0603型绿色贴片LED方向检测算法研究
2018-11-05 02:54拜颖乾张君安刘波
机械制造与自动化 2018年5期
拜颖乾,张君安,刘波
(1. 陕西铁路工程职业技术学院,陕西 渭南 714099; 2. 西安工业大学,陕西 西安 710021)
0 引言
贴片LED全自动编带机是按照规定方向将芯片编入载带的自动化设备[1],编入载带芯片的好坏直接影响着后续贴片机的工作效率。故芯片的方向检测、缺失检测等是判断编带质量的重要指标。芯片的缺失检测可以采用运算量小,计算速度快的明度检测算法。传统的0503型贴片LED等芯片外部轮廓都有明显的特征,即其中1个角与其他3个角相比为缺角,故均可采用算法简单、效率高、准确性好的面积检测方法进行方向检测,但0603型绿色贴片LED外部轮廓没有明显特征,一般的算法无法进行判别。采用一些硬件升级编带机视觉检测系统又给企业增加成本,不利于企业实现效益最大化的需求。所以研究简单快捷、运算速度快、准确度高的算法对0603型贴片LED进行方向检测是非常必要的。因为编带机是一种高速运转的自动化设备,每分钟编入载带的芯片数量可以达到36 000片。这样可以和后续的自动贴片机达到完全啮合的效果,所以编带机的效率也是非常重要的参数之一。故采用CCD摄像机、图像采集卡及摄像机镜头作为硬件,基于VC++6.0集成开发环境作为软件的一套视觉检测系统实现贴片LED的方向检测。此系统简易灵活,通过软件系统的开发就可对各种类型的芯片进行方向检测,可以满足企业的发展需求。本文经过反复试验得出,首先采用MeanShift图像分割法对芯片进行图像分割,然后利用传统的边缘检测算法提取芯片的轮廓特征,最后通过判别芯片内部引脚特征的方法确定芯片的方向。该方法运算量小、检测精度高,用于编带过程中判断0603型绿色贴片LED的方向最为合适,可以保证后续设备对该芯片的进一步处理。
1 MeanShift算法
1.1 MeanShift算法特点
MeanShift算法首先就是计算出当前点的偏移值,然后以该点为基点再计算出偏移均值,如此不断地迭代,直至满足一定条件后计算结束,这就是该算法的核心。
随着数字图像处理技术的不断发展,图像增强和图像分割的相关算法也不断地发展,但处理一些结构特殊的样本时还存在很多局限性。MeanShift图像分割法也得到了发展,新的函数也被定义出来,表征着偏移向量对偏移量的贡献是不同的[2]。
随着对MeanShift算法研究的不断深入,该算法在图像分割处理过程中的优点越来越凸显。任何样本图片经该算法分割之后,内部结构就按照其纹理明显地被分离成块状,再通过边缘检测算子提取其边缘就会得到清晰的轮廓。对一些结构特殊的样本,采用此种算法判断其正反或方向是完全可行的。
1.2 MeanShift算法的原理
假设有一个d维空间Rd,其中有n个样本点xi,i=1,…,n。x点的MeanShift向量形式为:
(1)
Sh为半径是h的高维球区域,k代表n个样本点xi中的某些点,有k个点落在Sh高维球区域。满足高维球关系的y点的集合为:
Sh(x)≡{y:(y-x)T(y-x)≤h2}
(2)
由此可看出,(xi-x)为xi相对于点x的偏移向量,式(1)中的MeanShift向量Mh(x)是由Sh中的k个样本点经于点x的偏移向量求和再平均后得到的。MeanShift算法的定义可以由一个简单的示意图形象的表示,具体如图1所示。
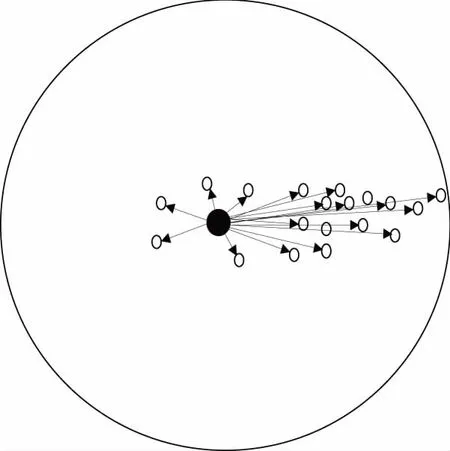
图1 MeanShift算法定义的示意图
由MeanShift算法定义的示意图可以看出,Sh就是大圆高维球区域,小圆就是样本点xi∈Sh,黑点就代表基准点x,箭头就是xi相对于x的偏移向量,明显可以看出,平均偏移向量Mh(x)基本上都指向了样本点多的区域,也就是说Mh(x)大多指向概率密度梯度的方向。
核函数的定义:假设X表示了一个d维欧式空间,x是其中一个点,用列向量表示,x的模为‖x‖2=xTx,R为实数,假设有一函数K:当X→R时,有另一函数k:x[0,]→R,即是:
K(x)=k(‖x‖2)
(3)
而且还满足:
1)k≥0;
2)k非增,即aπb,则k(a)≥k(b);

在MeanShift算法中,经常要用到两个核函数,一个是单位均匀核函数,一个是单位高斯核函数。单位均匀核函数的表达式如式(4)所示。

(4)
单位高斯核函数的表达式如式(5)所示。
N(x)=e-‖x‖2
(5)
这两个核函数的示意图如图2所示。
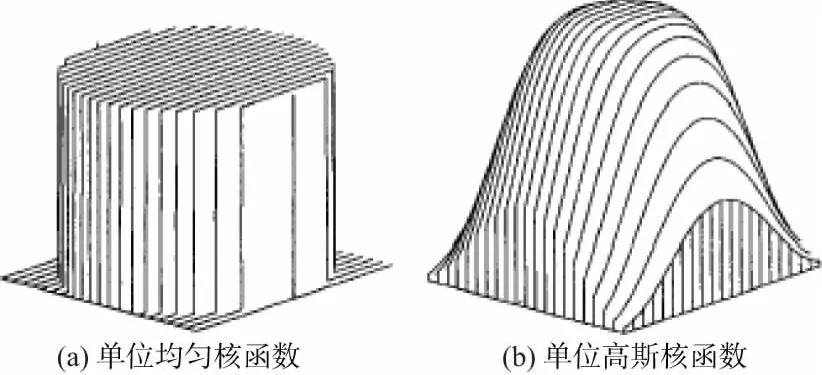
图2 核函数的示意图
由式(1)可以看出,如果样本点都落入高维球区域Sh, 则落入高维球区域的每个样本点对函数Mh(x)的贡献是一样的。但实际情况是每个样本点的贡献大小不可能是一样的,故为每个样本点xi都引入一个权重系数是很有必要的。所以MeanShift算法的另一种表达为:
(6)
其中:GH(xi-x)=|H|-1/2G(H-1/2(xi-x));G(x)为单位核函数;H为对称的d×d矩阵,称为带宽矩阵;w(xi)≥0是对每一个样本点xi引入的权重系数。
2 传统边缘算法方向检测实验结果
0603型绿色贴片LED在现代的贴片式LED里是比较特殊的一种,相比较5050型等其他类型的芯片,该芯片外部轮廓没有明显的特征,所以采用简单、运算量小、应用广泛的面积检测算法去判别该型号贴片LED的方向是行不通的。故尝试通过识别其内外部特征的方法来判别其方向。要通过此方法判别芯片的方向,关键是要获得芯片比较完整清晰的内外部边缘信息。如果提取的边缘信息模糊不清楚,则最后必然无法准确地确定出芯片的方向。传统的边缘检测算法有Krisch边缘检测法、Prewitt边缘检测法、高斯拉普拉斯边缘检测法等。图3所示是分别经过以上3种边缘检测法提取边缘后的结果。由图3(a)-图3(c)可以看出,分别经过以上3种传统边缘检测算法提取边缘后,芯片的内外特征不是很清楚,非常模糊,特别是芯片的内部特征根本无法辨别。故单采用传统的边缘检测算法提取芯片的内外特征无法得到较完整、较清晰的边缘信息。这样就无法通过识别芯片的轮廓特征来判别其方向。

图3 传统边缘检测
3 改进后边缘算法方向检测实验结果
图4是首先利用MeanShift图像分割法对芯片图像进行分割,将芯片图像的内部构造一块一块地割裂开来,然后再分别利用Krisch边缘检测法、Prewitt边缘检测法和高斯拉普拉斯边缘检测法提取芯片的边缘信息的结果。由图4(d)-图4(f)可以看出,0603型绿色贴片LED的边缘信息被较完整清晰地提取出来了。与传统的边缘检测算法提取的边缘信息相比较,经过MeanShift图像分割法分割后,再利用边缘检测法提取的芯片边缘信息要完整清晰很多。

图4 改进后边缘检测
由图4和图3提取边缘信息的结果可以看出,经MeanShift图像分割法处理后,再使用传统的边缘检测算法提取芯片的边缘特征可以很好地将芯片的内外特征分离开来。再对比Krisch、Prewitt、高斯拉普拉斯这3种边缘检测算法提取的边缘信息可以看出来,经过高斯拉普拉斯边缘检测法提取的芯片边缘要更加的完整清晰。故判别0603型绿色贴片LED的方向可以通过MeanShift图像分割法首先对芯片图像进行分割,然后利用高斯拉普拉斯边缘检测法提取边缘信息。得到较完整清晰的边缘信息后,就可利用识别芯片内部特征的方法来确定其方向。
4 结语
利用MeanShift图像分割法对0603型绿色贴片LED图像进行分割后再进行边缘检测解决了传统的边缘检测算法无法完整清晰地提取芯片边缘信息的问题,为通过识别芯片内部特征,即识别芯片内部引脚个数的方法来确定其方向提供了坚实的基础。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
统计与决策(2019年7期)2019-05-05
东西南北(2019年6期)2019-04-30
基础医学与临床(2018年11期)2018-02-13
小康(2017年34期)2017-12-08
通信产业报(2016年44期)2017-03-13
中国房地产业(2016年2期)2016-03-01
转化医学电子杂志(2015年4期)2015-12-27
天津冶金(2014年4期)2014-02-28
雕塑(1999年2期)1999-06-28