
一种基于无源射频识别的智能门禁系统
2018-10-25 08:21:40
机械与电子 2018年10期
(首都医科大学附属北京世纪坛医院,北京 100038)
0 引言
目前,安全门禁系统经常使用的识别人员权限并控制其访问的技术,是无源射频识别(RFID)技术。但是,采用这种技术的门禁系统较难阻止未经授权的人员将授权人员限制在禁区内[1-2]。实时定位系统(RTLS)可以在室内区域实时识别、定位和追踪人员,已被广泛用于安全防范系统[3]。然而,常规的超高频(UHF)基于RFID的RTLS在室内环境中,会遭受多路径入侵和干扰。此外,无源射频识别系统在实际中常因带宽受限导致识别和定位性能的严重恶化。为了提高识别的可靠性和定位精度,减少多路径效应的影响是一个关键问题[4-6]。解决这一问题的方法之一是专门研究天线设计,使其辐射模式极窄,以尽量减少不必要的读数。文献[7]采用天线分集技术降低多径入侵的副作用。文献[8]提出使用天线波束扫描来克服多径反射对定位精度的影响的设计思路。文献[9]将计算机视觉(CV)系统与RFID系统结合起来,以克服有限带宽和固有多径信道特性的限制。由于计算机视觉技术的飞快进步,提高了视觉识别的可靠性和定位精度,并且能够以低成本提供可靠的物体、人员跟踪[10],所以可将其用于门禁系统中。
综上,提出了一种混合超高频RFID和计算机视觉系统,用于识别、定位和跟踪检测区域的RFID标签。
1 系统设计
1.1 系统架构
为了满足安全访问控制的要求,提出了一种基于RFID和计算机视觉(CV)的混合系统架构,如图1所示。
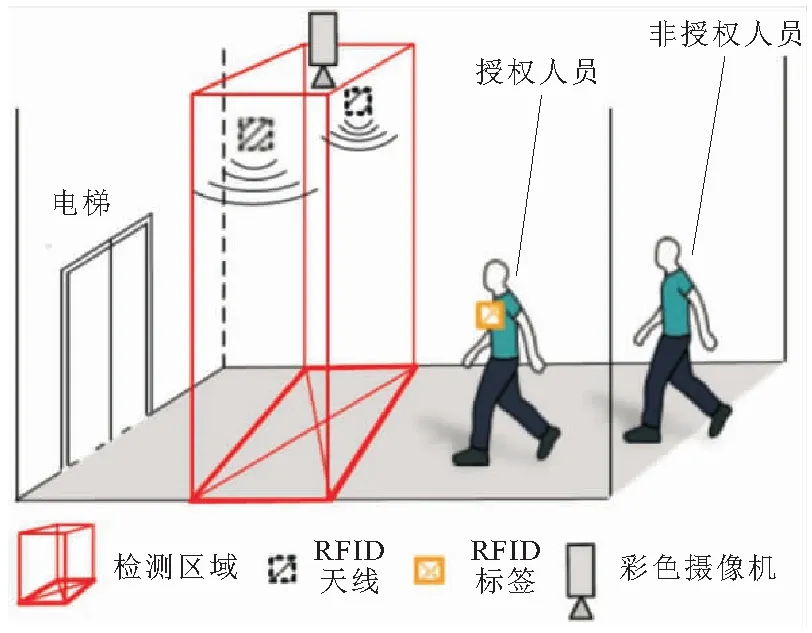
图1 系统架构
访问控制系统在门的前面设置有一个检测区域。RFID子系统包括具有2个天线和多个半静态标签的UHF RFID读取器。天线安装在检测区域上方靠近天花板的两侧。授权人员佩戴嵌有半透明标签的徽章。计算机视觉子系统包含深度彩色相机,该相机安装在检测区域上方的天花板中以检索深度信息。检测区域是由RFID天线和深度彩色摄像机的感测范围覆盖的重叠区域。计算机视觉子系统识别是否有人员进入检测区域,而RFID子系统识别每个人是否被授权。
1.2 RFID子系统的部署
RFID读取器读取检测区域中人佩戴的半身标签的唯一电子产品代码(EPC),以确定该人是否被授权[11]。如图2所示,天线附近配备了2个金属反射器来限制无线电收发的方向。此外,RFID读写器的功率也必须通过适当的设置让天线读写范围覆盖该区域的一半。如果天线从标签读取到EPC,则认为是一个人出现在检测区域。如果功率水平过高,则RFID阅读器天线的收发范围将超过检测区域,导致检测区域外的另一个授权人员被检测到,导致错误检测。

图2 2个金属反射器和RFID天线的设置
1.3 计算机视觉子系统和人数统计
由于未经授权的人员不能被射频识别系统检测到,但可以跟随被授权人员进入检测区域。因此,使用CV系统来捕获检测区域内的人员图像,并识别检测区域中的人数,其中包括授权和未授权的人员。如果所有人员都被授权,那么2个计数结果应该是相同的。
由于射频识别天线的覆盖范围难以控制[12],因此基于必须将摄像机的检测范围与射频识别天线检测区域相匹配的考虑,需要将检测区域设置为计算机视觉子系统和RFID子系统共同覆盖的区域。
对于CV系统,如果使用普通彩色摄像机,人的阴影可能会提前出现在检测区域[13],而授权人员尚未进入检测区域,因此RFID子系统无法检测到授权人员的任何EPC。系统会产生错误的检测结果。为了解决频繁的错误检测问题,本文采用了深度彩色摄像机来估计基于深度图像的人的数量。如图3所示,黄色点(颜色较浅)表示人体,绿色点(颜色较深)表示人体的位置。

图3 深度彩色摄像机图像
为了准确地检测区域中的人员数量,本文定义了检测区域的前后区域。如图4所示,人们按照前方区域、检测区域和后方区域的顺序移动。CV子系统捕获人员的图像并决定图像属于这3个区域中的哪一个。CV系统还对人员的数量进行估计。

图4 CV子系统对检测区域位置的定义
当人进入感应区域时,深度彩色摄像机根据预定义的范围向CV子系统发送轮廓信息。CV子系统为一个人选择合理尺寸的图像轮廓。如果轮廓太小,不能被定义为预定义范围内的人,那么它将被过滤掉。为图像的每个选定轮廓计算重心(CoG),以确定该人位于哪个区域。
1.4 检测未经授权的尾随
为了检测未授权的尾随,主系统需要根据RFID子系统和CV子系统的检测结果做出决定,如图5所示。由于CV子系统中的数据处理速度要快于RFID子系统中的数据处理速度,当授权人员进入检测区域时,在接收到来自RFID子系统的授权消息之前,主系统就从CV子系统接收数据,并判断这是一个未经授权的人,导致一个错误的检测结果。在本文所设计的系统中,RFID子系统和CV子系统的运行时间分别为175 ms和33 ms。因此,必须在数据传输之前添加CV子系统中的延迟时间(td)。
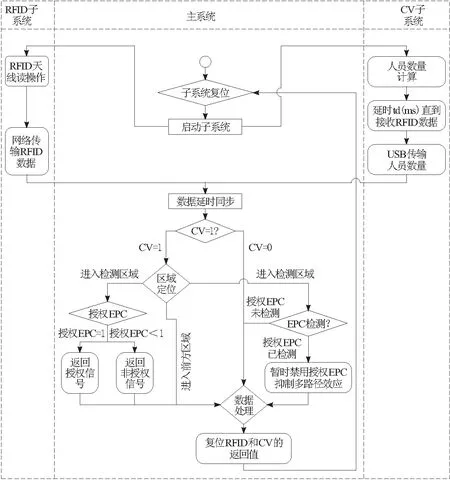
图5 尾随检测的流程
CV子系统将结果提交给主系统,这表明一个人进入检测区域(CV结果= 1)。主系统进一步确定它是否从RFID子系统接收授权数据(RFID结果= 1)或不接收(RFID结果= 0)。通过计算CV结果与RFID结果之间的差异,主系统能够检测尾随事件。
由于UHF RFID的多路径效应,当授权人员离开检测区域并进入后方区域时,RFID读取器继续读取EPC。因此,当一个授权人员和一个未经授权的人进入检测区域时,RFID子系统会继续提交授权数据(RFID结果= 1),而CV子系统也会将真实值(CV结果= 1)提交给系统表示未经授权的人员进入检测区域的主系统被授权。为了防止这样的错误决定,当授权人进入后区时,系统会临时禁用授权的EPC。该机制有效地抵消了超高频RFID的多路径干扰特性,提高了尾随检测的准确性。
2 实验验证
实验环境设置如图6a所示。其中,检测区域被设置在金属门的前方,以增加多路径效应的影响。在检测区域上方的两侧设置2个带有金属反射器的RFID全向天线。在检测区域上部署深度彩色摄像机。如图6b所示,胸部的人员佩戴了半身式的UHF RFID胸牌标签用于识别。
门前的通道限于1次通过1个人。如图7所示,在门前划定一个狭窄的检测区域(宽185 cm,长50 cm),使得1次只能有1个人进入检测区域。

图7 检测区域的设置
进行了2项实验:授权检测和未经授权的尾随。首先,测试检测区域的人员是否未经授权。当检测到未经授权的人时,系统返回正值;当未检测到未经授权的人时,系统返回负值。如表1所示,结果表明,该系统可以准确地检测单人情况下的权限。

表1 授权检测结果 %
第2个实验测试了不同移动距离之间的尾随检测的性能。如果一个未经授权的人员尾随另一个授权人员,系统返回一个正值。否则,如果尾随也被授权,则返回一个负值。测试结果如表2所示。

表2 尾随检测结果 %
由表2可知,对于未经授权的尾随,所有成功率都在92%以上。在编制人员尾随情况下,成功率分别为91%, 83%和78%,间隔分别为80 cm, 70 cm和60 cm。当2个人之间的距离变短时,系统判断的准确性降低。这表明尾随的RFID信号可以被前面的人员屏蔽,并且提高了误报率。
3 结束语
基于解决提高RFID访问控制系统可靠性和未授权尾随的访问控制问题,提出了一种智能安全访问控制系统的设计。该系统包含RFID子系统和计算机视觉子系统。在所提出的RFID子系统中,使用2个金属反射器来限制RFID阅读器天线的收发范围,以减少多路径效应。在所提出的计算机视觉子系统中,使用深度彩色相机来获取图像的深度信息,以计算实际人员数量。实验结果表明,该系统能提高射频识别的准确率并有效解决未授权的尾随问题。未来的工作将集中在解决多人通过通道的非授权尾随的情况。此外验证实验也需要在一个更复杂的环境中进行,以提高系统运行的可靠性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
汽车工程师(2021年12期)2022-01-17 02:29:46
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年12期)2021-03-09 05:38:30
铁道通信信号(2020年3期)2020-09-21 09:13:00
中国交通信息化(2019年2期)2019-03-25 03:20:16
铁道通信信号(2018年8期)2018-11-10 05:15:44
电子制作(2016年1期)2016-11-07 08:42:54
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
中国交通信息化(2015年10期)2015-06-06 06:39:32
