
基于LabVIEW的微电机转速测量
2018-11-09 07:43:52郭爱芹
建材与装饰 2018年43期
郭爱芹
(广州市市政工程试验检测有限公司 广东广州 510000)
1 研究背景及意义
智能腿是机器人学和生物医学工程学领域中一个非常重要的研究课题。自20世纪90年代初起,英国和日本率先将微电子技术、计算机控制技术与生物医学工程技术融合在一起,相继研制出了智能腿并已投入临床应用。
智能腿带有的微电机,能帮助定位智能腿摆动角度和控制行走速度,改善智能腿行走流畅度,以达到正常步态的功能。所以滤掉各种干扰信号,更加精准的测量微电机的微小转速,可以帮助实现上述功能,测量微电机的转速对于加快智能腿的研究具有非常重要的意义。其中以单片机为核心的智能腿,与用户的交互以及功能的修改都很不方便,而LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种用图标代替文本行创建应用程序的图形化编程语言,可以根据需要做出相应的功能调整。故用LabVIEW测微电机的转速,对智能腿的研发和调试,意义重大。
2 LabVIEW简介及测量原理
2.1 LabVIEW介绍
LabVIEW是一种用图标代替文本行创建应用程序的图形化编程语言。传统文本编程语言根据语句和指令的先后顺序决定程序执行顺序,而LabVIEW则采用数据流编程方式,程序框图中节点之间的数据流向决定了VI及函数的执行顺序。VI指虚拟仪器,是LabVIEW的程序模块。
LabVIEW提供很多控件,可用来创建用户界面,方便与用户的交互。用户界面在LabVIEW中被称为前面板。使用图标和连线,可以通过编程对前面板上的对象进行控制,这就是图形化源代码,又称G代码。LabVIEW的图形化源代码在某种程度上类似于流程图,因此又被称作程序框图代码。
2.2 LabVIEW特点
在一个硬件的情况下,仅通过改变软件,就可以实现不同的仪器仪表功能的切换,非常方便,是相当于软件即硬件,对功能的修改非常便利,即便于智能腿的调试。
2.3 测量原理
基于LabVIEW应用软件,设计了一个微电机转速测量系统。由于实验室条件所限,在软件中设计了转速生成器,输出带有干扰信号的微电机转速信号,以模拟真实的微电机转速信号。微电机转速信号经过滤波后,进入信号收集器,做后续的信号检测分析。记录程序同时运行,记录测量微电机转速的日期和时间以及微电机转速的波形图和数据、状态开关等。
3 程序设计
程序分两部分:登陆系统和转速测量及记录系统。系统设计用LabVIEW实现,LabVIEW前面板的控件方便与用户的交互,图形化编程方便功能的修改,便于调试。
3.1 登陆系统
登陆系统前面板设置输入账号和输入密码两个文本框以及登陆和注册两个按钮,并且登陆成功后会弹出“登陆成功”对话框。与用户交互的一系列功能,都是通过LabVIEW图形化编程对前面板控件的控制实现的。
3.2 转速测量及记录系统
微电机转速由光电传感器检测到转速信号后送入信号收集器,由于转速信号带有干扰信号,需要先进行滤波,然后在对转速信号进行检测分析。为便于分析,不仅在前面板设置了记录开始、停止、打印等按钮,还设置了振幅、频率、瞬时幅值等相关的文本框,记录相关的数据;为了便于观察信号的变化,放置了多个示波器,记录不同时期的波形。对前面板的控件进行LabVIEW进行图形化编程,以实现微电机转速的测量和记录。转速测量及记录系统程序框图,如图1所示。

图1 转速测量及记录系统程序框图
4 调试结果
系统相关的功能设置完成后,对系统进行调试。首先进入登录系统界面,若有账号,直接输入账号和密码然后点击登录,即可登陆成功,若无账号,先点击注册按钮,注册账号后再输入账号和密码,点击登录,即可登录成功。如图2所示,弹出登录成功界面,点击进入按钮,跳转到转速测量及记录系统,点击记录开始按钮,开始记录各项数据,如图3所示。

图2 登录界面调试结果
登录成功后,进入转速测量及记录系统。点击“记录开始”按钮,记录状态显示为“开”,即开始记录瞬时幅值、变化速度、振幅等一系列数据,波形图开始记录相关的波形变化,点击“打印”按钮,即可打印出一系列变化的数据;点击“停止”按钮,记录状态显示为“关”,波形图的波形保持不变,相关的文本记录不变,记录结束。转速测量及记录系统调试结果,如图3所示。
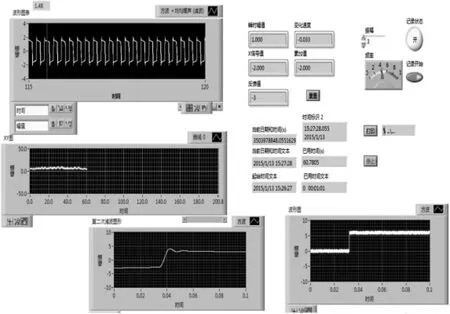
图3 转速测量及记录系统调试结果
5 小结
观察调试过程并记录相关的数据,分析调试结果。由调试结果可知,LabVIEW的图形化编程实现了对微电机转速较好的控制,能较好的实现对智能腿控制角度和行走速度的控制,可以改善智能腿行走的流畅度,较好的达到正常步态的功能,也方便与用户的交互以及功能的修改与调试。故LabVIEW对微电机转速的测量,对智能腿的研究与发展意义重大。
猜你喜欢
电脑报(2021年21期)2021-08-19 17:22:40
电脑报(2019年29期)2019-09-10 07:22:44
电子制作(2018年12期)2018-08-01 00:47:44
铁道通信信号(2018年1期)2018-06-06 02:27:36
制造技术与机床(2017年6期)2018-01-19 02:41:21
电子制作(2017年19期)2017-02-02 07:08:38
当代化工研究(2016年6期)2016-03-20 16:21:46
地理教学(2015年18期)2016-01-06 12:00:40
电网与清洁能源(2015年3期)2015-02-28 16:03:26
无线互联科技(2014年7期)2014-09-24 00:07:42
