基于纵横向加速度的联合控制循迹模型研究
2018-11-05 02:54曹竞玮江涣
机械制造与自动化 2018年5期
曹竞玮,江涣
(中车青岛四方机车车辆股份有限公司,山东 青岛 266111)
0 引言
无人驾驶车辆作为智能交通领域的重要组成部分,其安全可靠性和交通效率等方面都有待深入研究[1-2]。近年来无人驾驶车辆已成为国内外各大汽车企业和研究院所研究的热点问题,无人驾驶车辆的关键技术为线路识别和自主控制。
道路识别和自主控制可以通过建立一个线路适应性高的驾驶员模型来实现,其中预瞄式驾驶员模型充分考虑驾驶员的前视机制,更符合人的驾驶行为且具有很强的鲁棒性,是驾驶员模型研究的重要方向。MACADAM[3]提出的最优预瞄控制模型被广泛采用,李红志等[4]又提出预瞄时间自适应的方法。陈无畏等[5]通过在线获取路径信息确定当前路径和未来路径,并根据预瞄路径的弯曲程度调整智能车的预瞄距离和行驶速度,行驶稳定且路径跟踪精度高。沈峘等[6]针对大曲率道路设计一种基于驾驶员模型的车辆转向控制方法,预瞄点的选择在考虑车辆行驶速度的基础上,还考虑前方道路曲率的影响,建立三者之间简单的函数关系。陈焕明等[7]基于车辆航向角和横向位移对车辆转向运动进行控制,采用遗传算法优化驾驶员模型控制参数,对复杂道路进行跟随。王家恩等[8]提出一种轨迹预测控制的驾驶员方向模型,假定车辆在预瞄时间内具有恒定的横摆角速度或横摆角加速度,假设根据车身状态预测汽车在未来一段时间内的行驶轨迹,进而结合期望路径来决策理想方向盘转角。
驾驶员的行为决策通常分为轨迹决策和速度决策,对于前者的关注较多,目前绝大多数发表成果都集中研究轨迹决策模型。文献[9-11]虽然涉及到速度决策,但是这些内容都是针对自动巡航或者是编队行驶时的纵向车间距控制,均未考虑道路几何特性对车辆驾驶员速度选择行为的影响,因此无法适应复杂的公路或赛道环境。
在借鉴“预瞄-跟随”驾驶员建模理论的基础上,考虑道路几何特性对理想纵向车速的影响,建立考虑道路曲率和道路宽度综合影响的理想纵向车速模型,在大曲率路段考虑前视行为对理想纵向加速度进行修正。在速度控制和方向控制中引入加速度控制策略,并提出任意道路循迹误差计算方法,建立一个跟随任意道路的速度和方向联合控制的驾驶员模型,便捷且高效地实现任意道路的路径跟踪。
1 道路几何特性描述
驾驶员期望跟随预期轨迹,为了统一表达预期轨迹,如图1所示,设定大地坐标系xoy,用车道中心线的大地坐标来表示期望轨迹,考虑到驾驶员的驾驶特性,车辆在保持中心线过程中易收到前方道路方向变化和道路宽度的影响,在此增加道路曲率和道路宽度的影响因素,因此道路几何特性可以用(xi,yi,ρi,di)4个变量来描述,见表1。其中(xi,yi)表示道路中心线位置的大地坐标,(ρi,di)表示考虑驾驶员驾驶特性的道路信息,i=1表示道路的起点,i=n表示道路的终点。上述道路几何特性都是影响车辆循迹效果的关键道路特性,且根据以上道路几何特性选取合适的车辆控制方案,可以很好地跟随期望轨迹。
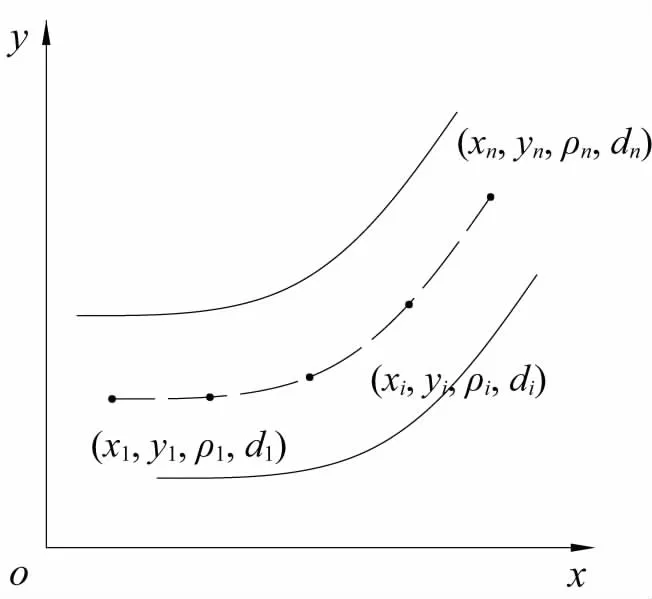
图1 道路几何特性描述
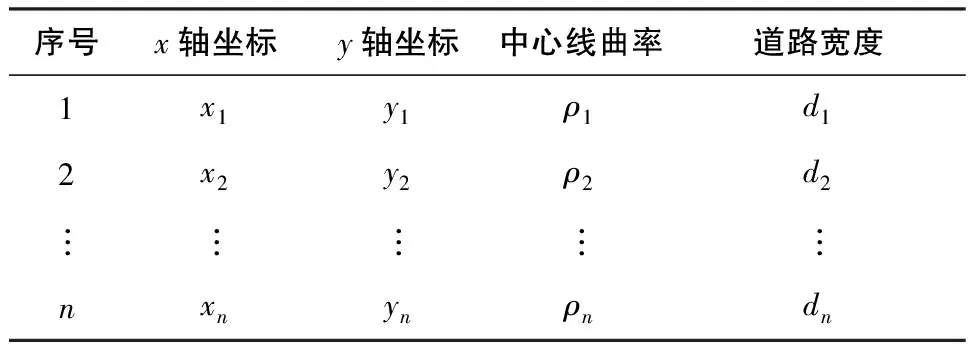
表1 描述考虑车辆循迹的道路几何特性的数表
2 道路几何特性对理想纵向车速影响模型
2.1 道路曲率对理想纵向车速的影响
在研究车辆理想纵向车速模型中涉及到坐标系变换问题,在此作以下规定,如图2所示,在大地坐标系xoy下,定义车辆相对坐标系xoy的原点o固结于车辆质心处,规定车辆x轴方向为车辆纵向方向,其中车辆纵向速度为vx,y轴方向为车辆横向方向,其中车辆横向速度为vy,车辆的绝对速度为V,车辆横摆速度为r,定义车辆在大地坐标系下的航向角ψ为车辆质心侧偏角β和姿态角θ之和。
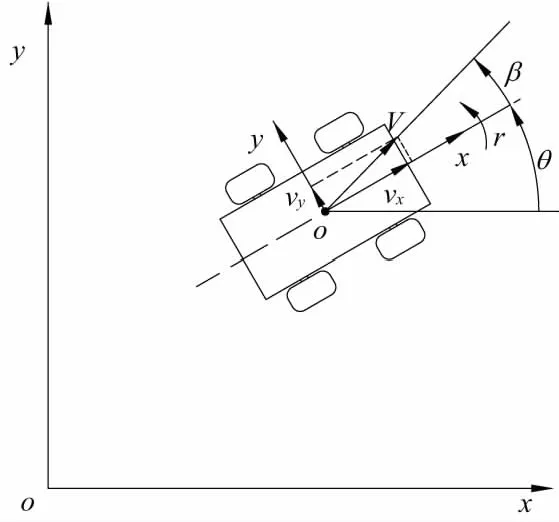
图2 车辆相对坐标系定义
驾驶员在预瞄前方道路过程中完成线路循迹,其依据的道路几何特性是道路曲率,且根据道路曲率的大小调节纵向车速。
借鉴公路线路设计规范中的运行车速测算模型,该模型是根据实测出的车速拟合出的理想运行车速,其具有很好的道路适应性和普遍性。由于文中选取的是一般道路,直线段的速度可取vx=70km/h,曲线段的速度也相应乘以一个系数,以保证车辆纵向速度的连续性,则基于道路曲率设计的理想纵向车速为:
(1)
2.2 道路宽度对理想纵向车速的影响
行车试验结果表明,车道宽度与驾驶员的速度选择有关。行车道越宽,驾驶员倾向于适当提高过弯速度,所允许的车辆距离中心线的位置偏差可以适当增大。考虑到大曲率路段驾驶员的舒适性,可适当增加道路宽度来减缓驾驶员的视觉紧张[12]。
目前车道宽度d常用范围为3.0m~3.75m ,但部分山岭区四级公路最窄车道仅为2.4m,平原区二级公路的车道宽可达到4.4m,在此可设定d∈[2.4,4.4]。以3.5m作为车道的标准宽度,引入驾驶员速度选择行为,其可用车道宽度影响系数λw进行修正,见式(2)、式(3)。
(2)
vxd=λw×vc35
(3)
式中vc35是d=3.5m时的过弯理想纵向车速。
2.3 道路曲率和道路宽度对理想纵向车速的综合影响
综合考虑道路曲率和道路宽度对理想纵向车速的影响,可以近似认为考虑道路曲率影响的理想纵向车速等于车道宽度为3.5m时的过弯理想纵向速度,即:
vx(ρ)=vc35
(4)
将式(4)代入式(3),得:
vxd=λw×vx(ρ)
(5)
将式(5)展开得:
(6)
式(6)表示道路几何特性决定的理想纵向车速,即为含有道路曲率和道路宽度两个变量的分段函数,车辆理想纵向车速关系如图3所示。
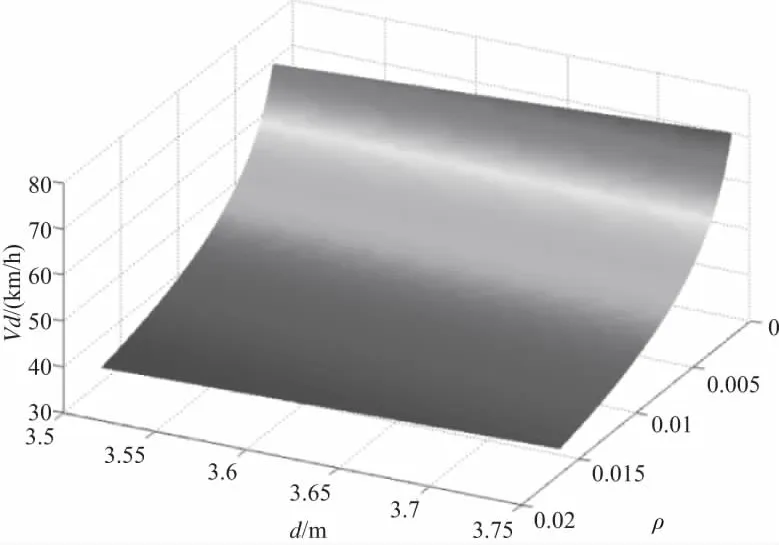
图3 车辆理想纵向车速关系图
2.4 驾驶员行为对车辆理想纵向车速的修正
车辆循迹是靠驾驶员的感知行为来完成的,即对未来的预判和对当前情况的修正。驾驶员的前视行为表示对未来的预判,在不同车速工况下,驾驶员的前视距离相差较大。通常情况下,在高速行驶下驾驶员较倾向于较远的前视距离,从而为可能遇到的突发状况争取更多的操纵时间,而当低速行驶时,往往是大曲率线段以及道路工况多变等因素的影响,需要采取较低的纵向车速进行循迹,其相应的前视距离也较短[13]。由于驾驶员前视距离与纵向车速成正相关,两者比值即表示前视时间T,为了获得较好的线路循迹效果,选取T=0.8作为驾驶员固定的前视时间,因此驾驶员在前视过程下的期望纵向加速度为:
(7)
式中,vpd为车辆在预瞄时间T后所在位置的目标纵向车速,vd为车辆当前位置的理想纵向车速,apd为计算所得当前位置的期望纵向加速度。
除了前方道路条件对驾驶员决策产生影响外,车辆当前的路况也会影响驾驶员对目标纵向车速的决策。当仅考虑预瞄点的目标纵向车速时,车辆的实际纵向速度会大于当前路段的目标纵向速度值。由于车辆行驶在弯道中时,驾驶员往往根据车辆的侧向力和侧倾角的限制来确定理想纵向车速,较大超过目标纵向车速可能会导致车辆发生侧倾现象,因此要对车辆进出弯道以及在弯道中的行驶速度进行控制。
在道路几何特性决定的理想纵向车速模型中,令该模型中当前位置点车辆的理想纵向加速度为acd,当车辆即将驶入弯道时,在当前位置采取预瞄点处的纵向加速度apd行驶,能够有效地降低进入弯道的行驶速度,而当在驾驶员即将驶离弯道时,应以车辆当前点的纵向加速度行驶,只有在彻底驶离弯道才能进行较大速度行驶。而在其他工况则可以简化速度决策,即采取预瞄点处的纵向加速度apd行驶,其控制策略见式(8)。
(8)
将式(8)纵向加速度ad代入速度积分式(9),得到修正后的理想纵向车速:
(9)
3 基于横向加速度反馈的循迹模型
以车辆纵向前进方向建立车辆相对坐标系,在此基础上观测前方道路工况,从而对车辆进行操纵以实现路径跟随。
驾驶员根据预瞄前视过程找出预瞄点的位置,然后依据车辆行驶方程求出车辆理想的横向加速度、横向速度以及横向位移。根据线性区内汽车的横向加速度对方向盘转角的增益Gay,其中Gay见式(10),以此求出理想方向盘转角,然后经过驾驶员的神经反应滞后和动作反应滞后得到最终的车辆方向盘转角输入:
(10)
式中,L为汽车的轴距;Is为方向盘转角到车轮转角的转向系角传动比;K为汽车的稳定性因数;vx为车辆纵向速度。
预瞄点搜索算法采用文献[14]中的方法,在车辆相对坐标系下搜索预瞄点的位置信息。车辆预瞄点处的横向偏差Δfp可以通过点m和点m+1在车辆坐标系下的线性插值求得。
根据“预瞄-跟随”驾驶员建模理论,对横向偏差的补偿方面,考虑在当前时刻以理想加速度作横向匀加速运动,并且经过预瞄时间T后车辆达到期望轨迹。由于驾驶员反应滞后、车辆非线性以及道路复杂工况的影响,采用横向加速度误差反馈的方式对驾驶员模型决策处的方向盘转角进行修正,修正量为:
(11)
从驾驶员特性以及道路条件等方面考虑,提出基于横向加速度反馈的驾驶员模型,如图4所示,其中方向盘转角的期望值δd见式(12)。
δd=δSW0+ΔδSW
(12)
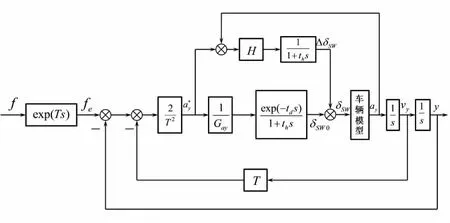
图4 基于横向加速度反馈的方向控制驾驶员模型
4 纵横向加速度联合控制的循迹模型
4.1 纵横向加速度联合控制驾驶员模型
将上述关于道路几何特性的纵向控制和基于横向加速度反馈的方向控制结合,如图5所示,即可以对任意路径进行循迹。该驾驶员模型中纵向控制和方向控制存在着耦合,车速对车辆横向动力学特性的影响主要体现为车速横向加速度增益Gay是车速的函数。
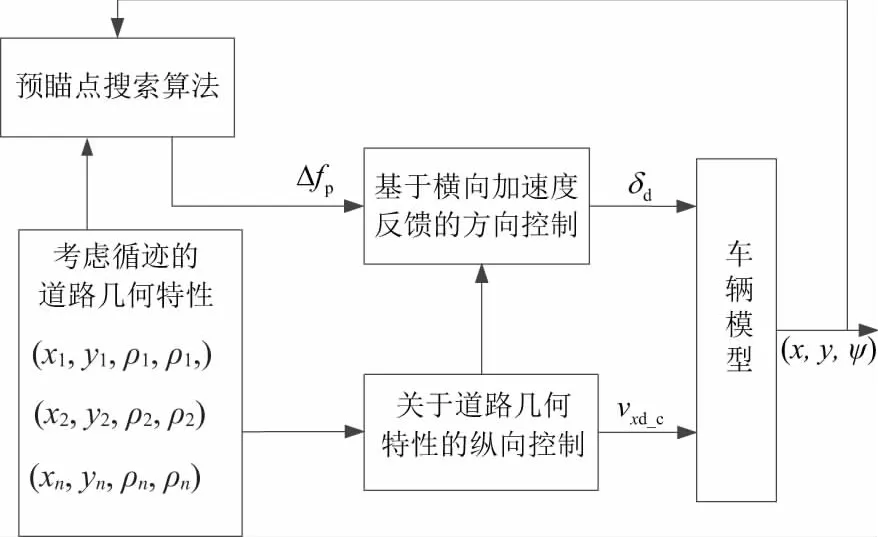
图5 纵横向联合控制驾驶员模型
4.2 车辆模型
为了验证循迹控制算法,采用考虑横向运动和横摆运动的二自由度车辆模型[15],其表达成状态方程的形式见式(13)。
(13)
5 循迹误差计算方法
循迹误差是评价车辆循迹效果的重要指标,而横向循迹误差是循迹误差中主要考虑的误差之一,不同的循迹控制方法通常采用车辆不同位置处的横向循迹偏差,这里规定车辆横向循迹偏差为车辆质心处的横向循迹偏差Δecg。
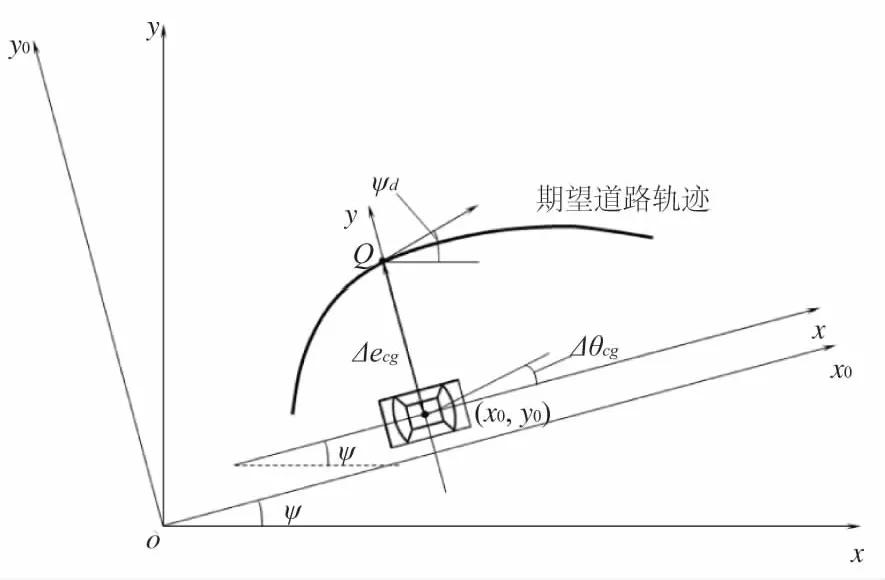
图6 车辆质心循迹误差与期望轨迹的关系
如图6所示,在道路几何特性描述中,将期望道路轨迹离散成有序的点,每个离散点都有其对应的表征车辆循迹效果的道路几何特性参数。假设车辆质心在大地坐标系下的即时坐标为(x0(j),y0(j)),j表示该时刻的时间序号,车辆的横向循迹误差是在车辆相对坐标系下的质心到预期轨迹的横向距离,为了方便计算车辆即时的横向循迹误差,假设大地坐标系旋转角度ψ后得到的坐标系为车辆循迹误差坐标系x0Oy0,其中ψ表示大地坐标系下车辆的航向角,(x0(i),y0(i))表示预期的道路轨迹在车辆循迹误差坐标系下的坐标,此刻车辆横向循迹误差所对应的预期轨迹上点的编号为i,该点称为车辆循迹误差点,用点Q表示,并假设车辆质心在车辆循迹误差坐标系下的坐标为(xcg,ycg)。
根据车辆质心横坐标值确定车辆循迹误差点Q在点m和点m+1之间,车辆的横向循迹偏差可以通过线性插值得到,见式(14)。
(14)
6 仿真算例
本文所选用的某条线路如图7所示,道路宽度为3.5m,该条线路曲率随大地坐标系变化如图8所示。
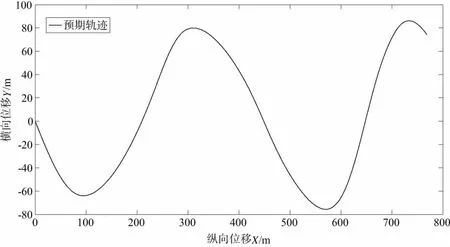
图7 预期线路路径
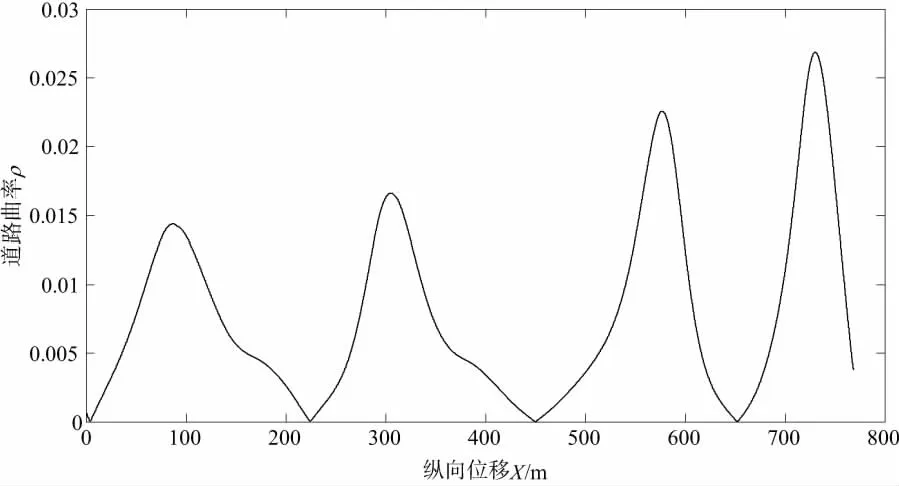
图8 预期道路曲率半径图
为了验证循迹控制算法,选用考虑横向运动和横摆运动的2自由度车辆模型进行仿真分析,根据图2和图3在Matlab/Simulink中搭建仿真模块,该车辆及驾驶员模型的仿真参数见表2。
对上述线路工况进行循迹仿真,图9为车辆线路循迹后得到的横向循迹误差仿真结果。
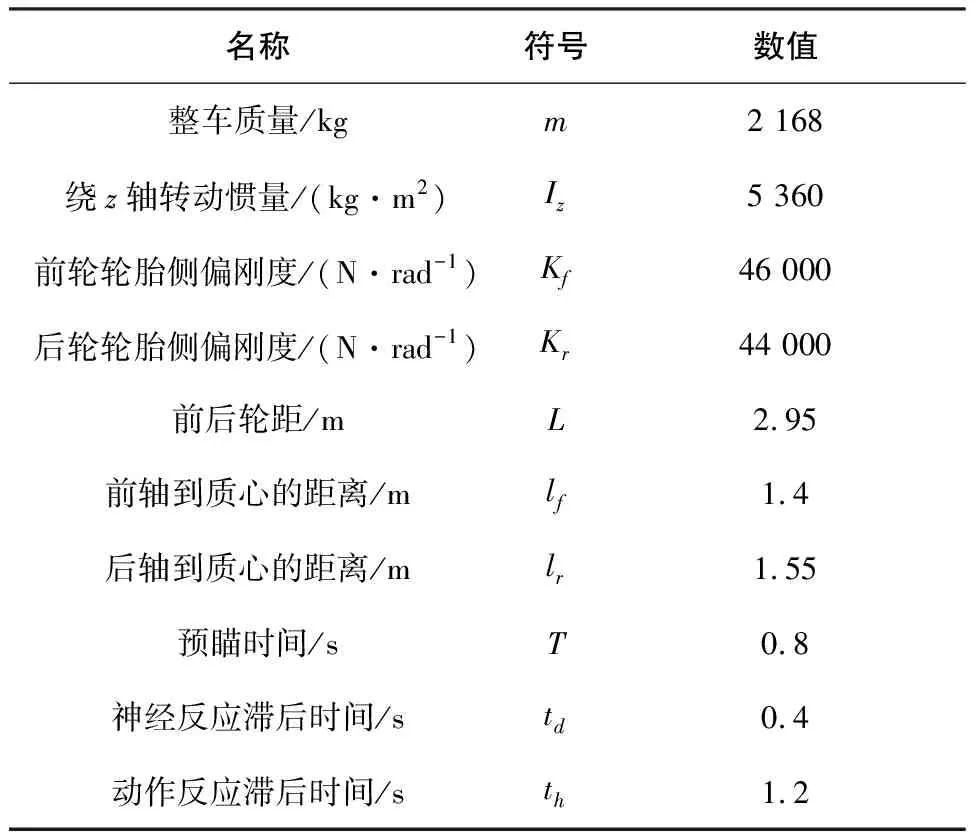
表2 车辆及驾驶员模型仿真参数
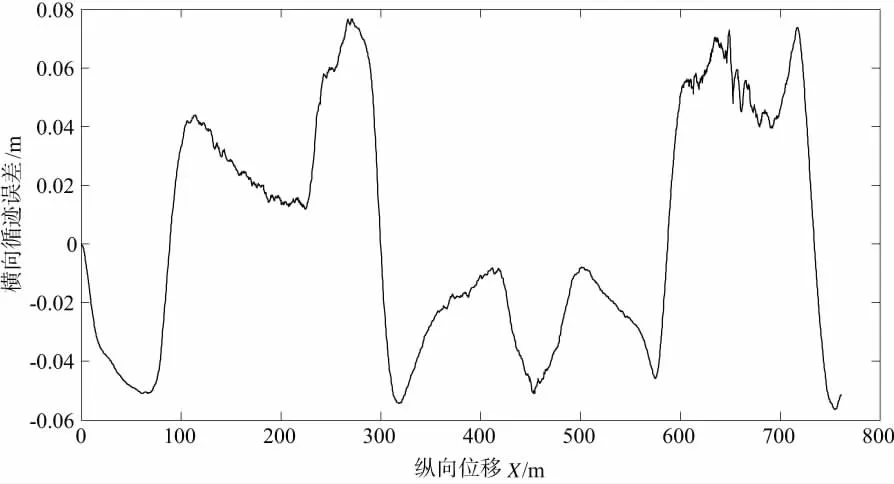
图9 横向循迹误差仿真结果
在本算例中,线路工况相对复杂且部分路段曲率较大,车辆在线路循迹过程中保持平稳且迅速。在此线路工况下,最大的横向循迹误差不超过0.1m,说明该控制算法对线路的跟踪能力较好。后期将开展路径识别和车辆控制系统设计方面的工作,以实现现场实车验证。
7 结语
1) 运用离散数表方式对任意道路进行描述,通过道路曲率和道路宽度计算出理想纵向车速,并在弯道工况下采用预瞄机制对加速度进行修正,在驾驶员建模中将“预瞄-跟随”理论用于任意道路的跟踪控制。
2) 建立基于横向加速度反馈的循迹控制模型,对横向加速度增益失配进行补偿,并结合纵向加速度控制,提出基于纵横向加速度联合控制的驾驶员模型。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
湘潭大学自然科学学报(2022年2期)2022-07-28
数学物理学报(2022年2期)2022-04-26
汽车工程(2021年12期)2021-03-08
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
电子制作(2017年1期)2017-05-17
汽车维护与修理(2015年5期)2015-02-28