边海防立体监视系统组网探测技术研究
2018-10-26 05:51:58卞紫阳
激光与红外 2018年10期
鹿 玮,卞紫阳
(华北光电技术研究所,北京 100015)
1 引 言
边海防是国防的重要组成部分。古今中外,大多数国家都把加强边海防作为安邦定国的战略任务来对待。我国幅员辽阔,陆地边境线长达2.2万公里,由于我国边境沿线地理环境十分复杂,边海防环境错综复杂,有戈壁、丛林、高山、草原等不同地貌,出入境便道数量难以估计,使得我国边境防线的侦察监视任务尤为艰巨。目前存在的问题有:①各个省、市、县单独构建边海防监控网络,存在交接处盲点及责任不清楚的问题;②路口关卡的设备多为单个设备的运行,缺少联动;③各自管辖范围内也存在边海防监控设备种类较为单一,主要依靠的仅为摄像头,出现大量盲区;④值班室需要人工盯防,没有自动报警设备,消耗大量人力。当前边海防周边条件复杂、传统的振动、对射、泄漏、微波、雷达等周界防护手段受限于恶劣的自然天气或复杂应用场景,不能有效发挥效能,因此急需提出更有效的边海防立体监视方案。
本文综合运用大数据、物联网、人工智能等新技术,以目前边防部队的实际需求为出发点,充分考虑边境地区的地形地貌、气候环境特点,解决现有侦察监视装备的遗留问题,补全装备需求空白,构建远距离侦察预警以红外全景热像仪为中心,中距离侦察识别以分布式热像仪为基点,近距离感知以声震磁传感器为辅助的“万物互联、人机交互、天地一体”边海防立体监视安防网络空间。
2 边海防立体监视系统设计及组成
2.1 边海防立体监视系统总体设计
在总体架构设计中,构建多传感器融合组网探测模型进行立体监视。边海防立体监视系统可以分成三层架构:边海防感知层、边海防网络层和边海防应用层。其中,边海防感知层是边海防立体监视系统的数据来源;边海防网络层为感知层提供高速信息传输通道,同时为应用层提供超级计算能力;边海防应用层统筹利用边海防感知层和边海防网络层的全面感知能力和超级计算资源,实时分析处理海量区域情报,针对突发边海防事件快速反应、智能决策、合理处置。
2.2 边海防传感器数据采集层
边海防感知层是边海防立体监视系统的数据来源,由各种传感器和传感器网关构成,是边海防立体监视系统的核心层,主要是信息的智能采集,由声音传感器、震动传感器、磁传感器、红外传感器、压力传感器、可见光相机、红外成像传感器等组成[1]。
以下分析、归纳了边海防传感器数据采集层应用的主要传感器性能矩阵,如表1所示。

表1 主要传感器性能矩阵
2.3 边海防网络信息传输层
边海防立体监视系统主干链路利用已有通信基础设施,如自建光纤,相关无线通信资源,在一些较为复杂,偏远的地区,无任何可用资源的情况下,可以利用自架杆线以及无线传感网络与微波通信系统互相结合的方法对信息传递进行保障。其通信网络结构图如图1所示。
第一部分是有线网络。通过电路或者光纤等方式来实现对各种传感器、传感器网络之间的数据汇聚,并把收集到的信息发送至各级指挥中心(指挥室、管理监控终端)来分析和处理由各级发送的数据,然后根据分析结果触发识别、监视、预警、跟踪等反应行为对事件进行处理。
第二部分是无线宽带网络。在具有供电设施,地形较为开阔或者是制高点等拥有较好自然条件、方便管理的位置,通过建立卫星小站、无线网桥等方式,建设一些高速率的通信网络,这些方式能够作为有线网络的延伸,可以安装传感器在这些节点上,用于回传大信息量数据(如高清甚至超清图像视频等),同时这些传感器也可作为下一级网络的路由节点,将下一级网络发送来的数据回传到有线网络中。
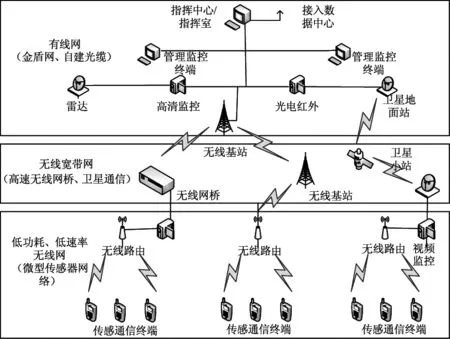
图1 边海防立体监视系统网络结构图Fig.1 Network structure map of border defense stereo monitoring system
第三部分是低速率、低功耗的无线网络。在无供电设施并且地形较复杂的需要监视的区域范围,对各个传感器设备若采用卫星通信的方法会使运行、传输与维护的成本大大提高,而在这种恶劣的环境下可将传感模块和对应的通信模块封装成安全性较好的免维护设备,组建低速率、低功耗无线传感网络,通过光、风或低功耗电池供电,采用多跳路由的方式进行扩展通信使数据传递到上一级网络节点。
2.4 边海防智能应用层
边海防智能应用层主要是针对不同应用传感器网络开发的软件体。应用层中既有网络基本应用,如时间同步、节点定位等,也有高级应用,如情景感知、目标跟踪等。每个应用以及服务都应该通过针对它的特性的网络接口实现对传感器硬件平台的通信以及对基础软件之间的通信,整个网络功能的实现是通过软硬件的协调工作的方式来完成的。
边海防应用层在边海防感知层和边海防网络层的全面感知能力和超级计算资源的支撑下,对传感器网络采集的海量区域情报进行实时分析,对突发边海防事件进报警。
3 基于贝叶斯网络的立体监视系统组网探测技术
3.1 立体监视系统组网探测的问题分析
对上述系统任务需求的广域和高分辨目标监视,关键是要利用各类传感器或传感器系统实现此任务需求的解决方法,分析传感器的性能要求,确定开展工作所需要研究的问题。
分析、研究各类传感器探测目标的过程可分为两个阶段,即目标的搜索捕获阶段和探测识别阶段,其技术解决方法上可将之分解为两个问题:
1)单传感器探测(感知)问题,即传感器本身对目标的探测技术问题,包括对目标的检测、分辨、识别和定位跟踪能力以及环境适应能力等,主要是从提高传感器自身的探测性能和数据处理能力来满足;
2)传感器系统(网络)探测问题,即传感器系统的空域覆盖、时域问题,要求从系统上解决对关心的广阔空域内随时可能出现的瞬间目标时空事件进行及时搜寻和捕获,包括空域的广阔纵深无缝覆盖能力和时域长期持续监视能力,从而保证对广域地区随时出现的瞬间目标及时捕获跟踪识别。
3.2 单传感器探测(感知)模型
解决上述第一个问题及传感器探测技术,如众所周知的雷达技术、微光夜视技术、热成像技术、激光技术等。对于边防传感器系统来说,所有这些探测技术的传感器,其单传感器(传感器节点)均有一定的探测空域(或称感知空域)和范围,通常称之为传感器节点的探测模型或称感知模型。根据实际中对传感器感知区域的多样化需求和传感器的种类不同进行归纳,有以下三种基本的传感器节点感知模型:
1)全向感知模型。例如,单节点的声、震、磁等传感器节点,它们对环境的感知能力是全方位的,节点的感知范围是一个以节点为圆心、以其感知距离(由节点硬件特性决定)为半径的圆形区域。
2)定向感知模型。例如,光电、红外、雷达等多数传感器的探测区域是具有方向性的扇形区域,它对环境的感知受“视角”的限制。其节点的感知范围是一个以节点为圆心、以其感知距离为半径且与其指向、视角相关的扇形区域。
3)线型感知模型。例如,监控传感器系统中的压力、振动感敏线缆和光纤等传感器,其感知区域是沿着很长线缆或光纤的狭窄线形区域。
在进行传感器系统设计分析时,还要根据传感器节点在其探测区域内对目标的感知能力特征,将其节点感知模型分为以下两类传感器感知模型:
1)布尔感知模型。这是一个简单、理想化的二元感知模型,节点的感知范围是一个以节点为圆心、以其感知距离为半径(由节点硬件特性决定)的圆形、扇形区域。只有落在该圆形、扇形区域内的点才能被该节点覆盖,目标被感知的概率均取值为“1”,否则为“0”。
2)概率感知模型。对通常的如光电、雷达这样的传感器而言,不是上述的理想化二元感知模型,而是在节点的圆形感知范围内,目标被感知到的概率是由传感器探测性能即目标到节点的距离、节点物理特性等诸多因素决定的变量(0~1),不是个常量。离节点的距离越远,目标被感知的概率就越小。因此为可靠保证对广阔地域目标的搜寻、捕获,要求无缝、无盲区且有多层重叠的覆盖。
另外,从传感器节点对目标的感知过程是从低级的目标探测(从背景噪声中发现目标存在)、识别(认清和分类目标)到高级的目标确认(识別目标类型并被描述)的逐步深人过程,其传感器感知模型中的感知距离是不同的,随着感知等级提升与深人,感知距离会逐步减少,即一般探测距离>识别距离>确认距离,由此也要求有多层重叠覆盖。
3.3 多传感器融合组网探测的贝叶斯网络模型
上述第二个问题是实际监控应用时要求的感知区域远远大于上述单个传感器节点探测的广域空域而提出的属于传感器系统(网络)问题,是获取目标信息的前提和至关重要的任务,是极为困难的目标搜寻问题,要求解决可靠搜寻并捕捉到在广域地区随时可能出现的瞬间即逝的目标及其时空事件,即要求解决广域的空域覆盖能力和时域持续监视能力这两个问题。为描述传感器系统的目标搜寻与捕获能力,通常采用所谓“搜寻模型”[2]来进行估计,例如,目前在军事应用中常用的NVESD(美军夜视与电子传感器管理局)搜寻模型,用来预测在搜寻视场中运用光电探测器搜寻并捕获目标的大体概率。其实质是对搜寻/捕获的总体能力或概率分析,它由传感器能否覆盖目标可能出现的空域和时域,能否捕捉到目标出现的时刻以及发现目标的观察时间几者的联合概率决定[3],即:
P0=P1×P2×Pt
式中,P0表征传感器系统可靠搜寻并捕获到目标的概率;P1表征传感器系统的空域覆盖能力,为空域上传感器搜索视场覆盖目标的概率;P2表征传感器系统的时域持续监视能力,为时域上覆盖目标可能出现时间的概率;Pt表征传感器对目标捕获的概率,决定于传感器本身的探测能力。
空域覆盖能力:为可靠保证搜寻并捕获到目标,要求从空域连续覆盖目标可能出现的范围,传感器的覆盖范围不小于目标可能出现的空域时,则上述P1等于1。
时域持续监视能力:要搜寻到目标的另一重要要求是时间上的持续监视能力,或称“持续性”(Persistence)。因上述目标时空事件是随时可能出现的瞬间即逝现象,为保证传感器开机 观测的窗口时间能捕捉到可能的目标出现或目标时空事件发生,要求传感器系统持续观察目标的时间大于目标随时可能出现的时间(此时上述P2=1),同时保证观察者发现目标的观测时间。
传感器的探测性能:Pt是一个与传感器扫描通过目标的时间(观测时间)和传感器响应速率有关的发现目标概率,决定于传感器视场及传感器响应速率。
总结上述各类平台光电、雷达等传感器系统对高价值目标的搜索与捕获的方法,可以概括为:
1)从空域和地域要求传感器系统能无缝地并有部分重叠覆盖目标可能出现的地域和空域;
2)时域上的持续监视,要求能有效捕获到随时可能出现的、时间短暂的目标时空事件,并对目标出现过程自始至终地跟踪。
4 边海防立体监视联动探测方案
在总体架构设计中,构建多传感器融合组网探测模型进行立体监视。其中,多传感器融合包括两种,第一种是多模态传感器的联动使用,比如超近程声震磁传感器起到唤醒作用,近程分布式红外热像仪起到二次确认的作用。第二种是同模态传感器的联动使用,比如在两个分布式红外热像仪的重叠区域内进行联合探测,不仅可以降低虚警率,提高探测率,还能通过三角测量法定位目标的具体位置,实现精准探测。
根据作战需求将侦察监视装备分为远距离侦察预警、中距离侦察识别以及近距离感知三部分,如表2所示。

表2 侦察监视装备分类表
边海防立体监视联动探测硬件系统由红外/可见光/声震/磁等多传感器网络、传感器融合网关、供电分系统、传输网络、信号处理服务器、后端显控设备等分系统组成。图2是边海防立体监视联动探测硬件方案设计的示意图。

图2 边海防立体监视联动探测硬件方案设计Fig.2 Design of hardware scheme for border defense stereo monitoring and detection
边海防立体监视联动探测硬件系统的核心部件为远距离搜跟一体光电昼夜侦察系统,如图3所示。其由可见光摄像机、红外热成像夜视仪组成,同时具有目标告警、跟踪与定位,全景拼图的搜索与跟踪一体的功能,能在全方位360°连续巡扫侦察监视模式和跟踪详查模式之间进行切换。远距离搜跟一体光电昼夜侦察系统对直立单兵,可见光识别距离大于等于9 km,红外识别距离大于等于4 km。
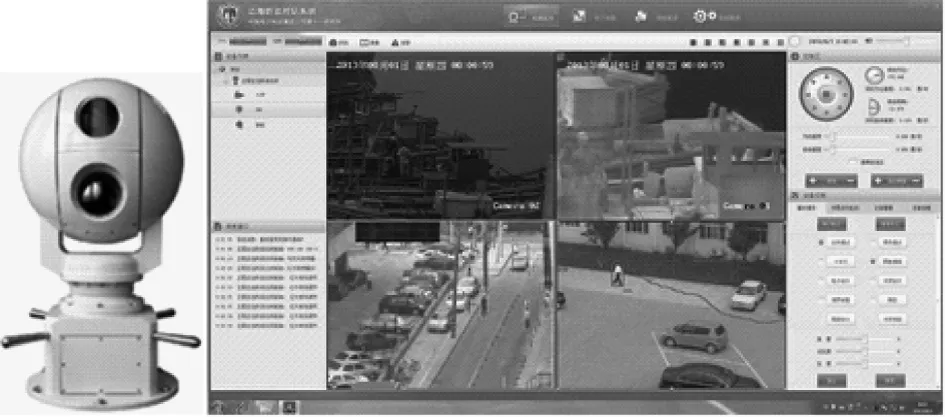
图3 远距离搜跟一体光电昼夜侦察系统Fig.3 Long distance search and heel integrated photoelectric day and night reconnaissance system
红外全向预警系统如图4所示,主要配备多路红外传感器和转台,具备全天时、360°全向目标探测,并可对目标的行为进行分析,如逆行、奔跑、聚集等。系统还可以智能地区分目标类型:人或车辆,并在电子地图上标示出目标位置及情报上传。前端光电探测设备主要包括4支红外热像仪、水平转动转台,主要负责采集红外图像。红外全向预警系统对直立单兵红外识别距离≥500 m。
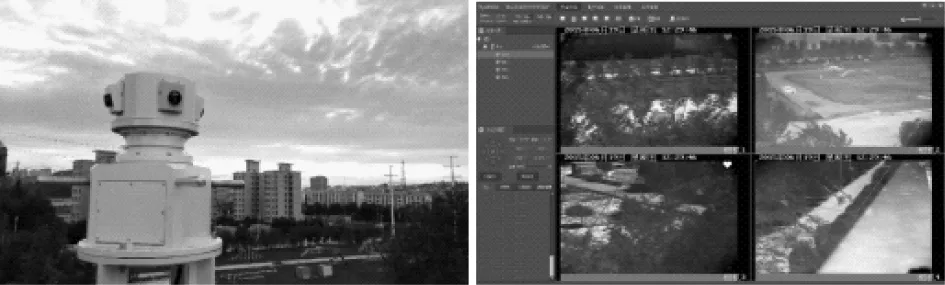
图4 中程分布式红外全向预警系统Fig.4 Mid range distributed infrared omnidirectional early warning system
全系统由两个网络构成:一是监控与处置设备以太网(简称“设备网”),二是计算机信息系统以太网(简称“信息网”),如图5所示。两个网络由防火墙隔离,用于阻止一般情况下的网络攻击,防止敌对恐怖分子通过远端的设备接口入侵内部的计算机信息系统。在设备网中所有非网络设备都通过相应的主机或网络转换器接入网络。在信息网中的中心服务器具有双网卡,一个网卡用于连接信息网,另一个网卡用于连接原有网络,这样一来当不同被监控区域组网建立上级中心时,本系统的设备网和信息网中的所有设备都无需更改配置,原有网络和本系统信息网中的其他计算机还可用于辅助监控[4]。
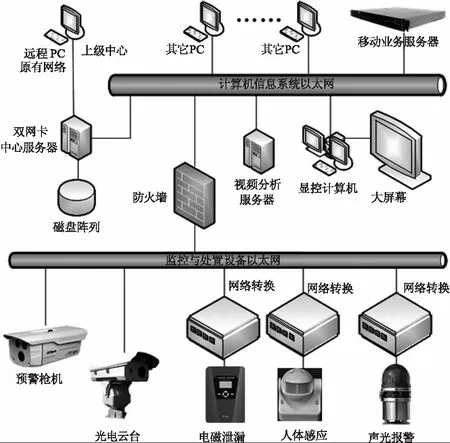
图5 显控分系统物理架构Fig.5 The physical architecture of the display and control subsystem
后端显控系统对前端光电、可见光、声音、震动、电磁等传感器传回到后端的报警信号,根据贝叶斯网络组网探测模型中各个传感器的概率感知模型[5-6],在后端显控系统中计算出融合探测的结果。实验表明,基于多传感器组网探测的边海防立体监视系统的探测准确率比单红外传感器的探测预警率有所提升,误报率显著下降,具体实验结果如表3所示。
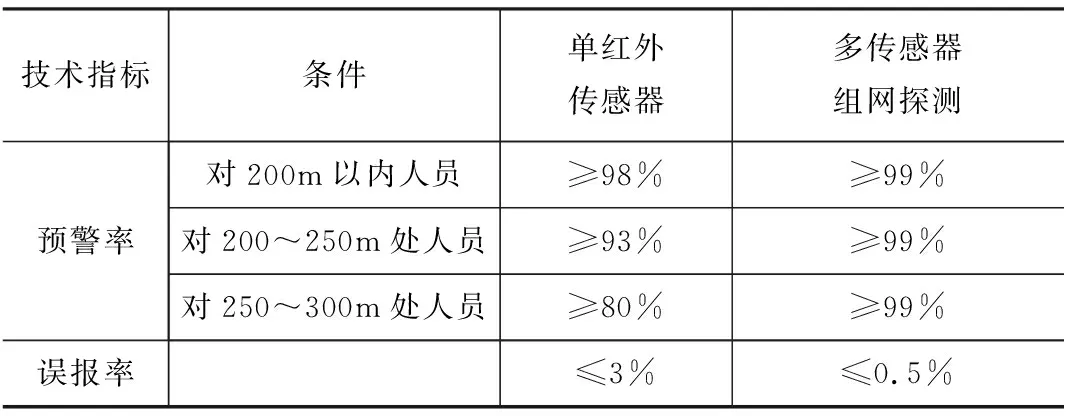
表3 多传感器组网探测与单红外传感器探测准确率比较表
5 结 论
边海防环境复杂,对低虚警率、高探测率的无人值守立体监视系统需求强烈。本文建立了多传感器组网探测的数学模型,实现了基于贝叶斯网络的边海防立体监视联动探测方案,具有高探测率、低虚警率的优点,在边海防应用领域具有重大的意义。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16 06:05:22
小哥白尼(趣味科学)(2020年3期)2020-07-27 01:44:42
趣味(数学)(2020年12期)2020-06-09 05:39:18
电子测试(2018年14期)2018-09-26 06:04:28
军营文化天地(2018年2期)2018-04-20 07:08:03
创新作文(小学版)(2016年10期)2016-11-11 05:45:17
西南交通大学学报(2016年4期)2016-06-15 20:29:36
海峡科技与产业(2016年3期)2016-05-17 04:32:11
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:14
汽车零部件(2015年8期)2015-06-23 13:53:51