
汽车自动驾驶的关键技术研究
2018-10-24 02:58王羽张美芳张凯帆
世界汽车 2018年10期
王羽 张美芳 张凯帆
随着新一代科技革命的推进,全球各大整车制造企业、互联网企业、汽车零部件企业、传感器企业以及研究高校和企业都正在全力研发汽车自动驾驶技术及相关产品、测试技术和测试装备,各国政府也在加快汽车自动驾驶产业布局,推进测试场地建设、标准测试体系建设、道路测试规范建设等。其中最根本的是汽车自动驾驶技术,技术的智能性、稳定性、安全性及可靠性是所有相关产业蓬勃应声发展的根基。本文主要介绍汽车自动驾驶前沿技术发展现状,主要分3个部分进行阐述,分别是汽车自动驾驶技术概述、汽车自动驾驶关键技术现状、人工智能技术在汽车自动驾驶上的应用。
一、汽车自动驾驶技术概述
汽车自动驾驶技术是提高车辆自主识别规划控制能力,使车辆具备驾驶人的眼脑手脚功能,可实现更安全高效驾驶的单车基础技术。因此,汽车自动驾驶技术是逐步从传统交通系统中解放驾驶人并以智能化汽车为主体构建新型智能交通系统的核心技术。目前行业内汽车自动驾驶的智能化技术路径主要有两种,其主要区别在感知技术路线。一类是以传统较为廉价的摄像机为主导,辅以毫米波雷达等的多传感器融合方案,以特斯拉、福特、沃尔沃等传统整车企业为代表;另一类是以性优价高的32线或64线激光雷达为主导,依赖于高精度地图并辅以摄像机、毫米波雷达、超声波传感器等的技术方案,主要以谷歌、百度等IT企业为代表。现有的智能驾驶系统大都以激光雷达作为主传感器,但其成本居高不下,因此得益于人工智能技术发展的成本较低的以摄像机为主传感器的技术方案成为新的研究热点。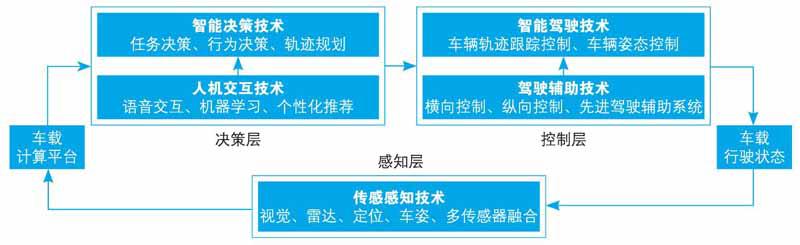
汽车自动驾驶技术架构从自动驾驶汽车的功能层角度分为感知层、决策层、控制层,其中的感知融合技术、智能辅助技术、智能驾驶技术、智能决策技术和人机交互技术等都需要车载计算平台来完成数据融合、高速计算、智能决策、协同控制,从而完成汽车行驶和信息交互过程中多源海量异构数据的高速计算处理,为决策和控制提供实时响应,实现汽车的自动驾驶。
二、汽车自动驾驶关键技术
智能化關键技术是汽车自动驾驶的最核心技术,主要包括多传感器融合技术、规划决策技术、控制执行技术、高精度地图构建和高精度定位技术。其中,感知、决策和控制技术是核心功能技术,高精度地图和高精度定位技术是行驶过程的基础性关键支撑技术,无论是感知决策规划还是控制执行都需要车辆自身和周边其他动静态物体的位置速度等信息。
1.感知数据融合技术
环境感知主要包括路面、静态物体和动态物体3个方面,感知数据的融合包括对多个传感器获取的动静态物体的检测识别定位信息、跟踪预测信息等的融合处理与反馈。其中对行人、非机动车辆和其他机动车等动态物体的运动行为做出预测,并能够根据当前运动速度计算出安全空间对智能汽车的自主决策是极其重要的。
多传感器信息融合技术主要有贝叶斯信息融合方法、卡尔曼滤波融合方法和神经网络融合法。贝叶斯信息融合方法是基于概率统计的推理方法,卡尔曼滤波方法可以从有限的、有噪声的观察序列中预测纠正进而推算出物体的位置等信息,神经网络方法通过大量的学习训练消除多传感器协同工作中产生的交叉影响效果。
2.规划决策技术
规划决策技术主要包括全局路径规划、局部行为决策和驾驶动作决策。其中全局路径规划是依赖于高精度地图的目的地间可选路径的规划过程;局部行为决策主要是依据当前行车环境下的感知信息和定位信息等作出巡航、换道、转弯、掉头等决策;驾驶动作决策主要根据局部行为决策信息将当前规划路径分为多个小范围路径,生成多个短距离路径的中间路径点,主要包含到达这些路径点时汽车自动驾驶应当具备的速度、加速度、车轮转向等具体指标信息。
感知融合技术与规划决策技术的核心是人工智能算法与计算平台,数据导入计算平台后由不同的芯片进行计算。现有的计算方案有基于GPU、DSP、FPGA、ASIC的解决方案,还有其他芯片方案。芯片方案主要有谷歌的TPU芯片、Mobileye? Eye QX?、NVIDIA Drive PX芯片、奥迪的Zfas等。同时,多家研发机构也在设计探索能够使用移动处理器完成计算任务的高效计算平台。
3.控制执行技术
控制执行技术主要借助于车载控制平台实现汽车自动驾驶的横纵向控制。核心任务是通过CAN总线获取规划决策层输出的多个中间路径点轨迹信息后,经过一系列结合车身属性和外界物理因素的动力学计算,转换成对车辆线控的油门、刹车的纵向控制命令和转向的横向控制命令来完成轨迹信息的执行。
车载控制平台是车辆的核心控制部件,主要包括电子控制单元ECU和通信总线两大部分。ECU主要实现算法控制,通信总线完成ECU和机械部件间的通信功能。汽车自动驾驶的车载控制平台与传统汽车的不同在于可根据需要改写ECU,主要有直接改变ECU运算器硬件的改装和改变内部程序的改装。后者主要是通过原ECU程序即改变处理问题的算法和运行法则来改变发动机的运行。
4.高精度地图构建与高精度定位技术
高精度地图是区别于传统电子地图的包含大量三维表征行车辅助信息的汽车自动驾驶专用地图。行车辅助信息主要包括路面的几何结构,周边道路环境的点云模型,车道的几何结构及坡度、曲率、限速等属性信息。机器不具备人类与生俱来的视觉识别和逻辑分析能力,必须借助高精度地图扩展车辆的静态环境感知能力,为汽车自动驾驶提供全局视野。
高精度地图的构建是一个多传感器融合的过程,主要包含光学雷达LiDAR、全球卫星导航系统GPS、陀螺仪IMU和轮距传感器。陀螺仪和轮距传感器可以高频率稍有偏差地给出自动驾驶汽车的位置预测,再融合GPS和LiDAR的数据算出当前车的准确位置,最后根据当前的准确位置与激光雷达的扫描数据,把新的数据加入地图中以此来逐步构建高精度地图。
高精度定位技术依赖于高精度地图信息,自动驾驶系统可以通过对比当前位置的传感器获取行车环境信息和高精度地图,精确地确认位置,并能够确认当前位置一段距离内的行车环境,可进行下一步轨迹规划和决策。
三、人工智能技术
人工智能技术在汽车自动驾驶上的应用主要在环境感知、规划决策与控制这三大功能的算法程序上,即运用深度学习、模糊逻辑、专家系统、遗传算法等方法,通过大数据的自主学习和训练,使汽车自动驾驶具备一定程度的智能水平。
1.人工智能在环境感知中的应用
计算机视觉在汽车自动驾驶上的应用有静态物体分类与交通信息识别、動态物体轨迹跟踪与行为预测,以及基于不同算法的车辆自身定位等方面。模式识别、卷积神经网络等方法可以用于计算机获取的大量图像视频信息处理,融合运动预测算法来实现运动物体的识别跟踪。
运动预测算法:主要有底层的Optical Flow与立体视觉技术,和基于马尔科夫决策过程的多个运动目标识别追踪算法等。Optical Flow是基于单个摄像头的连续时刻图像或视频序列中的像素级密集对应关系,立体视觉是基于多个摄像头的同一时刻图片,基于神经网络的监督学习可以通过对获取图像的训练得到场景的三维深度或距离估计,从而预测目标的运动轨迹。基于马尔刻度决策过程的多个运动目标识别追踪算法首先对运动目标进行马尔科夫建模,主要通过对马尔科夫状态空间的目标状态转换分析来完成对物体的追踪。
基于视觉的定位算法:主要有基于拓扑与地标的算法和基于几何的视觉里程计算法两种。基于拓扑与地标的算法把所有的地标组成一个拓扑图,自动驾驶汽车检测到某个地标时就可以大致推断出自身所在的位置,但该方法需要预先建立精准的拓扑图。基于几何的视觉里程计算法分单目和双目两种。单目视觉里程计算法的主要问题是无法推算出观测到的物体大小,需要与其他传感器的结合才能进行准确定位;双目视觉里程计算法通过左右两幅图的视差图和摄像机的几何特性计算出特征点的深度,找出帧与帧之间的特征点对应关系,推算出两帧之间车辆的运动,再依据之前车辆的位置计算得到最新的车辆位置。
2.人工智能在规划决策中的应用
行为决策与路径规划是人工智能在自动驾驶汽车领域中的另一个重要应用。增强学习可以有效地解决环境中存在的特殊情况,是通过和环境的交互来学习在对应的场景下进行规划和决策以达到最优驾驶行为的方法。其目的是在给定的任意环境下,通过对环境的探索学习到最佳的策略,采取最优化行为。常用的增强学习算法有REINFORCE算法和Deep Q-Learning算法。
现有的深度增强学习解决的问题中一般针对于短程路径,其执行行为也只对环境有短期影响。对于复杂决策的场景无法通过短期的效果得到最优决策策略,此时必须结合基于搜索的算法来解决问题。基于搜索的算法一般通过搜索树来实现,通过穷举搜索数的每个节点,用递归的方式计算出最值函数和最优策略。基于搜索的算法和基于增强学习算法的结合一方面能够通过搜索获取复杂决策场景的最优策略,一方面又能通过增强学习加速搜索过程,该方法在解决涉及长期规划问题方面具有巨大潜力。
3.人工智能在车辆控制中的应用
汽车自动驾驶的控制是指当收到控制指令后,控制系统调整车辆的机械参数使其达到控制目标的过程。人工智能在车辆控制中的应用主要在自动控制技术方面,主要集中在模糊控制和专家系统控制,主要通过控制器中的程序实现对电气系统的控制。模糊控制在车辆控制中的应用主要体现对行为与动作的智能处理,如对障碍物体的躲避、行进速度的调整以及对移动目标追踪等方面。车载传感器在完成信息采集后,会对信息进行融合处理作出判断,在模糊推理算法下,对优先级行为进行确定,通过汽车平台实现各项操作。专家系统控制主要是应用某一特定领域内大量的专家知识和推理方法解决问题的过程,其研究目标是学习模拟人类专家的推理处理过程,实现对车辆的控制。
四、结语
汽车自动驾驶是未来汽车发展的方向,是将探测、识别、判断、决策、优化、优选、执行、反馈、纠控功能融为一体,集微电脑、微电机、绿色环保动力系统、新型结构材料等顶尖科技成果为一体的智慧型汽车。总体来看,我国汽车自动驾驶的发展还需要多方面共同努力。汽车供应商对于各种车辆驾驶辅助功能的研究是无人驾驶汽车技术不断向前发展的源动力;政策与法律的制定与实施,又是无人驾驶汽车真正上路的前提。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14
学生天地(2020年5期)2020-08-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
电子测试(2018年10期)2018-06-26
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
汽车博览(2016年9期)2016-10-18
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10
交通建设与管理(2015年15期)2015-03-20
