.谱-空图嵌入的高光谱图像多核分类算法
输入参数:高光谱图像H∈Rw×h×m及其类别标签,
Step1.构建光谱域图,由(4)式计算光谱图权种矩阵;
Step2.由(2)式求解得到光谱域投影矩阵V1;
Step3.采用熵率分割生成超像素,构建空域图,计算空间图权种矩阵;
Step4.根据(2)式求解得到空间域投影矩阵V2;
Step5.根据(5)式计算降维后的光谱和空间特征
Step6.由(6)式生成降维后的融合特征;
Step7.由(7)式计算融合权重与SVM分类器(二分类)
Step8.依据一对多策略,训练C个SVM分类器
输出:投影矩阵V1,V2,C个SVM分类器(二分类)
4 实验结果与分析
4.1 实验数据
为了验证本文方法(简称SSGE)的有效性,本实验在两个通用的数据集上进行了测试.第一个数据集为Indian Pines(IP),该数据由AVIRIS传感器观测美国印第安纳西北部地区所得,获取时间为1992年6月12日.原数据包含224个光谱波段,去除4个含有0值的波段以及20个受噪声干扰的波段,利用剩余200个波段进行实验.该图像的空间分辨率为20米,大小为145×145,每个像素对应一定类型的地面覆盖物,总共包含16种,如Alfalfa(苜蓿)、Corn(玉米)、Wheat(小麦)等等.图3(a)展示了由波段57,27和17组成的三波段伪彩色图.表1给出了IP数据集中样本分布情况,第二列为数据集中各类地物所包含的样本总数,并将其分为训练集与测试集.第二列与第三列分别给出了后续实验中针对各类像素所使用的训练样本数与测试样本数.
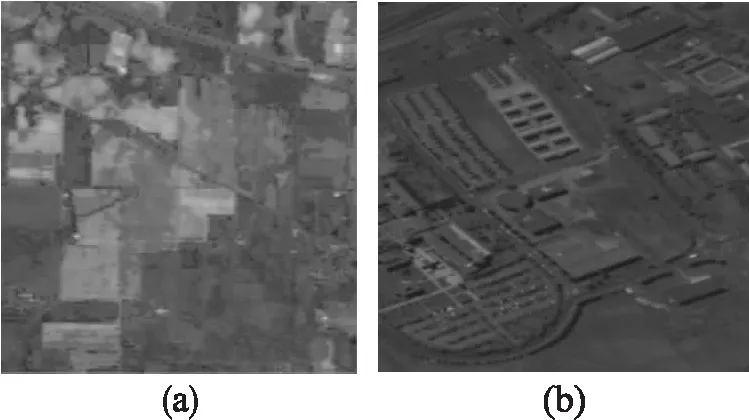
图3 IP数据集(a)与PUS数据集(b)的伪彩色图
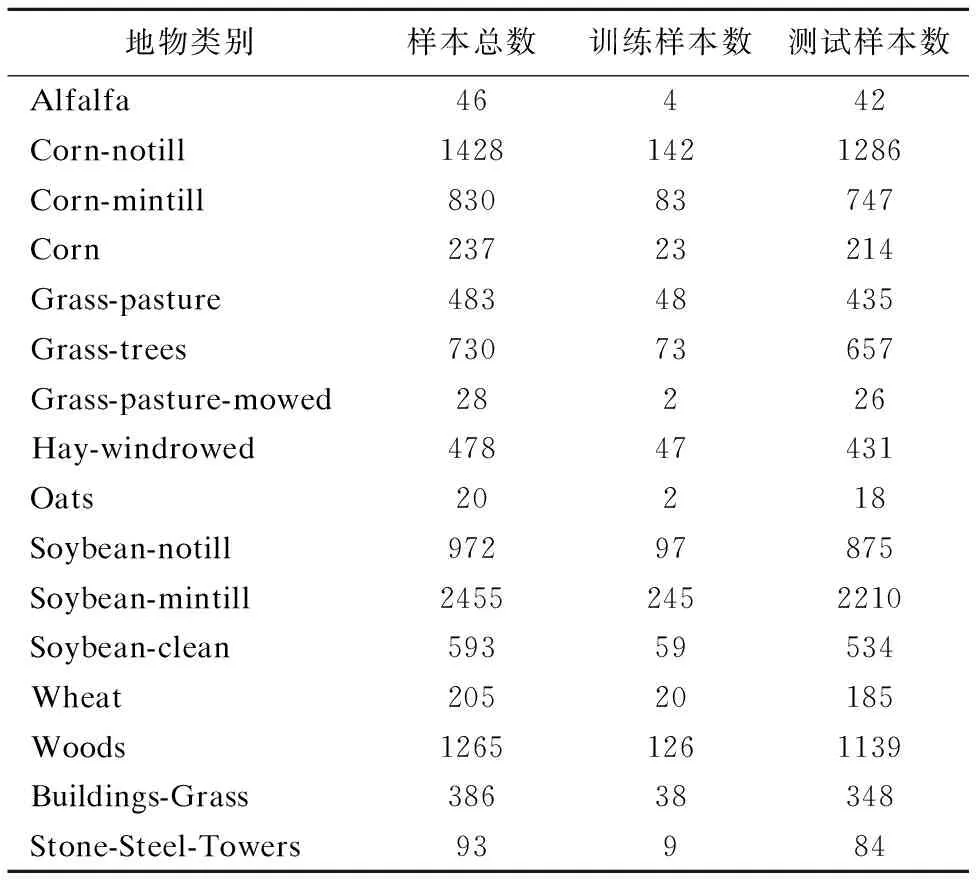
表1 IP数据集中样本分布情况
第二个数据集为Pavia University Scene(PUS),该数据为ROSIS传感器于2002年7月8日,观测意大利北部帕维亚大学所得.原影像包含115个光谱通道,覆盖了0.43微米的可见光波段到0.86微米的红外波段.去除含有噪声的波段,利用其它103个波段进行实验.图像大小为610×340,空间分辨率为1.3米.图3(b)了三波段(90,60和40)伪彩色图和类标图.表2详细记录了PUS数据集各类样本(如:Asphalt(沥青)、Meadows(草地)等)的分布情况以及实验中所使用的训练样本数与测试样本数.
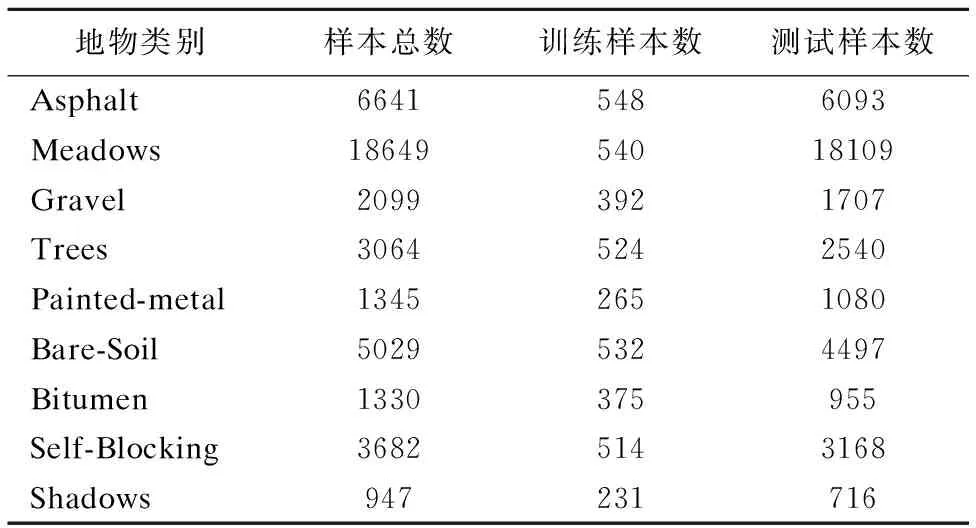
表2 PUS数据集中样本分布情况
4.2 实验结果
为了验证本文SSGE算法的性能,与四种不同的方法进行了对比,即广泛使用的主成分分析法(简称PCA)、光谱图嵌入法(简称SpeGE)、空间图嵌入法(简称SpaGE)以及串联光谱图嵌入特征和空间图嵌入特征法(简称SpeSpa).对于这些方法,降维后的数据维度为5到50之间.分类器选用支持向量机模型[20],核函数选用径向基核函数,其参数采用交叉验证的方法从候选值{10-3,10-2,…,103}中进行筛选.式(4)中的参数t和k分别设为1和5.所有算法的分类性能通过整体分类准确率(OA)、平均分类准确率(AA)、每类分类准确率和Kappa系数进行度量.
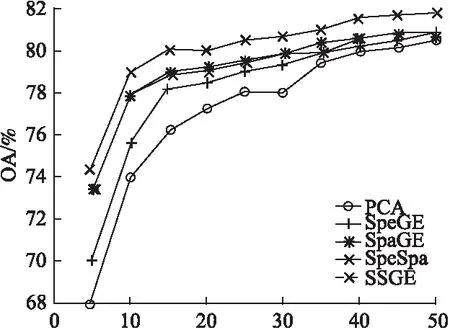
图4 不同方法在IP数据上准确率随维度的变化

图5 不同方法在PUS数据上准确率随维度的变化
图4和图5展示了四种算法的OA在两个数据集上随维度的变化情况.从中可以看出,不同方法的OA随着维度的提高先呈现增长的趋势而后趋于稳定,因为维度过低时,会造成判别信息的丢失,而维度过高时又会存在信息冗余的情况.与PCA和SpeGE相比,在相同的维度下,SpaGE能够获得更高的准确率,说明对于这两幅高光谱图像,空间信息比光谱信息更重要.此外,将光谱信息与空间信息直接串联在一起,获得的分类结果与SpaGE接近,并没有充分发挥两种特征的优势.与之不同,当用多核学习融合两种特征时,SSGE能进一步提升分类性能,充分证明了本文算法的有效性.
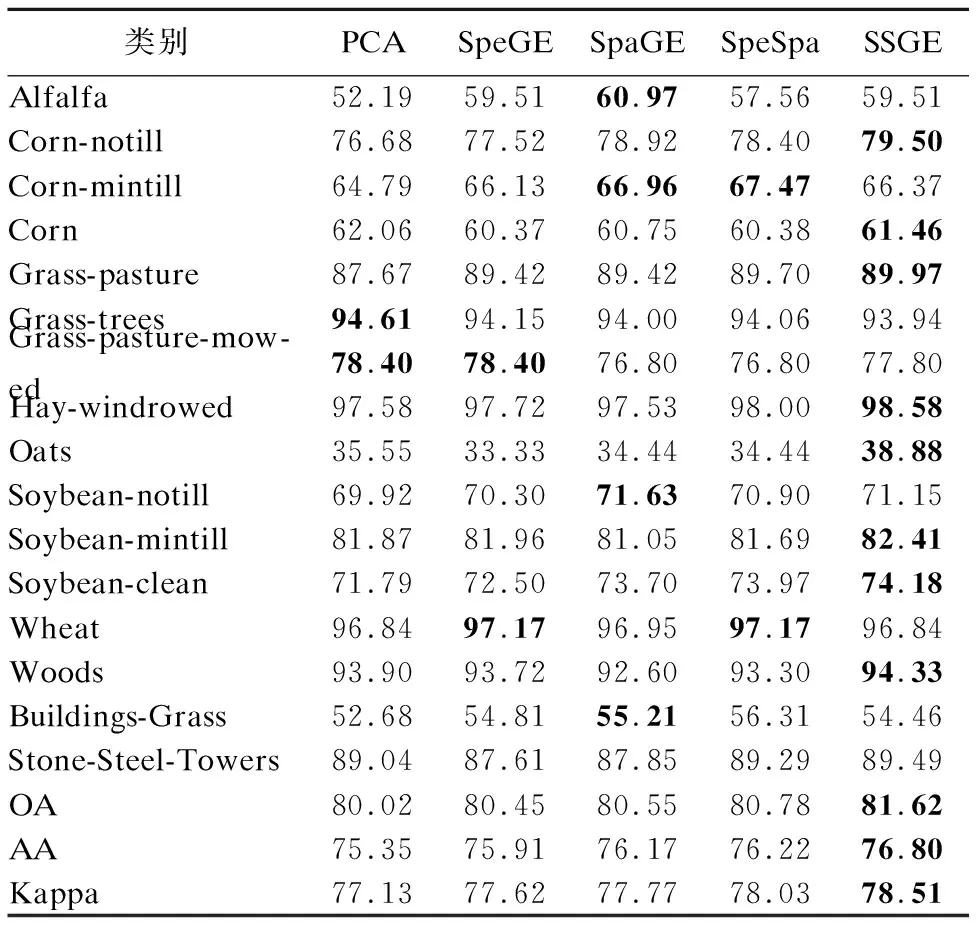
表3 不同方法在IP数据集上的分类结果
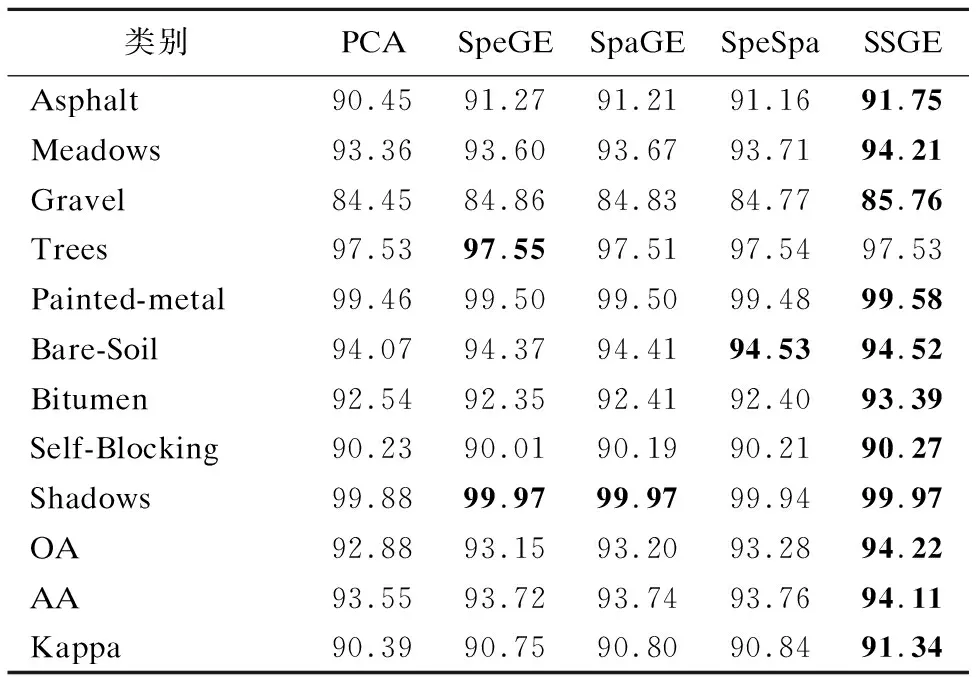
表4 不同方法在PUS数据集上的分类结果
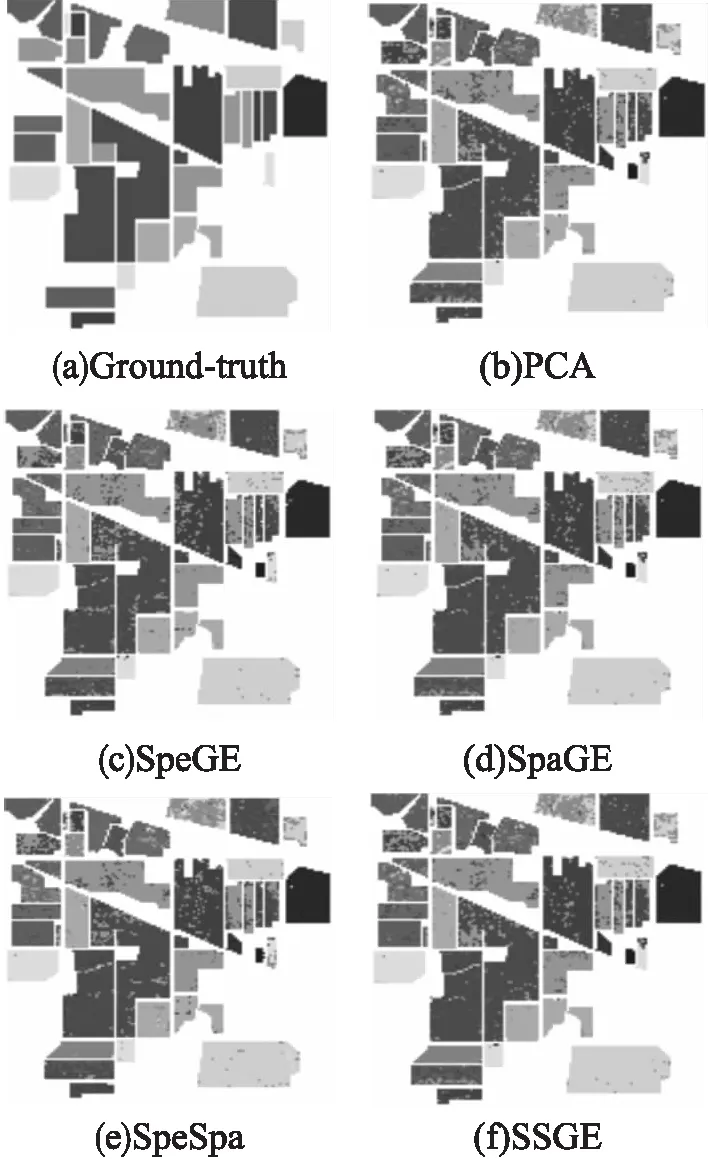
图6 不同方法在IP数据上的可视化结果
为了验证算法的每类分类结果,表3和表4测试了当数据维度降为40时,不同方法的分类准确率,黑色加粗字体表示同一类中最高的分类结果.与其它方法相比,SSGE在大部分类中都能获得最高的分类结果,进一步证明了SSGE算法的优越性.此外,图6和图7对分类结果进行了可视化,图6(a),图7(a)分别给出了两个数据集的真实类标图(ground-truth),对比真实结果,SSGE能够获得更加平滑均匀的结果,异常点明显少于其它几种算法.
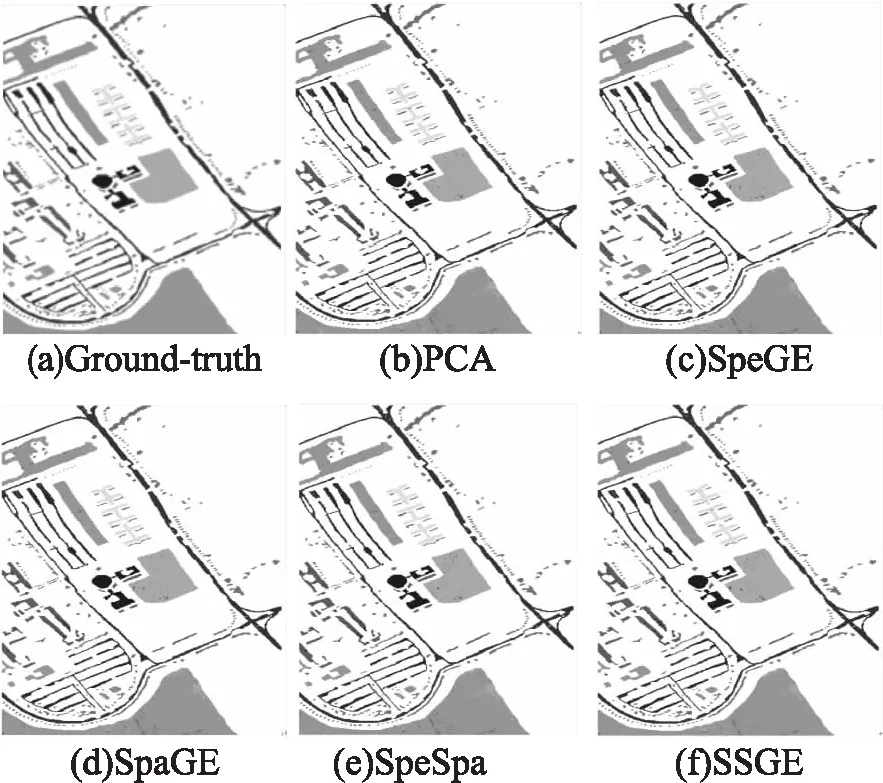
图7 不同方法在PUS数据上的可视化结果
5 结束语
本文提出了一种谱-空图嵌入的降维算法,用于有效提取并融合高光谱图像的光谱和空间信息.利用光谱信息和空间信息分别构造光谱图和空间图,再将构造的图送入图嵌入模型进行特征提取,最后使用多核学习的方式将提取到的光谱和空间最优地组合起来,从而得到良好的分类效果.本文的分类算法可推广应用于电力监测、电力规划等领域,提供有效的地物分类支撑.
猜你喜欢
艺术家(2023年8期)2023-11-02 02:05:28
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:25:56
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
中学生数理化·七年级数学人教版(2019年4期)2019-05-20 10:06:32
中学生数理化·七年级数学人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年级(2017年9期)2017-10-13 22:27:46
CHIP新电脑(2016年3期)2016-03-10 14:22:03
中国光学(2015年5期)2015-12-09 09:00:28
