基于神经网络和最近邻相似度的动臂实例检索
2018-11-05 02:54闫二乐高领付林述温林航
机械制造与自动化 2018年5期
闫二乐,高领付,林述温,林航
(福州大学 机械工程及其自动化学院,福建 福州 350108)
0 引言
方案设计是一个结构参数多、约束复杂和多目标的工程设计问题。方案设计是最富有创造性的阶段,方案设计的质量会影响动臂的性能。虽然方案设计的实际投入为总开发成本的5%,但是却决定了产品总成本的70%[1]。近年来方案设计的思想、方法和理论有很大的进展,但其在复杂工程机械方面应用较少。传统的方案设计方法主要依靠设计人员的经验通过试凑等方法实现,而对于复杂的工程机械产品需要大量的经验知识,且传统的方案设计依赖设计人员的经验难以满足智能制造新的需求。形态学矩阵方案设计方法,从功能角度分析列举组合方案解,但组合的方案多时难以逐一排除。专家系统在设计复杂的工程机械产品时,知识获取效率低,难以满足复杂的工程机械产品设计。
研究智能设计方法,以机器学习——人工神经网络的方法从历史实例库里面挖掘经验知识和设计规范,推理动臂的结构方案设计——实例推理技术。基于实例推理(case based reasoning, CBR)是当下人工智能方向与专家系统领域很有吸引力的一个方向,其主要的原理是运用过去求解问题的经验和实例来获取当前设计问题的一个类比推理模式[2]。其核心部分包括案例表示、案例推理算法及案例相似度计算3大部分,其应用很广泛,如故障诊断、工程规划和产品设计等领域[3-6]。Ning Lu等提出一种在实例推理过程中2个阶段的实例编辑技术消除冗余实例[7]。罗晨等提出运用UML建模语言实现对实例的表示,并用几何形状和位置拓扑关系并行的推理算法实现对实例推理[8]。陈维克等提出一种动力学优化技术与实例匹配相结合的推理方法,解决切削参数选择的问题[9]。孟秀丽提出将装配实例分解为功能需求、装配行为和过程机制3个层次并依据装配过程类型和零件类型进行相似系数计算[10]。
综上所述,CBR技术的实现方法有很多难点,其中比较重要的难点为:参数权重的设置和检索速度。设计人主观设置权重系数,直接影响推理结果的准确性和实用性。本文提出基于实例推理的动臂结构方案设计,采用概率神经网络的方法对实例进行分类,以专家经验知识和客观数据相结合的方法来确定最近邻法的权重系数,计算实例的相似度,解决权重设置问题,避免了设计人员的主观因素影响实例推理。
1 动臂结构方案设计模型
1.1 初始方案设计参数选择
动臂结构的方案设计主要解决动臂结构类型配置的问题,动臂结构类型直接决定了动臂的性能。配置类型主要包括液压缸分布、动臂的类型(弯动臂、直动臂或分节式)、与斗杆的连接类型等。现有的很多实例与客户需求的类型有相似之处,为运用实例推理技术解决初始方案设计的问题带来借鉴。
初始参数选择也是初始方案设计的一个重要环节,初始参数选择是否合理会影响推理的动臂结构配置方案。通过相关性分析,选择与结构特征关系比较大的参数作为初始方案设计的初始参数:斗容、挖掘机范围(最大挖掘深度、最大挖掘半径、最大卸载高度、最大挖掘高度)、最大挖掘力、使用环境、工作质量8个参数作为实例推理的依据,通过建立的初始方案推理模型推理出实例库中的动臂配置方案,选择“最优秀”的作为动臂结构配置方案,完成动臂的初始方案设计。
1.2 动臂结构方案设计模型
良好的推理机制是准确找到目标实例的前提[11],而推理算法是CBR技术最重要的技术之一。目前最常用的方法有最近邻法、神经网络推理法和知识引导法。其中,最近邻法由于概念清晰、计算简单,被广泛应用于CBR系统中。最近邻法一般分为KNN(k-nearest neighbor)推理和RNN(r-nearest neighbor)推理,这2种方法都比较容易实现,但是在确定权重值(K和R)是其最难确定的。
为了解决权重确定和检索速度问题,本文提出一种将神经网络分类与最近邻法相结合的实例推理的方法。这种方法不仅避免主观确定权重值,而且又提高了推理速度。实例推理模型首先对实例的参数进行约简,选择相关性比较大的属性参数,并进行无量纲化处理。再运用概率神经网络进行分类,确定新需求的实例所在的小类别内,运用最近邻距离法来进行二次检索,确定相似度选择出最优秀的实例作为新设计需求的依据。
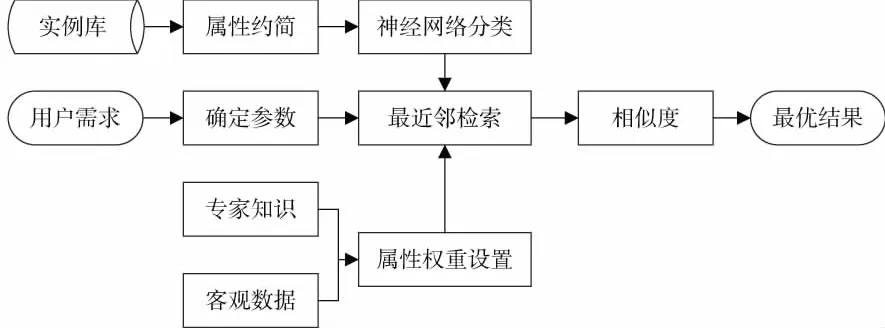
图1 实例推理模型
1.3 动臂结构方案设计的流程
本文中通过收集多种挖掘机品牌动臂结构的实例,涵盖国内外大部分的机型。针对大多数品牌挖掘机的应用环境、功率、结构特点有很多相似之处,对实例库的动臂实例进行聚类分析,实现动臂结构实例的分层次管理。聚类的动臂实例库将相似的动臂合并为一类,消除冗余实例对效率的影响。在进行实例推理时要对动臂实例和结构类型配置方案进行编码,为实例的管理和实例推理奠定基础,具体的工作流程如图2所示。首先对输入的推理模型的初选参数进行归一化处理,消除不同设计参数的量纲的影响;其次将实例输入到概率神经网络中进行训练分类,最近邻法对概率网络的结果进一步选择,最后得到与现有实例最相近的动臂结构类型配置方案。此外以分层次管理对实例推理,并将模型的概率网络的权值和最近邻距离的权值保存到知识库中。
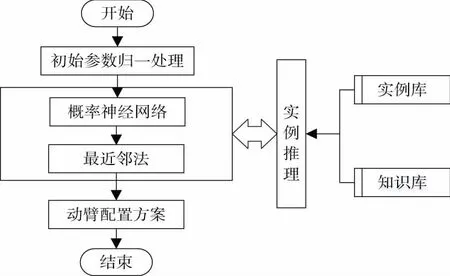
图2 动臂结构初始方案设计流程
2 神经网络训练与实例分类
2.1 编码规则
本文根据新的设计需求的属性参数设计挖掘机动臂结构的配置类。需要对初始方案设计的编码主要是输入参数的编码(实例保存编码)和输出的动臂结构类型配置方案编码,主流编码方法有:二进制编码、Gray编码、浮点编码、实数编码等。其中二进制码主要应用于模式分类,本文实例推理本质是应用到神经网络的分类,因此采用二进制码作为方案的输出编码,而对于输入的实例,采用实数输入。
2.2 动臂结构类型配置
动臂结构初始方案设计主要是实现对动臂结构类型配置自动化配置[12],但是在方案设计之前必须收集动臂所有的结构类型配置,本文总结出动臂结构类型配置树状图,如图3所示。动臂的结构特征整体分为普通型动臂和加长型动臂,其次按其整体的特征分为整体式和组合式,还有与机身的连接方式、液压缸布置等。传统的动臂结构类型配置的设计需要设计人员有丰富的经验知识,为实现方案设计的快速设计,需要从历史的实例中挖掘知识引导动臂结构方案的设计,但是实现实例推理的基础是合理的编码方法和完善的实例库。
从图3可以看出动臂结构形状配置种类很多,每个树状图节点都连接不同的配置类型。为了方便运用概率网络和最近邻距离法进行推理,动臂的方案配置类型需要进行编码。具体的编码规则如表1所示。以建立的实例推理算法进行实例推理。比如输出的动臂结构配置方案编码为001001000001001 001001:整体式弯动臂单液压缸、油缸下置、动臂悬挂、动臂包络斗杆、有加强板。
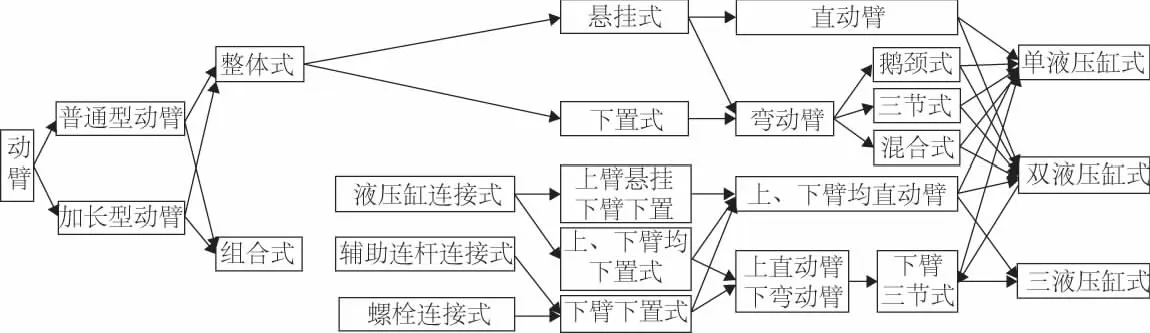
图3 动臂结构类型配置树状图
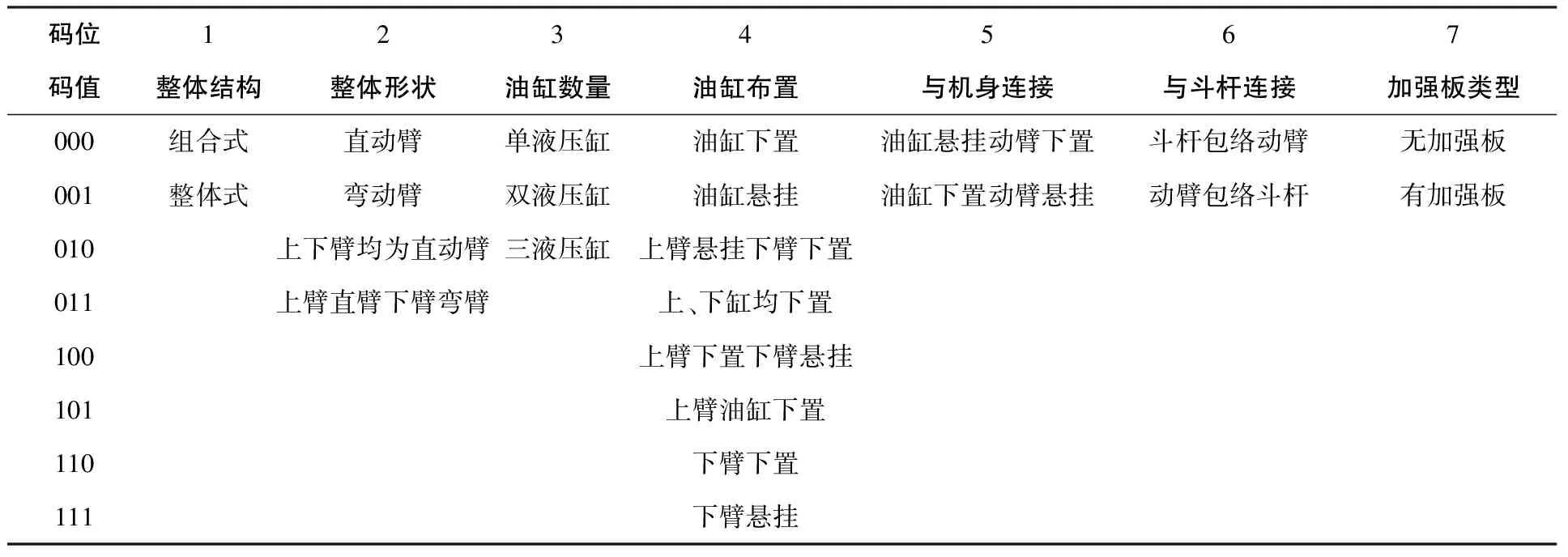
表1 动臂结构配置方案编码规则
实例推理中编码规则决定检索的精度和推理速度[13]。以斗容、挖掘机范围(最大挖掘深度、最大挖掘半径、最大卸载高度、最大挖掘高度)、最大挖掘力、使用环境、工作质量8个参数作为初始参数,以动臂的整体结构、形状特征、油缸布置、加强板类型等配置类型作为输出。对于输入的初始参数的量纲不同,在进行编码之前必须标准化处理,从而消除量纲的影响。本文收集国内外挖掘机动臂实例50个,其中部分PNN概率神经网络的训练实例如表2所示。表2中:A代表整体式鹅颈式单液压缸类型;B代表整体式鹅颈式双液压缸类型;C代表组合式双液压缸类型。R为斗容;w1为最大挖掘深度;w2为最大挖掘半径;w3为最大挖掘高度;w4为最大卸载高度;m为工作质量;i为使用环境;F为挖掘力。
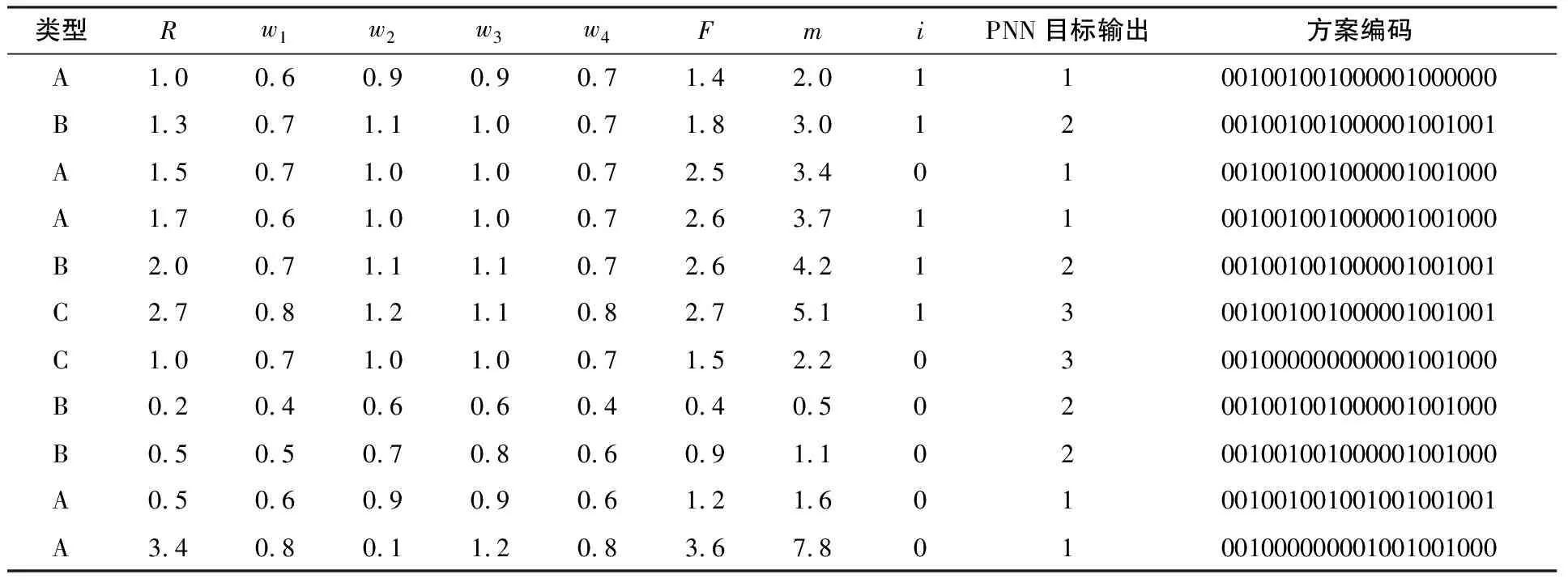
表2 概率神经网络训练部分实例
3 实例推理模型的建立
3.1 PNN概率神经网络
神经网络由于具有非常强的非线性映射能力被广泛应用于CBR、预测和模式识别等领域[14]。本文采用贝叶斯决策规则对实例进行分类,贝叶斯规则在多维输入空间分离决策有广泛的应用,其是PNN概率神经网络的核心。理论上早已证明 , 具有无限隐层节点,且节点传输函数绝对可积的3层前馈网络, 可以实现任何非线性映射[15]。本文采用的概率神经网络结构,包括输入层、模式层、求和层和决策层。具体结构如图4所示。
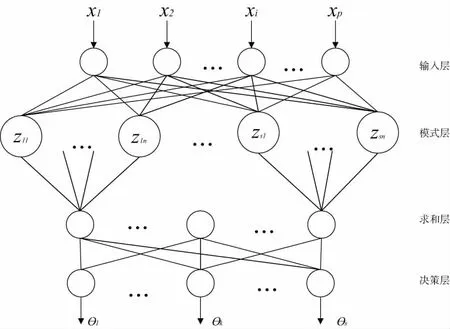
图4 3层概率神经网络的结构
PNN神经网络的一般构成为:设X为测试向量,x=(x1,x2,x3,…,xn), 其中各个元素X表示特征属性值用来对实例进行分类。Wi为类型Ci中的训练样本数。PNN神经网络训练的一般过程为: 首先将测试向量X通过输入层传输到各个模式单元。测试向量与训练向量之间的匹配关系由模式层通过算法计算获得,其计算方式如式(1)所示。
(1)
3.2 最近邻距离法
最近邻算法是从实例库中推理出和目标实例“距离”最近的实例,运用最近邻方法首先要定义“距离函数”,可以根据不同的问题和需求选择不同的距离函数。现在距离函数主要有:绝对值距离法、曼哈顿度量法、欧式度量法和无限模法[16]。当目标实例属性与实例库中相应的属性相同时,则相似度取1,否则取0。对于确定的数值的相似度,本文采用的函数形式如式(2)所示。
(2)
1) 基于专家经验赋权。请设计专家对选择的设计专家对属性参数进行评分,表示为vi。依据评分来确定专家权重W(1)。其计算过程采用公式为:
(3)
2) 基于相似度偏差的客观赋权。设cq为目标实例,C={c1,c2,c3,…cn}是实例库中的实例集合。sij表示为cq与实例ci的相似度,由此可以得到目标实例cq与C的相似矩阵:
(4)
根据客观数据来决定客观权重,相似度矩阵之间的差异可判断属性对检索结果的影响力。针对第j个属性,若实例cq和实例C中所有实例的相似度sij差异很小,则该属性对实例检索的影响力比较小,应该赋予较小的权重;反之,则应该赋予较大的权重。根据以上分析,加权向量W的选择应使所有属性对所有实例的总离差最大。为此,构造目标函数为:
(5)
运用拉格朗日乘法来解此条件极值问题,得到:
(6)

4 实例验证
依托已搭建的挖掘机工作装置实验平台,将收集到的历史实例保存到实例库中,并依据动臂的初始参数:斗容、挖掘机范围(最大挖掘深度、最大挖掘半径、最大卸载高度、最大挖掘高度)、最大挖掘力、使用环境、工作质量、机构参数(lCD、lCB、lCF、lDF、lBF)13个参数作为输入参数。以动臂配置方案的21位编码作为输出,按2.2节的编码规则对非数值的特征进行实数编码。
4.1 PNN训练与分类
设计要求一般根据动臂的整体结构类型分为整体式和组合式等特点将其分为3个大类:整体鹅颈式单液压缸、整体鹅颈式双液压缸和组合式双液压缸。由此建立概率神经网络对3种类型的实例属性特点进行记忆。
本文以设计斗容1.6m3、工作质量30 000kg、最大挖掘力200kN、最大挖掘半径为10 000mm、最大卸载高度8 000mm最大挖掘高度10 000mm、最大挖掘深度6 000mm、使用环境为石方挖掘为初始方案设计参数,将设计参数输入到训练好的概率网络中进行第1次实例推理,得到的结果如表3所示。

表3 新设计要求及分类结果
4.2 最近邻相似度检索
根据概率网络案例推理的结果可以看出,新的设计要求属于B类型,由此要在B类型内进行相似实例的检索。表4为B型实例库和设计要求。根据相似度矩阵的理论,可以得到相似矩阵。
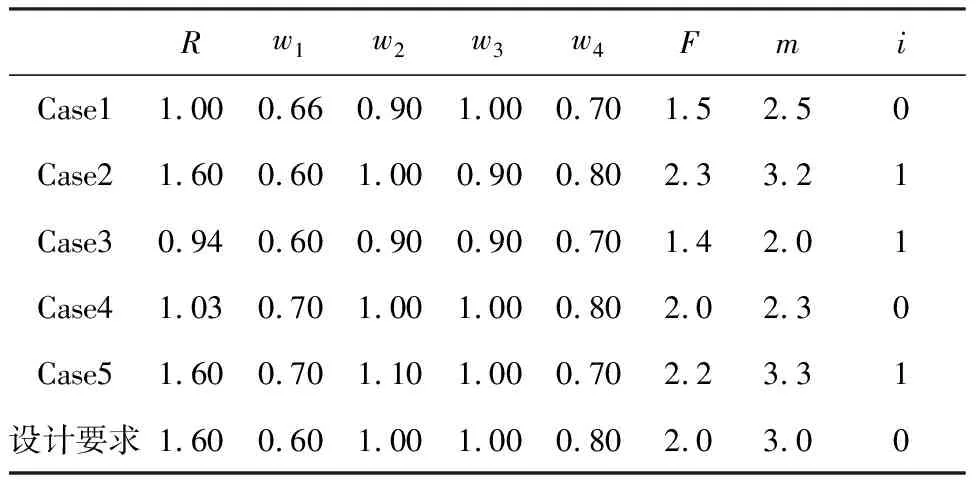
表4 目标实例与概率网络推理出的实例“距离”
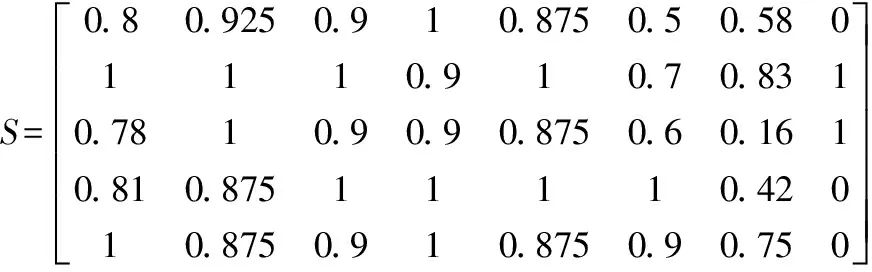
根据式(3)计算主观权重W(1)={0.36,0.04,0.04,0.04,0.04,0.16,0.16,0.16},根据式(6)和相似矩阵S计算客观权重W(2)={ 0.080 4 ,0.047 1,0.037 7,0.037 7,0.047 1,0.163 3,0.209 8, 0.376 9};取δ=0.5,则综合权重W={ 0.220 2,0.043 6,0.038 8,0.038 8,0.043 6,0.161 7,0.184 9,0.268 4}。根据各个属性的加权和求和目标实例与实例库中的实例的相似度sim(cq,ci)={0.516 4,0.916 2,0.718 4,0.577 0, 0.654 4}。由此选取B类型中的case2作为最相似实例,此得到动臂结构配置方案为Case2的动臂结构类型001001001001001001001,解码为整体式、弯动臂、双液压缸、油缸下置、动臂包络斗杆、无加强板类型。
5 结语
通过建立基于实例推理的方法实现对动臂结构类型配置方案的设计,得到以下结论:
1) 通过对动臂结构类型的功能以及特征的分解,依据相关性分析选择与动臂结构相关性比较大的设计参数作为初始参数,通过相关性分析提出冗余的实例,为高效的实例推理奠定了基础。依据编码规则建立特征表示模型,包括斗容、挖掘范围、最大挖掘力等13个参数特征,以及输出配置方案的表示,包括整体式、油缸分布等7个配置元素,方便实例推理。
2) 通过概率神经网络1次检索和最近邻距离法2次检索的混合推理方法,解决了实例推理权重的确定受设计人员主观因素的影响的问题。
最后通过3个实例验证,证明方法的可行性与有效性。CBR技术为动臂的结构方案设计提供了建设性的参考,在这个智能设计平台运行过程中,设计人员与系统进行人机交互的对话,解决设计人员经验不足的问题并且提高设计效率。
猜你喜欢
智能制造(2021年4期)2021-11-04
北京航空航天大学学报(2021年9期)2021-11-02
建材发展导向(2021年6期)2021-06-09
科学技术创新(2020年32期)2020-11-05
重型机械(2020年2期)2020-07-24
消费导刊(2020年1期)2020-07-12
建筑机械(2018年11期)2018-11-22
机械制造(2018年3期)2018-07-25
制造技术与机床(2017年5期)2018-01-19
初中生世界·九年级(2017年8期)2017-09-06