
太阳能板自动清洗机器人
2018-10-16 07:31陆定超陈嘉齐李金鹏贾淳翔
机电产品开发与创新 2018年5期
陆定超,陈嘉齐,卢 琳,李金鹏,贾淳翔
(沈阳城市建设学院 交通与机械工程系,辽宁 沈阳 110167)
0 引言
人类的进步,都是以能源为基础的,随着社会的高速发展,传统能源枯竭的趋势日益明显,太阳能作为一种取之不尽,用之不竭的新兴能源,越来越受到重视。以及国内对能源利用的转型,使得光伏电站的建设力度也得到了增加。然而太阳能板常年工作在露天环境下,容易沾染灰尘,使得太阳能板的发电效率变低。目前对太阳能板的清洗方式还是人工清洗,由于光伏电站的占地面积巨大,人力组织一次清洗费时费力。另外,一些地处山坡等地的光伏电站,人工清洗不方便而且危险。因此出现清洗太阳能板的机器人,经过调查发现大部分机器人的尺寸只针对一些特定大小的太阳能板进行清洗,无法适应不同面积大小的太阳能板。另外一些不受太阳能板尺寸限制的机器人,工作效率不高。本项目的研究目的便是制作一种机器人,在做到在适应不同规格太阳能板的同时还能提高工作效率。
1 机械结构设计
机器人的设计主要分成机械机构设计和程序设计两个方向。为了方便制造,将结构设计分成两大部分,一部分为行进机构,另一部分为清洗模块。
1.1 行进机构
太阳能板的外形大部分属于矩形,因此将机器人的运动方式分成互相垂直两个方向上的两轴运动。机器人的运动由两部24V直流电机驱动,其中一部电机带动整个机器人在太阳能板上的横向水平运动,另外一部24V直流电机通过同步带驱动清洗机构在机器人框架内部的纵向移动。通过程序控制使得机器人按照规定的轨迹进行运动,达到机器人在太阳能板上清洗时运动的能力。
为了达到范围内自由伸缩的功能,利用5组导轨和滑块以及型材组合实现。

图1 收缩状态Fig.1 The state of contraction

图2 伸长状态Fig.2 The state of elongation
1.2 清洗模块
在产生相同电量的情况下,光伏电站的占地面积往往比普通的火力发电站所占的面积更大,因此为了满足一定的装机总量,巨大的占地面积使得光伏电站一般建在沙漠,山地,丘陵等环境下,而不同的环境对太阳能板表面的影响也不同。因此将清洗结构做成模块化,可通过螺丝快速拆装,以方便清洗不同环境下太阳能板表面不同的污渍。
在沙漠环境中,缺少水分,扬沙天气繁多等因素,使得太阳能板表面的污渍大部分属于沙子等细小颗粒。只需要轻微的擦拭就可以除去灰尘,因此清洗模块可以是带有毛刷辊的装置。
在山地,丘陵等地,相对充沛的雨水,雾霾天气以及个别距离城区较近的地区,城市建筑粉尘对太阳能板的共同作用,使得表面的污渍大多是结块状的斑点积灰。单一的毛刷辊结构难以清洗干净太阳能表面,因此清洗模块可以是以水为主,毛刷辊为辅的复合清洗装置。
另外在经费,技术允许的条件下,可以将清洗模块做成类似吸尘器,静电除尘机等装置。
2 程序设计
Arduino作为一种被广泛被使用的单片机,其上手简单,因而以它为基础,对整个机器人的运动进行控制。
分析机器人行走路线,此处所描述的路线即清洗模块的行进轨迹,在太阳能板上建立10×10的XY坐标轴,以清洗模块的中心为准,清洗模块走的轨迹如下:
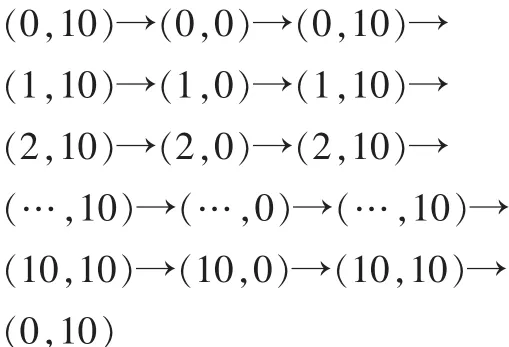
机器人运动顺序以及程序的设计:
(1)清洗模块开始工作。
(2)此时整个机器人在太阳能板的左上角开始运作,内部的清洗模块向下行进,当安装在滑台最下侧的光电传感器接收到一个信号 (即清洗模块到达了太阳能板的最下方),电机2开始反转,使清洗模块向之前的反方向运动回来,直到安装在滑台最上方的光电传感器接收到不同的信号(即清洗模块到达了太阳能板的最上方)。此时太阳能板的最左侧一条宽度与清洗模块左右宽度相似的区域便清洗完成。
(3)完成2中的步骤之后,电机2停止运作,即保持整个机器人靠在太阳能板的左侧。此时电机1开始正转,使得整个机器人向右行进,通过设置延迟子程序使得电机1转动一段时间。当走过的距离和清洗模块的左右宽度相同时,电机1停止转动。
(4)将步骤2与步骤3写成一个循环程序,循环执行。
(5)当整个机器人走到太阳能板的最右侧的时候,安装在机器人最右侧的光电传感器接收到信号,电机1停止转动。再执行一次步骤3,清洗模块对整个太阳能板的清洗结束,清洗模块返回初始点并停止工作。
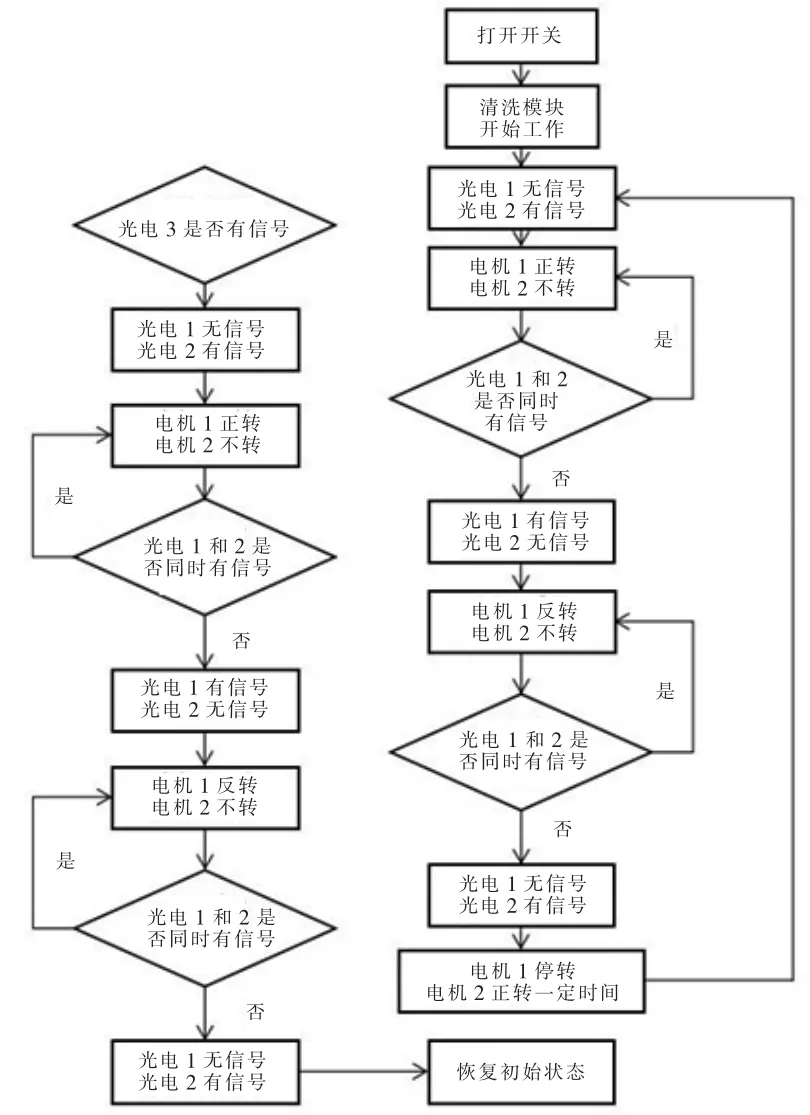
图3 程序流程图Fig.3 Program flow chart
3 材料的选用
太阳能板的表面材质为玻璃,机器人的重量不能太重。行进机构的是基于两个互相垂直的两轴运动来设计的,所以大体的框架多为矩形。考虑以上两点因素,采用2020型材是个非常不错的选择。型材的强度能够保证承受住装置上的重量而不变形,另外型材可以通过角件很方便的搭建想要的结构。
清洗模块想要在机器人内部运作就需要借助移动平台,而平台的移动就要用到滑块与导轨。考虑到框架搭建选用的是2020型材,为了组合安装方便因此选择宽度为28mm的直线导轨。滑块则选择与导轨相配套的内置双轴心滚轮滑块,该滑块上的滑轮并不固定在一条直线上,相互偏置的滚轮方便滑块进出导轨,并且使滑块在导轨内运行更加平稳。另外滑块上带有紧锁装置,能在一些位置对滑块进行固定。
传动带尺寸大小的选择也尽量的和型材、导轨等相近。选择单面齿10mm宽的XL型同步带,另外选择与之相匹配的各种直径的同步轮。
4 结论
经过理论的计算和设计,制作了一个机器人。通过试验证明,设计方案可行,机器人能实现在范围内自由伸缩的功能。经过程序的控制,机器人能按设计的轨迹进行运动。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
上海建材(2021年5期)2021-02-12
船舶标准化工程师(2020年1期)2020-06-12
中国特种设备安全(2019年7期)2019-09-10
中国建筑金属结构(2019年4期)2019-05-15
婚姻与家庭·性情读本(2017年1期)2017-02-16
山东工业技术(2016年15期)2016-12-01
中国塑料(2015年9期)2015-10-14
制造技术与机床(2015年10期)2015-04-09
