无人作战飞机一对一超视距空战态势评估
2018-10-18 00:57王光辉徐光达谢宇鹏
指挥控制与仿真 2018年5期
王光辉,徐光达,谢宇鹏,吕 超
(海军航空大学,山东烟台 264001)
近年来,各军事强国正不断为无人作战飞机(Unmanned Combat Aerial Vehicle,UCAV)装配空战武器,大力发展其对空作战能力,将使UCAV成为未来空战中的制胜利器。但就目前UCAV本身的自主化等级与智能化程度而言,UCAV还难以进行激烈的近距格斗,其近期空战模式将以超视距空战为主[1]。一对一空战是现代空战的最基本形式,在一定的战术背景下具有自主决断、自由发挥、灵活对抗的特点,也成为了各国开展自由空战竞赛比武中的主要空战样式。因此,在一对一空战条件下,如何使UCAV在短时间内快速准确地评估出战场态势,占据攻击优势,是一个当前亟待研究解决的关键问题。
空战态势评估是对战场上敌我双方空战力量各态势要素的动态评价过程[2]。目前,现有文献研究空战态势评估问题的关注点多数集中于超视距编队空战和多机协同空战,而对于一对一空战条件下的UCAV态势评估问题研究较少。具体评估方法以非参量法模型为主。例如,文献[3-5]均采用改进的非参量法构造优势函数。在对评估模型的改进上,主要基于空空导弹攻击区和导弹射程对距离优势函数的影响进行分析。这种改进的非参量法模型简单实用、易于解算,考虑的影响因素相对全面,但是在计算战机总体的空战优势时,仅仅是用加权求和或是权值相乘的方法进行运算,人为因素过多,难以体现函数公式的客观性与合理性。针对这一情况,文献[6]采用模糊综合评判法研究了空战多目标威胁评估问题,但只研究了一级模糊综合评判模型,且难以适用于一对一空战。本文在构建双层超视距空战优势模型的基础上,利用改进的多级模糊综合评判决策方法针对一对一超视距空战背景下的UCAV空战态势评估问题进行深入研究,该方法不仅能体现出空战态势概念的模糊性,还能有效避免主观因素的过多影响使评估结果尽量客观,最后结合具体实例验证了该模型的合理性与可行性。
1 UCAV空战优势模型
空战态势因素对UCAV空战效能的发挥起着决定性的作用。因此,建立UCAV空战优势模型时,应首先对空战态势影响因素进行综合分析,并以此为理论依据。UCAV进行一对一超视距空战时,影响双方空战态势的主要因素是由战机本身空战能力决定的静态性能和由各传感器获得的实时目标信息所体现出的动态性能[7]。考虑以上两方面便可建立双层空战优势模型,如图1所示。该模型中,把静态性能与动态性能作为第一级影响因素,而将距离、速度、角度以及能量作为第二级影响因素。由该空战优势模型,参考超视距空战的相关资料,便可建立相应的静态性能优势函数与动态性能优势函数,这两种函数可将上述影响因素定量表示,并能体现出UCAV超视距过程中根据这些影响因素自主选择有利攻击条件以发射空空导弹的实战特点。由于现有的UCAV自主等级有限,尚不具备超视距自主空战能力,因此本文主要借鉴有人战斗机的数学模型,加以改进,建立各优势函数。

图1 双层UCAV空战优势模型
1.1 静态性能优势函数
静态性能优势函数主要决定于UCAV的空战能力,UCAV的空战能力一般可用对数法[8]来表示,具体表达式为
S=[lnB+ln(∑A+1)+ln(∑A*)]ε1ε2ε3ε4
(1)
式中:B为UCAV机动能力系数;A为航空火力系数;A*为探测能力系数;ε1为操纵能力系数;ε2为生存力系数;ε3为航程系数;ε4为电子对抗能力系数。
UCAV的静态性能优势可用敌我双方UCAV的空战能力的比值来表示,定义空战能力比
(2)
定义UCAV的静态性能优势函数为

(3)
式中:SA为我方UCAV空战能力;ST为敌方UCAV空战能力。
1.2 动态性能优势函数
UCAV的战斗力不仅体现在战机本身卓越的静态性能上,还与其智能控制、自主决策等动态性能水平紧密相关。所以,在建立静态性能优势函数的基础上,进一步构建动态性能优势函数。近些年来的学术观点认为,动态性能优势函数的决定性因素主要有距离、接近速度、角度和战机能量[9]。在选取这四方面评估内容的基础上,分别构造相应的优势函数。
1.2.1 距离优势函数
本文在考虑敌我双方UCAV距离、雷达探测距离的基础上,结合空空导弹攻击区的影响,构建距离优势函数如下:

(4)
式中,D为目标线距离;DRmax为UCAV机载雷达最大发现距离;DMmax为UCAV挂载空空导弹最大射程;DMkmax为空空导弹最大不可逃逸距离;DMmin为空空导弹最小攻击距离。
1.2.2 速度优势函数
超视距空战中,接近速度大的一方更容易夺取战场主动权,获得较大优势。这里,定义接近速度为目标机在单位时间内接近观察者的距离。以交战双方的接近速度为评判依据,得到速度优势函数为
(5)

1.2.3 角度优势函数
目标方位角作为目标信息中的重要指标,决定了UCAV的角度优势,在此考虑雷达最大发现角、空空导弹最大离轴角和导弹最大不可逃逸离轴角等参数,建立角度优势函数为:

(6)
式中:φ为目标方位角;φRmax为UCAV机载雷达最大发现角;φMmax为UCAV挂载的空空导弹最大离轴发射角;φMkmax为空空导弹不可逃逸离轴角。
1.2.4 能量优势函数

(7)
式中:E为战机能量;EA为我方UCAV能量;ET为敌方UCAV能量;H为战机高度;v为战机速度;g为当地重力加速度。
2 二级模糊综合评判模型
由于空战中多数态势信息具有不确定性的特点,且难以用恒定数值精确表示,所以采用模糊综合评判方法对空战各态势影响因素进行合理量化。模糊综合评判法就是应用模糊关系合成的原理,从多个因素(指标)对被评价事物隶属等级状况进行综合性评判的一种方法[10]。其数学模型可分为一级模型与多级模型。该方法能够较好地解决模糊、难以量化的问题。而空战态势评估恰恰属于多层次、多因素的复杂评判问题,对于第1节中构建的双层空战优势模型,建立二级模糊综合评判模型进行评估,能够有效建立起双方UCAV与空战态势影响因素间的模糊关系。
2.1 基于一级模型的模糊综合评判
采用一级模型进行评判时,具体步骤如下[11]:
Step1 建立评判对象因素集U={u1,u2,…,um}。评价体系中的各因素即评价对象的参数指标。
Step2 建立评判集V={v1,v2,…,vn}。在空战中,对空战态势的评价,评判集就是各战机空战优势的集合。


(8)
Step4 综合评判。首先需要确定权重向量A:

(9)

2.2 基于二级模型的模糊综合评判
二级模型的主要思想是:首先将因素集合按照一定原则划分为两层。先对第二层的各影响因素进行综合评判,再将第一层中的因素作为单一的元素进行归集完成第一层的综合评判。设因素集为U={u1,u2,…,um},评判集为V={v1,v2,…,vn},评判的具体步骤为[12]:
Step1 划分因素集U。对因素集U作划分,得
U={U1,U2,…,Uk}
(10)
称式(10)为第一级因素集,并且有
定义Ui为第二级因素集,且满足

(11)
(12)
式中, 为 的单因素评判。
(13)
最终可计算出总的综合评判结果,即
2.3 模糊合成算子的选取
选择合适的合成算子能够使评估结果更趋合理。一般情况下,常用的模糊算子包括:M(∧,∨),M(·,∨),M(∨,⨁)和M(·,⨁)四种[13]。通过对上述四种算子的比较分析,前三种未能充分利用对于每个因素所做的评判信息,而第四种为加权平均模型,对各因素按权重大小能够做到统筹兼顾,故最为合理。该模型表达式为:

(14)
2.4 态势判定
态势等级判定采取模糊论域划分[14]的方法,这种数值区间的划分形式,能够更科学合理地表达一对一的空战态势。以P∈[0,1]为论域定义关于空战优势函数的5个模糊集:完全劣势、稍占劣势、均势、稍占优势、完全优势。与之对应的每个模糊集的论域划分如下:完全劣势=[0,0.20]、稍占劣势=[0.20,0.40]、均势=[0.40,0.60]、稍占优势=[0.40,0.60]、完全优势=[0.80,1]。

3 实例分析
假设某次空战中,我方1架UCAV(A机)与敌方1架UCAV(T机)遭遇并进行一对一超视距空战,双方战机均携带4枚同种类型的具备全向攻击能力的空空导弹,由于敌机型号、位置、航向、飞行速度的不同会导致对我方UCAV产生的威胁态势也有所不同。在这里,笔者将根据敌机的上述参数分为四种情况讨论。双方战机的一对一超视距空战信息和所挂载的空空导弹的性能参数如表1、表2所示。

表1 一对一超视距空战战机信息表

表2 空空导弹攻击参数表
利用2.2节中建立的二级模糊综合评判模型计算我方UCAV对敌方战机的空战优势,具体步骤如下:
Step1 设一对一超视距空战的因素集为U={u1,u2,u3,u4,u5},其中,u1为静态性能优势函数;u2为距离优势函数;u3为速度优势函数;u4为角度优势函数;u5为能量优势函数。根据上面建立的空战优势模型,将因素集U分为两组,即静态性能因素集U1={u1}和动态性能因素集U2={u2,u3,u4,u5}。综合专家评定意见,采用层次分析法求解出第一层因素集U={U1,U2}的权重向量为ω1=(0.43,0.57)。
Step2 建立评判集V={v1,v2,v3,v4},其中:v1、v2、v3、v4分别表示我方UCAV(A机)对上述四种情况下敌机T1,T2,T3,T4的空战优势。
Step3 构造单因素评判矩阵。将超视距空战优势模型中确定的所有优势函数作为隶属度函数,并结合评判集各方案构建模糊关系矩阵R=(rij)。
第一组静态性能因素集U={u1}主要由UCAV的空战能力优势指数决定。双方战机的空战能力指数在表1中已经给出。
对于第二组动态性能因素集U2={u2,u3,u4,u5},利用层次分析法求得权重向量ω2=(0.35,0.27,0.25,0.13),则计算得到单因素评判矩阵为
采用M(·,+)运算法则作一级综合评判,得到
B2=A2*R2=(0.6252,0.6137,0.6141,0.4301)
则总的单因素评判矩阵为
Step4 进行综合评判
1)求解综合评判结果。经计算得

同理得,敌方UCAV上述四种情况下对我方UCAV的空战优势为
2)根据综合评判结果进行最终的态势判定,判定结果如表3所示。
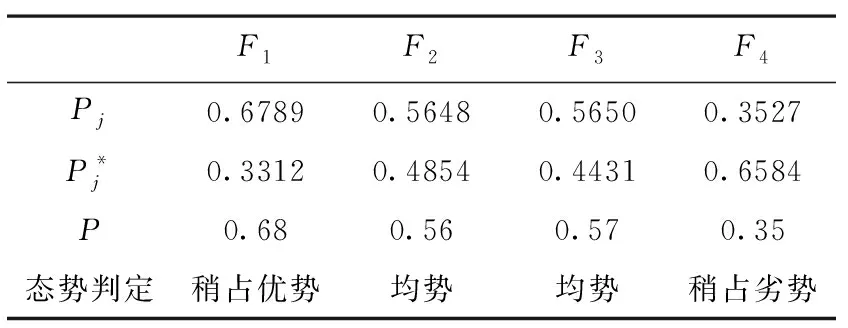
表3 空战态势判定表
3)评估结果分析
CASE1与CASE3中我机与敌机均形成了一对一迎头对攻的初始态势。CASE1中由于我机靠近速度较快、雷达探测范围较广且战机本身性能优于敌机,故我机对敌机占据一定优势。而CASE3中,我机虽然占有速度优势,雷达性能也优于敌机,但敌机占据高度优势,能够比我机优先抢占到最佳的攻击位置,弥补速度、角度等方面的劣势,总的来说,我机对敌机并没有较大胜算。
CASE2中我机对敌机形成了斜对头拦截的攻击态势,在初始位置上占据一定的角度优势,但敌机航速比我机快,比较容易逃逸,故我机也没有十足的把握击落敌机。
CASE4中我机侧翼暴露给敌机,敌机对我机形成了斜对头拦截的攻击态势,且敌机在速度与高度上均占优,战机能量大于我机,且战机性能较强,我机仅在雷达性能上占优,故与敌机相比处于下风,应实施规避机动脱离战斗。
综上所述,利用模糊综合评判方法计算出的结果与以上定性分析的结果基本相符,从而说明本方法符合空战实际。通过空战态势判定表,我方UCAV可迅速判明当前的空战态势,进行后续的自主决策。
4 结束语
空战态势评估是UCAV进行自主决策的基础,也是赢得未来智能空战的关键环节。本文在分析了决定空战态势的各主要影响因素的基础上,建立了UCAV一对一超视距空战优势模型,针对空战态势评估问题的多层次、多因素的特点,提出了基于二级模糊综合评判方法的空战态势评估模型。实例计算结果贴近空战实际,验证了该方法的合理性与有效性,为UCAV实施自主攻击提供重要依据。
猜你喜欢
文史春秋(2022年4期)2022-06-16
小哥白尼(军事科学)(2022年1期)2022-04-26
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
小哥白尼(军事科学)(2021年9期)2022-01-17
中国计算机报(2020年9期)2020-03-25
科技视界(2018年8期)2018-06-08
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
文苑(2014年16期)2014-08-15