无人值守综合监控服务系统平台的设计与实现
2018-11-09 02:49:40付传宝
山西电子技术 2018年5期
闫 军,付传宝
(中国电子科技集团公司第三十四研究所,广西 桂林 541004)
0 引言
随着信息技术的迅猛发展,战争的形态和运行规律也发生了重大变化,从而引发了各国对边境防御的重大变革。传统的人员对边境进行巡逻防御的方法已经很难适应信息化时代的要求,于是建立在现代化信息技术基础上的无人值守站点防御系统成为一种趋势。
然而由于技术发展的局限性,目前无人值守系统的监控部分仅能提供现场监视等简单功能,传感遥测设备也只能提供比较有限的信息,特别是大多情况下监控系统和传感系统是相互独立运行进行被动防御[1],这些因素的存在无疑降低了无人值守站点的防御能力。
基于此,本文提出了一种无人值守综合监控服务系统多层架构平台,解决了无人值守系统内部对多种形式数据的采集、传输、处理和控制以及系统间信息共享的问题,实现了监控系统、传感遥测和主动防御三者协同工作的目地。
1 系统平台设计方案
1.1 总体方案设计
在各无人值守站点中部署综合监控服务系统,对站点中的设备、环境、供电、安全等信息进行实时监控,监控信息经采集、过滤、处理、分析操作后,一方面将其保存在系统服务管理层的数据库中,作为历史信息备份;另一方面传输给控制层的哨位,作为站点监控信息实时显示。该方案的总体架构设计如图1所示。
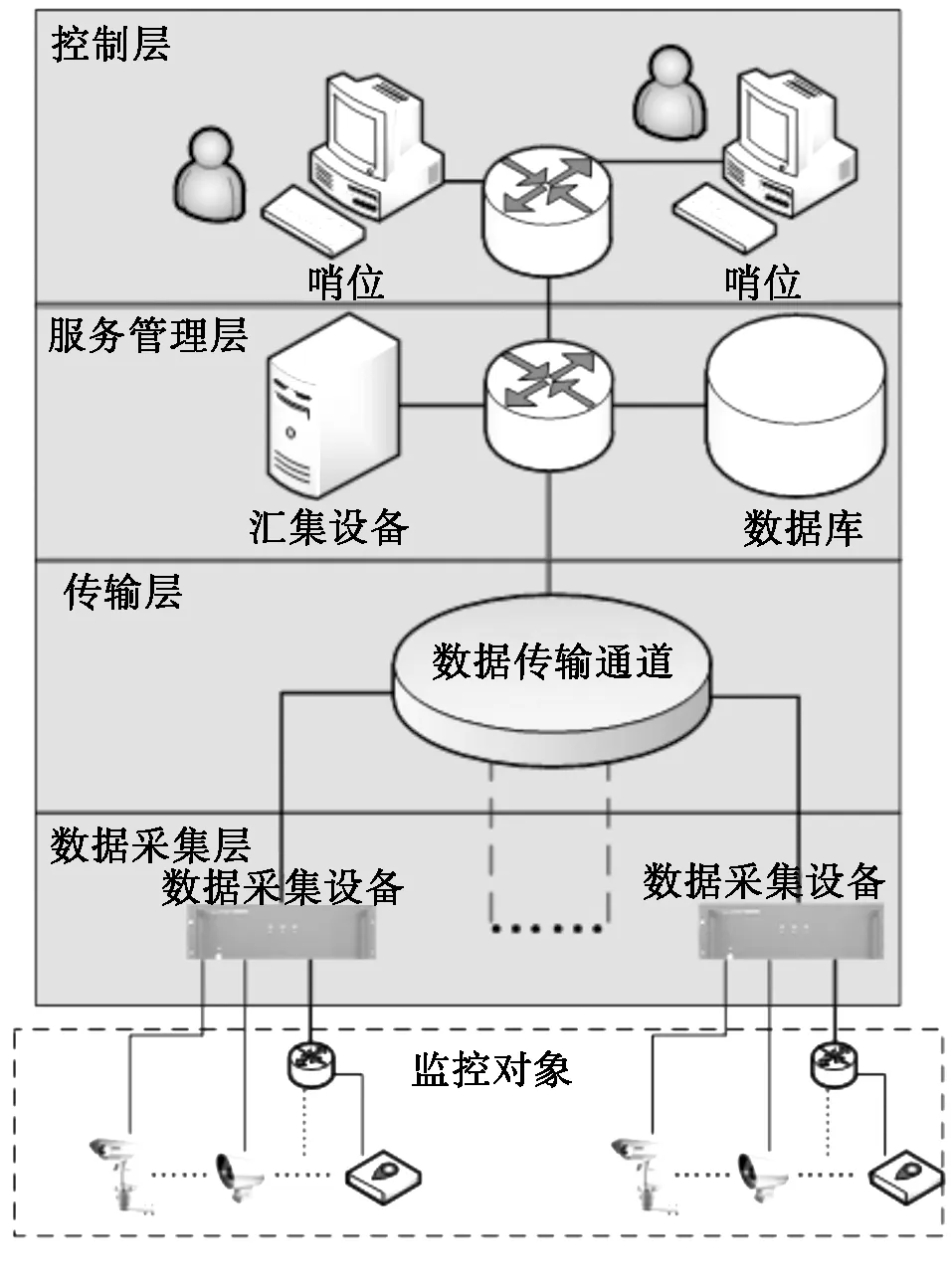
图1 无人值守综合监控服务系统体系架构
1.2 多层架构平台的系统设计
无人值守综合监控服务系统多层架构平台主要实现站点信息的监测和安全防卫,该系统体系结构由上至下分为控制层、服务管理层、传输层和数据采集层。
1.2.1 控制层
控制层是与管理人员交互最密集的一层,该层依托哨位监控软件为控制中心提供整个片区内所有站点的监控信息。控制层主要完成的功能如图2所示。
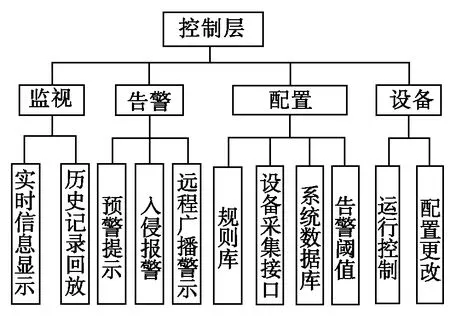
图2 控制层功能
1.2.2 服务管理层
服务管理层根据系统配置信息,对监控数据进行过滤、处理、分析、存储等操作,同时也会与其他系统进行信息资源的共享。该层主要包括了汇集设备和数据库,汇集设备负责接收数据采集层传输的监控信息,然后按照规则库中的策略对其进行分析处理形成模块数据,该模块数据一份上传给数据库进行备份,另一份发送给控制中心的哨位或其他系统中的汇集设备。
此外,服务管理层还对系统内多个哨位占用资源执行权限的问题进行处理,系统外则处理本系统资源是否为其他系统开放的问题,上述问题的解释过程通过系统配置信息和规则库设定,执行过程由汇集设备负责完成。
1.2.3 传输层
传输层主要负责整个系统网络数据的传输,除了具备网络传输必备的功能外,还具有协议转换功能。在该层中的不同网络区域都配置了一套代理服务设备,用于二层和三层协议之间的相互转换,以此来统一规范数据采集层收集到的数据信息的传输格式,使信息可以在更广的范围内进行传输。
1.2.4 数据采集层
数据采集层负责从监控对象中进行信号采集、压缩、打包,形成能够在以太网中进行传输的TCP/UDP包或系统自定义网络数据包。
数据采集的方式分为两种[3],实时采集和周期采集,其中实时采集方式以命令触发的形式进行,能够实时捕获监控对象当前的状态;周期采集方式以执行计划或任务的方式定期对传感器、电源等监控对象进行分析,获取当前状态下的监控信息,采集周期将根据具体配置要求在规则库中指定。
2 多层架构系统平台的实现
无人值守综合监控服务系统多层架构平台由监控对象、监控信息处理模型、规则库和监控哨位组成。具体功能模块有数据采集模块、数据过滤模块、数据处理模块、协议转换模块、规则设计模块、数据分析模块、信息显示模块、预警模块、设备控制模块和历史回放模块等,如图3所示。
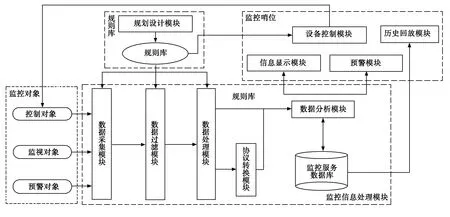
图3 多层架构平台的功能模块
2.1 数据采集模块
数据采集模块负责采集监视对象、控制对象和预警对象三种数据源发送的消息数据,这些消息数据通过不同的接口汇集到该模块中,然后经过压缩、编码、组合、打包等步骤形成以太网数据包。
2.2 数据过滤模块
数据过滤模块对接收到的网络数据包进行有效数据提取,根据规则库的配置策略对数据过滤,解析出系统关注的信息。过滤的执行流程如图4所示。
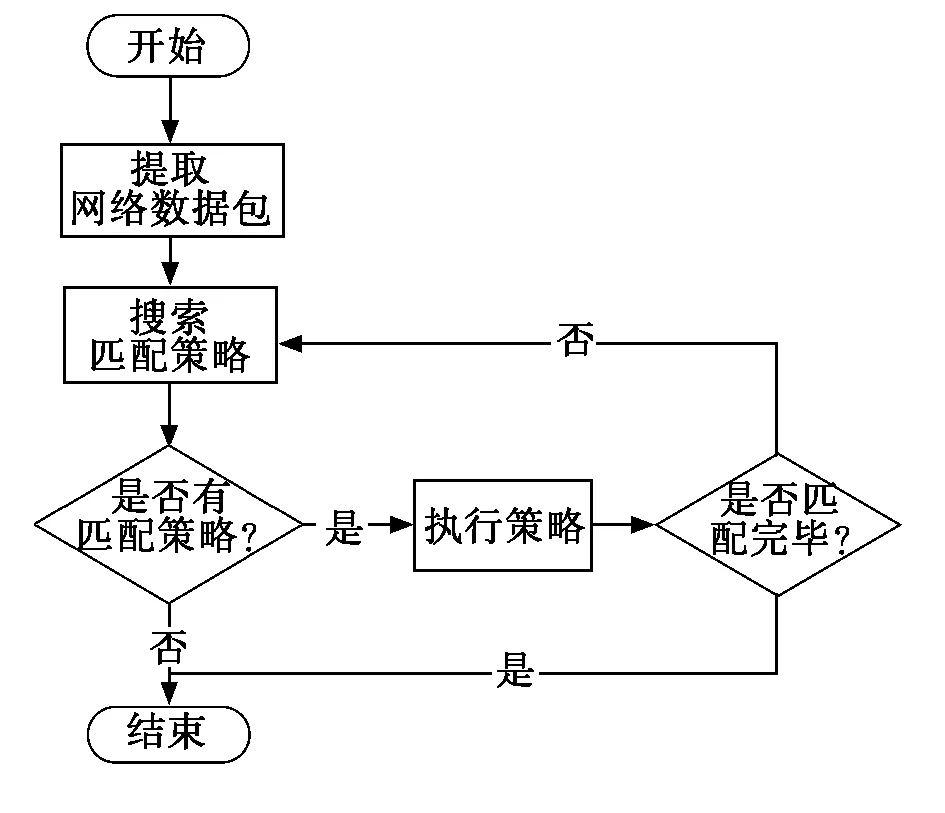
图4 数据过滤模块执行流程
2.3 数据处理模块
数据处理模块负责将过滤模块提取出来的有用信息进行模块化组合,形成能够在数据库和数据分析模块中识别的格式。另外,对于某些信息的处理还需要调用规则库中的转换规则进行数据格式转换,如气象传感器反馈的信息,就必须首先按照规则库中的配置策略提取转换规则,按照该规则对温度、湿度、风力等参数进行转换,构造成协议要求的格式向下一模块发送。
2.4 协议转换模块
该模块主要作用于系统自定义网络数据包,完成二层和三层协议之间的相互转换功能,使得该数据包脱离了局域网传输的限制,能够在广域网中进行传输,很大程度上拓展了系统运用的范围。
2.5 规则设计模块和规则库
通过规则设计模块,对规则库中的配置进行设置维护,主要维护信息如表1所示。
规则库配置的原理为设置一个或多个条件,当满足这些条件时将会触发一个或多个操作。规则通常包括两部分[4],即一组条件和在此条件下执行的动作,其实施过程统一表现为对条件的检测以及在条件成立时的动作执行,可以使用产生式规则表示法对规则库中的规则进行配置和维护[5]。
产生式规则常用于表示具有因果关系的知识[6],其基本形式是“ifPthenQ”,其中P代表一组前提或状态,Q代表若干结论或动作,其含义是如果前提P得以满足,即为“真”,则可得出结论Q或Q所规定的动作。
产生式规则可用以下公式表示:

式中:m,n>1,k=1,2,…,r。Rk为第K条规则,Ck为第K条规则的结论。

表1 模块维护信息表
2.6 数据分析模块
该模块通过数据库中保存的系统配置信息,来判决处理模块发送来的数据,处于设定的哪个阈值区间内,由此将结果提交给信息显示和预警模块,提示控制中心注意。在无人值守综合监控服务系统中,将判决分析结果分为四个级别:正常、警告、紧急和危急。
2.7 设备控制模块
设备控制模块主要完成对设备的远程操控功能,需要注意的是,系统内外在同一时刻只能有一台哨位对控制对象进行操作,只有在该哨位放弃操作权后,其他哨位才能执行动作,具体的执行算法如下所示。
定义1. 哨位由编号、权限、动作和命令组成,可表示为一个四元组:P=(id,w,R,c),其中R=(cd,cs)是哨位动作R的触发时间cd和执行结果cs。
定义2. 如果哨位P中动作R的触发时间cd为0,则动作R的执行结果cs为假,即
P:R(cd)=0→R(cs)=FALSE
定义3. 如果哨位P中命令c为真,则动作R的执行结果cs为真,即
P:P(c)=TRUE→R(cs)=TRUE
假设当前哨位α正在执行,哨位β请求获取执行权限,执行过程如下:
ifα(w)≥β(w)
ifα(R(cs))=TRUE
outputα(id)
else
outputβ(id)
endif
else
outputβ(id)
endif
3 结语
本文提出了一种无人值守综合监控服务系统多层架构平台的技术解决方案,在该平台当中,按照规则库中的配置策略和系统数据库中的协议约定,监控信息处理模型对监控数据进行模块化处理,监控哨位进行入侵预警、信息显示、设备操控以及历史回放等动作,三者结合共同完成对监控对象中多种形式数据的操作。本系统平台已经在国家某国防工程中得到了应用,下一步的工作将是研究如何实现与其他外部系统的信息交互,进一步拓展该系统平台的功能。
猜你喜欢
文萃报·周二版(2024年5期)2024-02-20 10:29:25
科普童话·学霸日记(2022年1期)2022-05-30 10:48:04
科普童话·学霸日记(2022年1期)2022-05-30 10:48:04
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
民族音乐(2018年4期)2018-01-24 22:12:47
军事运筹与系统工程(2017年4期)2017-08-29 01:07:42
物流技术与应用(2017年3期)2017-05-17 05:29:04
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34