
基于因特网的远程控制系统设计
2018-11-13 05:54张亮江苏中煤矿山设备有限公司
数码世界 2018年10期
张亮 江苏中煤矿山设备有限公司
引言:因特网应用一般以传输、交换和发布静态信息为主,如文本、图像和储存的视频信息。随着有线网络和无线网络技术水平的迅速提高,因特网正逐渐成为可接受的且离不开的强大技术。人们已不再被限制在办公室里处理日常事务,取而代之的是,无论在什么地方都能够使用网络办公。目前己经开发出很多小的可移动互联网设备,如掌上电脑和可上网的多功能手机等。井于网络的应用领域日益扩大,吸引了学术界和工业界越来越多的注意力。本文以远程交通控制系统设计为例来讲述。
1 基于因特网远程控制的特点和意义
1.1 基于因特网远程控制的特点
与以往的控制系统相比,基于因特网的远程控制系统具有以下几个特点:
(1)结构网络化网络控制系统支持如总线型、星型、树型等拓扑结构,与分层控制系统的递阶结构相比,显得更加扁平、简洁。
(2)节点智能化带有的智能化节点之间通过网络实现信息传输和功能协调,每个节点都是组成网络控制系统的细胞,各自具有相对独立的功能,有计算、分析、处理和通信的能力,能对其管辖范围内发生的事件做出反应,具有局部控制能力,整个系统各节点之间的协调则通过节点间的通信来完成。
(3)控制现场化和功能分散化网络化结构使原先由中央控制器实现的任务,下放到智能化现场控制设备上,这使危险因素得到了分散,从而提高了系统的可靠性和安全性。
(4)系统开放化和产品集成化远程控制系统的开发是遵循一定标准进行的,是一个开放性的系统,只要不同厂商根据统一标准来开发自己的产品,这些产品之间便能实现互操作和集成。
综合上述的特点,网络远程控制系统在资源共享、远程操作与控制上的优势是传统控制无法比拟的。此外,物理上的连接简单,便于系统的安装、维护与升级,以及故障诊断,同时缩减了开支。信号的数字化传输,也使得信号的抗干扰性能大大增强,因此受到人们的关注。
1.2 基于因特网远程控制的意义
传统的自动控制系统中的信息采集、传送和处理是一个自成封闭的专用系统,这和集中、封闭的生产方式和规模是相适应的。伴随着经济发展全球化的推进和与此相适应的信息技术、因特网技术的飞速发展,信息互连技术己更深层次地渗透到社会经济的各个领域。融合了控制理论和网络技术的基于因特网的远程控制技术的研究顺应了时代科技和经济发展的需要,可以说它是自动控制理论和技术今后一个重要的研究方向之一。
将因特网引入控制系统,打破了控制信息进行传递和交换时在时间和空间上的限制,从而构筑真下意义上的远程控制系统,实现任何人在任何时间对位于任何地点的设备进行远程控制。工信息网络与自动化层控制网络的系统集成,也将成为控制系统结构的一个新的发展方向,不仅可以为企业的管理和生产带来很多方便,提高企业的生产效率,而且为控制网络走向全开放性、全分布式的网络结构奠定了坚实的基础。
而且,因特网的高速普及,在社会生活的各个领域里也必将产生巨大的影响。例如随着信息家电的出现,通过远程控制系统人们可以对设备进行远程监控和调节,还有诸如远程教学、远程医疗、移动办公等等。目前,基于因特网的远程控制系统的研究越来越受到世界各国研究人员的重视。
2 远程控制系统及其主要性能
2.1 实时性
实时性是远程控制系统的一个比较重要的性能指标。如果由于某种原因,使得远程控制者的控制命令不能马上由被控设备执行,造成设备动作的不连续,就会影响控制系统的正常运行另一方面,被控设备的反馈数据不能及时传送回远程监控终端,也会导致远程控制者在判断被控设备运行状态时出现偏差。这些情况都会直接造成远程控制系统的性能不可靠。
2.2 可靠性
可靠性是远程控制系统的又一个重要的性能指标。系统可靠性通常是指该系统在规定大条件下,在规定的时间内完成规定功能的能力。基于因特网远程控制系统的可靠性只要是指系统的三个组成部分,即远程监控终端、数据传输通道和本地控制系统运行的可靠性。其中,数据传输通道的传输可靠性至关重要,其主要取决于所采用的传输位议、传输介质及传输方式等因素。
2.3 稳定性
稳定性是指本地控制系统在远程监控终端的远程控制下,能够稳定地运行,避免出现震动、中断、跳变等不正常现象。影响系统稳定性的因素主要包括以下几种一是由于传输时延的影响,本地控制系统在执行完一条控制指令后,没有及时接收到下一条控制指令,从而产生控制过程的中断,如果本地控制系统没有对该中断做出相应的补救措施,就有可能导致不可预测的结果二是当本地控制系统出现异常情况后,需要远程监控终端给出修正,而传输时延会使异常在控制现场得不到及时有效的终止,从而出现不可预测的结果三是数据传输的错误造成系统出现不稳定状况,数据传输通道可能会由于外界干扰等原因出现数据传输错误,从而影响系统的控制稳定性。在具体应用中,还可能存在许多其它因素影响远程控制系统的稳定性,需要我们具体问题具体分析。
3 远程交通控制系统总体设计
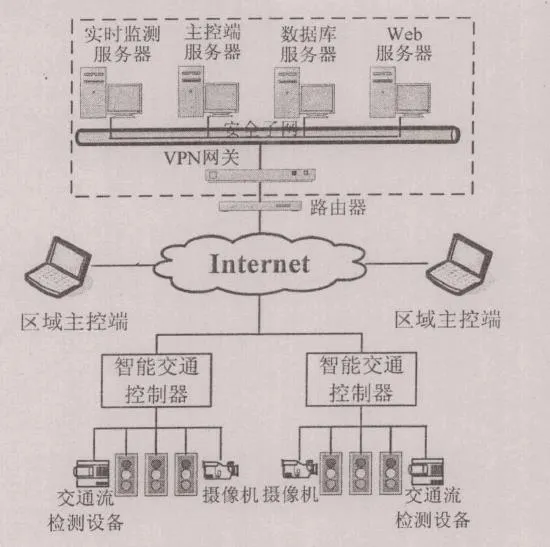
图1 远程交通控制系统总体结构图
整个远程交通控制系统由中央监控端、区域监控端、通信网络、智能交通控制设备、交通信号灯、路口摄像机及路口交通流信息采集设备组成。中央监控端、区域监控端对实时交通进行监控并整体优化,工作人员执行的操作经过编码后以固定据格式通过通信网络传输到智能交通控制设备,其根据既定的协议对接收的命令进行解释,并执行指令所规定的具体操作,同时将路口现场各设备状态和操作信息反馈到远程控制端。整个远程交通控制系统的结构如图所示。
系统中,各主控端为客户端,智能交通控制器为服务器。智能交通控制器的主要功能有根据既定优化交通控制方案实施路口交通控制及时响应远程服务请求`并做出相应的应答根据接收到的控制命令信息,对交通信号灯的相位和摄像机的位置进行精确的控制获取摄像机拍摄的交通路口实时图像信息并回传远程监控周期性回传路口交通流信息数据等。
结语:综上所述,随着基于因特网远程控制研究的进一步深入,特别是高速因特网性能的不断改善和高速因特网应用的快速普及,基于因特网的远程控制理论和应用将会有着强大的生命力和美好的发展前景。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代妇女(2022年5期)2022-05-25
汽车实用技术(2022年4期)2022-03-07
英语文摘(2021年11期)2021-12-31
建材发展导向(2021年15期)2021-11-05
学生天地(2018年19期)2018-09-07
北京航空航天大学学报(2017年6期)2017-11-23
小学生作文选刊·低年级版(2016年8期)2016-08-06
创新时代(2016年5期)2016-06-07
通信产业报(2009年1期)2009-06-09
