仿人工挑带式滴灌带回收机研制与虚拟样机仿真
2018-10-23 01:58郭文松王钊英孙岳田玉泰胡灿散鋆龙
新疆农业科学 2018年8期
郭文松,王钊英,孙岳,田玉泰,胡灿,散鋆龙
(1.塔里木大学机械电气化工程学院,新疆阿拉尔 843300;2.中国农业大学工学院,北京 100083;3.新疆农业科学院,乌鲁木齐 830091)
0 引 言
【研究意义】膜下滴灌技术在提高农业用水效率、农民增产增收以及生态环境建设等方面发挥着重要作用[1-3],此技术在农田灌溉作业中普遍应用,滴灌带使用量日益增加,尤其在新疆地区应用广泛[4-6]。回收完成的滴灌带卸载困难,降低工作效率;回收过程中,滴灌带易断带,影响作业的连续性。设计一种模仿人工挑带动作的挑带式滴灌带回收机,对减轻农田滴灌带人口回收劳动力有实际意义。对农田中大量的滴灌带进行机械化回收。【前人研究的进展】丁双双等[7]设计了4HS型滴灌带回收机,可以一次性完成滴灌带的挑起、输送、收集等作业;汤爱民等[8]设计了2JMSD-4.5型揭膜、回收滴灌带机,该机春季可用于揭膜作业,秋季可用于滴灌带回收作业;龚贺贺等[9]设计了4HR 型滴灌带回收机,该机具有较好的适用性。【本研究切入点】人工回收滴灌带劳动强度大、经济成本高、回收效率低,而现有的滴灌带回收机存在着卸载困难、易断带等问题[10]。研究一种仿人工挑带动作的挑带式滴灌带回收机。【拟解决的关键问题】研究设计一种仿人工挑带动作的挑带式滴灌带回收机,对滴灌带回收机的关键作业机构进行建模分析,确定滴灌带卷带机构、导向机构以及挑带机构方案,并进行样机田间试验研究。
1 材料与方法
1.1 材 料
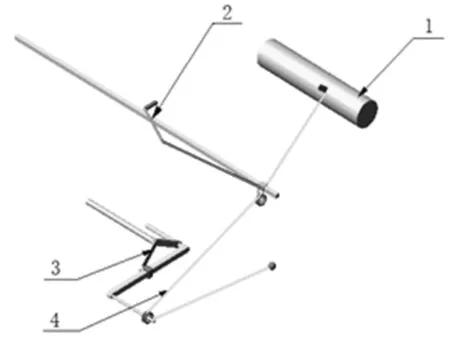
挑带式滴灌带回收机主要由卷带机构、导向机构、挑带机构、机架等组成。图1
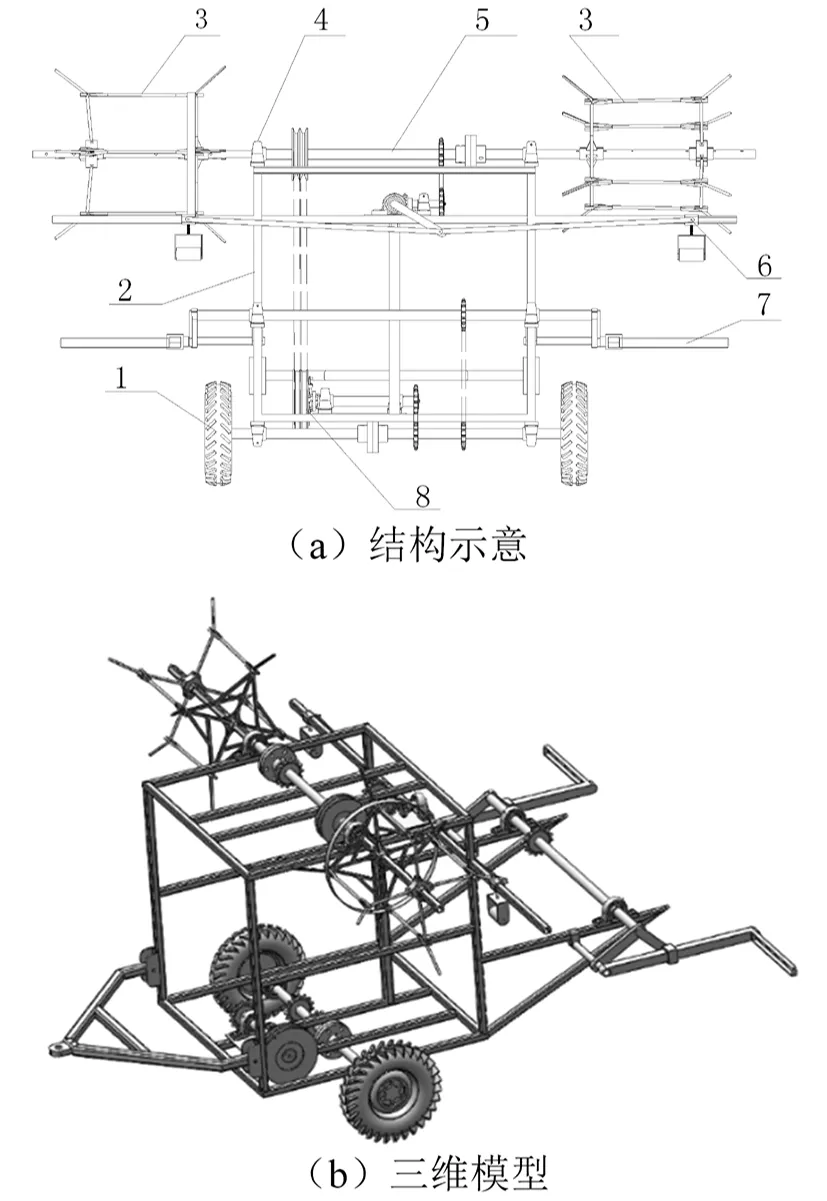
注:1.车轮;2.机架; 3.卷带机构; 4.支撑轴承; 5.卷带主轴; 6.导向机构; 7.挑带机构; 8.安全离合器
Note:1.Vehicle wheel; 2.Frame; 3.Belt mechanism;4.Axial bearing; 5.The principal axis of belt mechanism; 6.Guiding mechanism; 7.Suspension mechanism; 8.SafeClutch
图1 挑带式滴灌带回收机
Fig.1 The picking up mode drip irrigation belt recovery machine
1.2 方 法
回收机由小四轮拖拉机牵引前进,依靠地轮为卷带机构、导向机构、挑带机构提供动力。工作时,将滴灌带的首端穿过导向机构和挑带机构,然后固定在卷带机构上。利用挑带机构带着滴灌管竖直方向上下摆动将埋藏于土壤表层的滴灌带抖出地面,利用导向机构水平往复摆动引导滴灌带均匀的缠绕于卷带机构上。当滴灌带缠满时,停止拖拉机,将卷带机构的限位滑块向内侧移动,卷带机构的外侧口径变小,回收的滴灌带便可以轻松拆卸。
地轮和卷带机构之间的离合器采用安全离合器。开始工作时,滴灌带回收机的前进速度和卷带机构的缠绕速度一致,当卷带机构上滴灌带越来越多时,卷带机构的工作半径也逐渐增大,作用在卷带机构上的力矩逐渐增大,当卷带机构承受的力矩大于安全离合器的设定值时,安全离合器自动松开,卷带机构停止转动;当滴灌带回收机前进一段距离后,滴灌带不在拉紧卷带机构,卷带机构继续工作。当卷带机构,卷到一定程度时,利用安全离合器,采用卷带机构间歇运行的方法,缓解前进速度和卷带速度不匹配的问题。
2 结果与分析
2.1 卷带机构
卷带机构由卷带主轴、固定支杆、活动支杆、卷绕杆、滑块、限位销组成。卷带机构采用连杆结构组成,机构的一端固定,另一端可沿着卷带主轴滑动。卷带主轴上有限位孔,利用限位孔和滑块可以将卷带机构调整为两种状态:工作状态,如图2(a);卸载状态,如图2(b)。工作状态时卷带机构呈完全撑开状,卷带主轴带动卷带机构旋转,将滴灌带卷绕在卷带机构上;卸载状态时活动支杆内移、外侧口径收缩,可实现滴灌带的快速卸载。图2

注:1.卷带主轴; 2.固定支杆; 3.卷绕杆; 4.活动支杆; 5.滑块; 6.限位销;7.销孔
Note:1.The principal axis of belt mechanism; 2.Fixed support; 3.Winding bar; 4.Movable support; 5.Sliding block; 6.Arresting pin; 7.Pin hole
图2 卷带机构不同状态下的三维模型
Fig.2 The three-dimensional model in the different state of the belt mechanism
2.2 导向机构
2.2.1 导向机构的设计
导向机构安装在机架后端的横梁上,主要由传动机构、连杆、摇杆、导向滑块,等组成。导向机构的动力由卷带主轴经链传动传递给锥齿轮机构,驱动导向机构运动,从而使得导向滑块引导滴灌带沿横梁水平方向往复运动。导向机构的三维结构。图3
注:1.连杆; 2.横梁; 3.锥齿轮传动; 4.链轮; 5.摇杆;6.导向滑块
Note:1.Connecting rod; 2.Crossgirder; 3.Bevel gearing; 4.Chain wheel; 5.Rocker bar; 6.The sliding block of guiding
图3 导向机构的三维模型
Fig.3 Three-dimensional model of guiding mechanism
2.2.2 导向机构的参数优化
为了求解导向机构传动效果最佳时,导向机构的参数,建立了导向机构的数学模型,结构示意图如图4所示。以滑块行程和行程速比一定,最小传动角γ最大的设计方法,对导向机构运动学模型进行求解[11-13]。图4
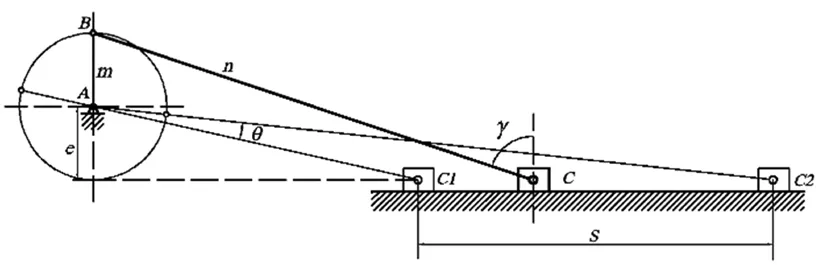
图4 导向机构运动示意
Fig.4 The motion diagram of guiding mechanism
图4中,m为曲柄的长度,n为连杆的长度,s为滑块的行程,e为偏距,γ为传动角。
由于卷带机构的长度为400 mm,因此滑块行程s为400 mm。导向机构在运动过程中,γ值是变化的,当曲柄与滑块导路垂直时,γ值最小,其值为:
(1)
由式(1)可知,γ的最小值与m,n,e三个参数有关,按照设计方法,只要确定这3个参数能够保证γ最小值最大即可。
记滑块在左端极限位置为C1,右端极限位置为C2,AC1,AC2的夹角为极位夹角θ,则:
把AC1的长度设为变量x,x=n-m。行程速比K一般取小于2的值[14],此设计取K=1.5,则θ=36。
在△AC1C2中
S2=(m+n)2+(n-m)2-2(n-m)(n+m)cosθ.
(2)
把n=x+m代入(2)式得
(3)
由正弦定理得
(4)
将n=x+m代入(1)式得
(5)
联立式(3)(4)(5)方程且代入s=400,θ=36可得:
γ=
(6)
由式6可知γ仅与x有关,由图4知设计变量x的取值范围为[0,S/tanθ],通过Matlab优化分析此式,得到γ与x关系曲线如图5所示[15-16]:
由图5可知当x=284时,最小传动角最大,为55.097 6°,将x=284代入式(3)(4)及n=x+m,可得:曲柄m=155 mm,连杆n=439 mm,偏心距e=248 mm。图5
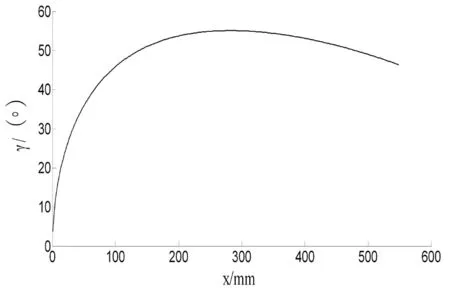
图5 γ与x的曲线关系
Fig.5 The relation between γ and x
2.3 挑带机构
2.3.1 挑带机构的结构设计
为了模拟人工在回收滴灌带过程中的挑动滴灌带的动作将滴灌带从表层土壤中挑出来。设计了一种挑带机构,主要由传动轴、曲柄、挑杆、导向孔组成。工作时,滴灌带穿过导向孔,地轮通过链传动将动力传递给传动轴,驱动挑杆上下往复运动,不断的挑动滴灌带从表层土壤中挑出。图6

注:1.固定支架; 2.链轮; 3.传动轴; 4.曲柄;5.挑杆; 6.导向孔; 7.滑块
Note:1.Fixed support; 2.Chain wheel; 3.Transmission shaft; 4.Crank; 5.Take-up lever; 6.Pilot hole; 7.Sliding block
图6 挑带机构的三维模型
Fig.6 Three-dimensional model of pick the belt mechanism
2.3.2 挑带机构的参数优化
为获得较为理想的挑带效果,设定挑带高度为500 mm,即挑杆末端CC'间的垂直距离。
挑带机构的运动简图中,AB为曲柄l1,OA为固定连杆l2,OC为挑杆l3,C、C'分别代表挑杆摆动的下极限位置和上极限位置。考虑到合理利用机构空间,取l2=200 mm;考虑到挑杆的摆动角度以及C点距地面的高度,取∠COC'=90°,即OC⊥OC',摇杆下极限位置与水平方向夹角β=90°。图7
根据挑杆挑带高度,建立曲柄摇杆机构的几何数学模型,求解能够满足其挑带高度的曲柄l1及挑杆l3的长度。
由上述条件可知:
α+β=90°.
(7)
根据上述几何模型在竖直方向的长度分量得:
l3sinα+l3sinβ=500.
(8)
建立杆长与挑杆摆动角度的方程式:
(9)
联立上述方程解得:l1=141 mm,l3=366 mm
因此,挑带机构曲柄长度141mm,挑杆长度366 mm时,挑带高度可达到设定要求。
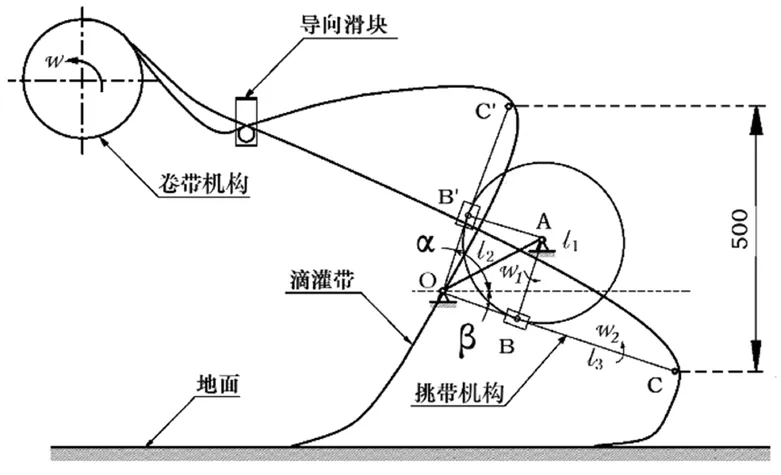
图7 挑带机构运动
Fig.7 The schematic diagram of picking-belt mechanism
2.4 滴灌带回收过程虚拟样机仿真
为了优化挑带式滴灌带回收机挑带机构和导向机构的转速,解决滴灌带回收机在工作过程中断带问题,建立了滴灌带回收机的虚拟样机模型,并仿真研究不同的工作参数时滴灌带内部的张力。
根据GB/T19812.1-2005《塑料节水灌溉器材单翼迷宫式滴灌带》拉伸性能试验规定:滴灌带的最大承受拉力不应小于130 N[17]。当滴灌带内张力大于130 N时,滴灌带可能出现断带。
2.4.1 虚拟样机的建立
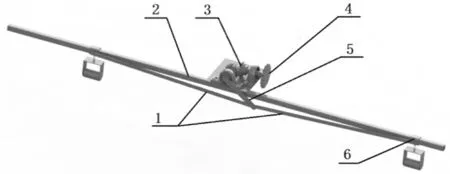
采用Adams动力学仿真软件来建立挑带式滴灌带回收机虚拟样机[18-20]。将卷带机构、导向机构、挑带机构分别进行简化,简化后的虚拟样机模型。图8
注:1.卷带机构; 2.导向机构; 3.挑带机构; 4.滴灌带
Note:1.Belt mechanism; 2.Guiding device; 3.Suspension device; 4.Drip irrigation
图8 滴灌带虚拟样机
Fig.8 The virtual prototype of drip irrigation belt
虚拟样机中将卷带机构简化为旋转的圆柱体,导向机构和挑带机构仅建立了单侧模型,并简化掉了传动机构。滴灌带则采用Adams 软件自带的Cable模块建模,该模块可以对复杂柔索机构进行建模仿真[21-22]。滴灌带的建模过程为:在卷带机构和地块上分别设置一个锚点,地块上的锚点建立在仅可以水平移动的小球上,用小球仅可在水平方向移动来模拟滴灌带真实地面上滴灌带的移动。在导向机构的滑块和挑带机构的导向块上各固定一个滑轮,则滑轮可随着挑带机构和导向机构运动,最后将绳索按照一定的顺序缠绕在锚点和滑轮上。
2.4.2 仿真试验结果
为了保证良好的卷带效果,卷带机构的线速度和滴灌带回收机的前进速度应基本保持一致。卷带机构的周长为2 m,当回收机前进速度为7.2 Km/h时,卷带转速为1 r/s。此虚拟样机仿真,设定卷带转速为1 r/s。
采用的简化模型的方法,仿真时间为2 s。这种方法的优点是建模方便、仿真效率高,可以有效的传递力和运动。设置的仿真参数主要为:滴灌带参数和接触参数。滴灌带参数:密度设定为910 kg/m3;杨氏模量为4E7 N/mm2,阻尼系数设定为0.01,网格设定为0.15,其它值设定为默认值。滴灌带和滑轮之间的接触参数设置:接触刚度为1E4 N/mm;阻尼系数为0.2 N*sec/mm;刚度贡献因子设定为1.5。
2.4.2.1 导向机构转速对滴灌带内张力的影响
卷带转速为1r/s,挑带机构转速为0.8 r/s时。设置仿真时间设置为2 s,步数为300。仿真得到的导向机构转速为1、2、3、4 r/s时滴灌带内张力的变化规律。图9
当转速为1、2、3、4 r/s,滴灌带内最大张力分别为110、125、160、200 N。随着导向机构转速的增加,滴灌带内张力逐渐增加。当转速为3 r/s、4 r/s时,滴灌内最大张力值为160 N,200 N大于滴灌带的最大拉力130 N,极有可能会出现断带问题。当转速为2 r/s时,滴灌带内张力125 N,接近130 N。因此挑带机构的转速应<1 r/s,选取导向机构转速为0.8 r/s。图9
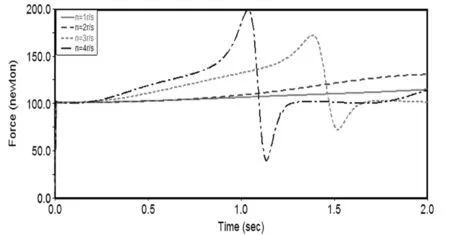
图9 导向机构转速下滴灌带内张力变化
Fig.9 Simulation of the influence of the speed of guiding mechanism on the internal tension of drip irrigation
2.4.2.2 挑带机构转速对滴灌带内张力的影响
卷带机构转速为1.0 r/s,导向机构转速为0.6 r/s。设置仿真时间设置为2 s,步数为300。仿真得到的挑带机构的转速为1、2、3和4 r/s时,滴灌带内张力的变化规律为,当挑带机构转速为1、2、3和4 r/s时,滴灌带内最大张力分别为125、150、160、185 N。随着挑带机构转速的增加,滴灌带内最大张力值逐渐增加。当转速为1 r/s时,滴灌带内最大张力值125 N<130 N,由此可知,挑带机构的转速应<1 r/s,选取挑带机构转速为0.6 r/s。图10
2.5 田间试验
新疆阿拉尔市9团团场的青储饲料地;覆膜滴灌作业地,试验区的长度约为500 m,宽度约为200 m;滴灌带为当年铺设在田间的新滴灌带;20马力的轮式拖拉机;2017年9月。通过对田间作业试验,1 h作业约1 hm2,对滴灌带的损伤较小,无明显的断带等现象出现。
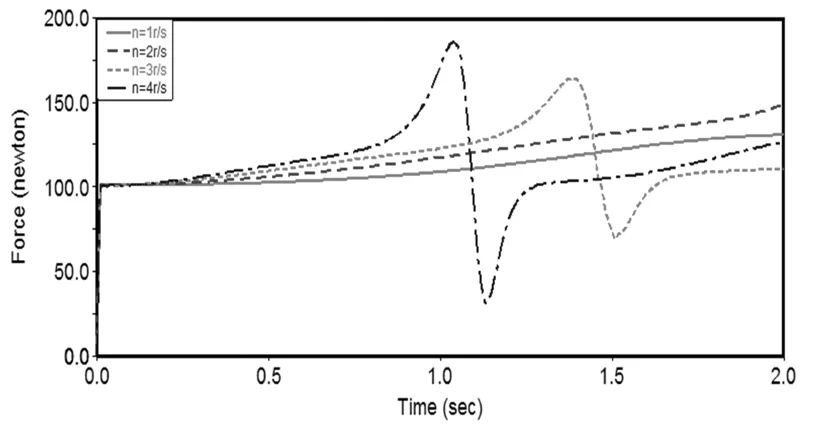
图10 挑带机构转速下滴灌带内张力变化
Fig.10 Force curve of the drip irrigation belt under different rotating speed of the beltmechanism
3 讨 论
3.1 仿人工挑带式滴灌带回收机,能够模拟人工回收滴灌带动作,解决人工回收劳动强度大、卸载困难、易断带等问题,同时提高了回收效率,大大减轻农民负担。
3.2 按照国家标准采用了滴灌带的最大拉力为130 N为设计依据,并按此值进行虚拟样机优化分析。在实际生产中,如果大田中铺设的为往年的滴灌带或者劣质滴灌带,其最大拉力小于130 N。回收此类滴灌带时会容易出现断带现象。
3.3 大田实验中的滴灌带埋藏于土壤表层,在挑带过程中,滴灌带受到土壤、杂草、地膜等的阻力作用,如果阻力过大也会出现断带现象,下一步在建立虚拟样机时应考虑到以上的阻力的影响。
4 结 论
4.1 针对现有的滴灌带回收机存在卸载困难、易断带问题,研制了一种挑带式滴灌带回收机,主要由机架、卷带机构、导向机构、挑带机构,安全离合器等组成。利用安全离合器采用卷带机构间歇运行的方法,缓解前进速度和卷带速度不匹配的问题;卷带机构由多连杆机构组成,通过移动滑块减小卷带机构的口径,可快速的完成滴灌带的卸载。
4.2 建立并求解了导向机构的数学模型,获得导向机构的最佳结构参数为:曲柄长度为155 mm,连杆长度为439 mm,偏心距e为248 mm,此时的最小传动角的最大,传动效果最优;建立并求解了挑带机构的数学模型,获得:挑带机构曲柄长度为141 mm,挑杆长度为366 mm时,可满足挑带高度500 mm的要求。
4.3 建立了滴灌带回收机的虚拟样机模型,通过仿真研究发现:随着导向机构和挑带机构转速的增加,滴灌带内最大张力值逐渐增加,最终确定导向机构的转速为0.8 r/s,挑带机构转速为0.6 r/s。
4.4 对当年铺设在田间的新滴灌带进行回收作业试验,1 h作业面积约1 hm2(15亩),作业效果较好,对滴灌带的损伤较小,无明显的断带等现象。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
南方农机(2021年3期)2021-02-07
装备制造技术(2020年4期)2020-12-25
今日农业(2020年16期)2020-12-14
湖北农机化(2020年17期)2020-11-02
房地产导刊(2020年6期)2020-07-25
环球时报(2020-03-30)2020-03-30
中国棉花(2017年10期)2017-11-04
新商务周刊(2017年5期)2017-10-16
中西医结合心血管病电子杂志(2016年27期)2017-06-20