光纤陀螺本征频率对准误差引起的零偏漂移抑制方法
2018-10-15 12:09:06石海洋于海成冯文帅郑晓娟
导航与控制 2018年5期
石海洋,于海成,冯文帅,郑晓娟
(北京航天时代光电科技有限公司,北京100094)
0 引言
陀螺仪是惯性系统的核心部件,用于敏感载体相对惯性空间的角运动,测量载体的角位移和角运动。光纤陀螺为全固态结构,结构组成相对简单,没有转动和磨损部件,具有可靠性高、寿命长、动态范围大、启动快等优点,已成为在海、陆、空、天多个领域中广泛使用的主流惯性仪表。陀螺仪按照精度可以分为速率级、战术级、惯性级和精密级。随着光纤陀螺向高精度方向发展,在常温下光纤陀螺的精度水平已经超越惯性级达到精密级,但在环境条件下的精度水平受到众多因素的影响, 与常温下的精度水平相差较大[1⁃4]。光纤环在温度下的伸缩及光纤中光折射率的变化会引起光纤陀螺本征频率变化,最终导致光纤陀螺产生零偏漂移。该漂移对速率级和战术级的低精度光纤陀螺影响较小,但对于高精度光纤陀螺影响不能忽略。因此,对中高精度光纤陀螺温度条件下本征频率与调制频率的对准误差引起的光纤陀螺零偏漂移进行分析研究具有重要意义。
1 本征频率对准误差引起的零偏漂移
1.1 本征频率对准误差对探测器检测信号的影响
光在光纤环中的渡越时间设为τ,则光纤陀螺本征频率fp=1/τ=c/nL。 采用周期为T的方波信号调制的光纤陀螺,调制波形示意图如图1所示。调制波形如图1(a)、 图1(d)所示, 调制信号使干涉光束之间产生的相位差如图1(b)、图1(e)所示,到达探测器的干涉信号可表示为:
式中,P0为零转速下无调制信号状态下到达探测器的光强,ΦS为转速产生的相位差,ΦF为反馈相位,Φb为调制深度。
根据式(1),当ΦS=0时,施加该调制信号到达探测器的干涉信号波形图如图1(c)、 图1(f)所示。 当T>τ或T<τ时, 图1(c)、 图1(f)波形中1、2、3、4、5位置的光强信号比该点相邻位置的光强信号大(持续时间调制信号极性翻转时引起 “尖峰脉冲”,本征频率对准误差和 “尖峰脉冲”持续时间相关,误差越大,持续时间越长。
在环境条件下,由于光纤环长度的伸缩、光纤折射率变化以及陀螺电路产生的调制信号周期的变化均能导致光纤陀螺本征频率与调制频率对准误差产生变化,从而探测器信号中的 “尖峰脉冲”干扰信号发生变化。
1.2 尖锋脉冲持续时间变化对零偏漂移的影响
实际光纤陀螺调制信号由于上升沿和下降沿的不对称性使得方波信号并非完全对称,因而导致调制相位差亦为非完全对称信号,实际调制相位差示意图如图2(a)所示。温度环境下,渡越时间与调制信号周期对准误差使得调制相位差的信号非对称性加剧,其示意图如图2(b)所示。实际光纤陀螺中,由于渡越时间对准误差很小为纳秒量级,且由于调制通道中容性效应的存在,使得图2(b)中的上升和下降过程表现为较平滑状态即相位转换的斜率发生变化。
设非理想方波调制波形中占空比误差为α、上升沿斜率为r、下降沿斜率为f, 一个周期的波形可以表示为[5]:
对式(2)进行 Fourier变换得:
调制信号中的直流分量为:
调制信号中存在的直流成份导致光纤陀螺产生零偏。在温度条件下,光折射率变化率设为Δn/℃, 则温度变化量ΔT℃ 时,光纤陀螺产生零位漂移,如式(5)所示。
式中,D、L分别为光纤环直径和长度,λ、c分别为真空中光束的平均波长和光速。
如图3所示,探测器信号中的 “尖峰脉冲”信号产生 “振铃效应”,对后续的有用信号产生干扰。在温度变化时,采样点位置相对 “尖峰脉冲”信号产生振荡位置发生相对变化,因此光纤陀螺亦会产生零偏漂移。
2 本征频率变化分析
目前,普通晶振在-40℃~+60℃时,温度系数一般在3×10-5左右,对一只普通晶振的频率误差进行测试,测试结果如图4所示。高精度温补晶振目前可以达到1×10-6,对一只温补晶振的频率误差进行测试,测试结果如图5所示。
光纤陀螺中,光纤折射率不变的条件下,光纤陀螺本征频率的变化仅取决于光纤长度的伸缩。光纤环中光纤长度受固化胶、光纤环骨架以及光纤本身膨胀系数的影响,光纤环在温度条件下的伸缩长度不易直接测量。
光在光纤环中的传播时间τ=L/nc(n为光纤环的折射率,c为真空中光速), 因而光纤陀螺本征频率与折射率的变化相关。文献[6]从材料特性出发,指出温度下光纤材料中电子和声子间的相互作用导致对光场的影响,进而影响了光的折射率。在高低温下,采用OTDR测得的光纤环长变化量包含实际光纤环伸缩引起的变化量与折射率引起的变化量两部分[7]。采用OTDR对4只3000m的无骨浸胶光纤环进行测试,测试结果如表1所示。
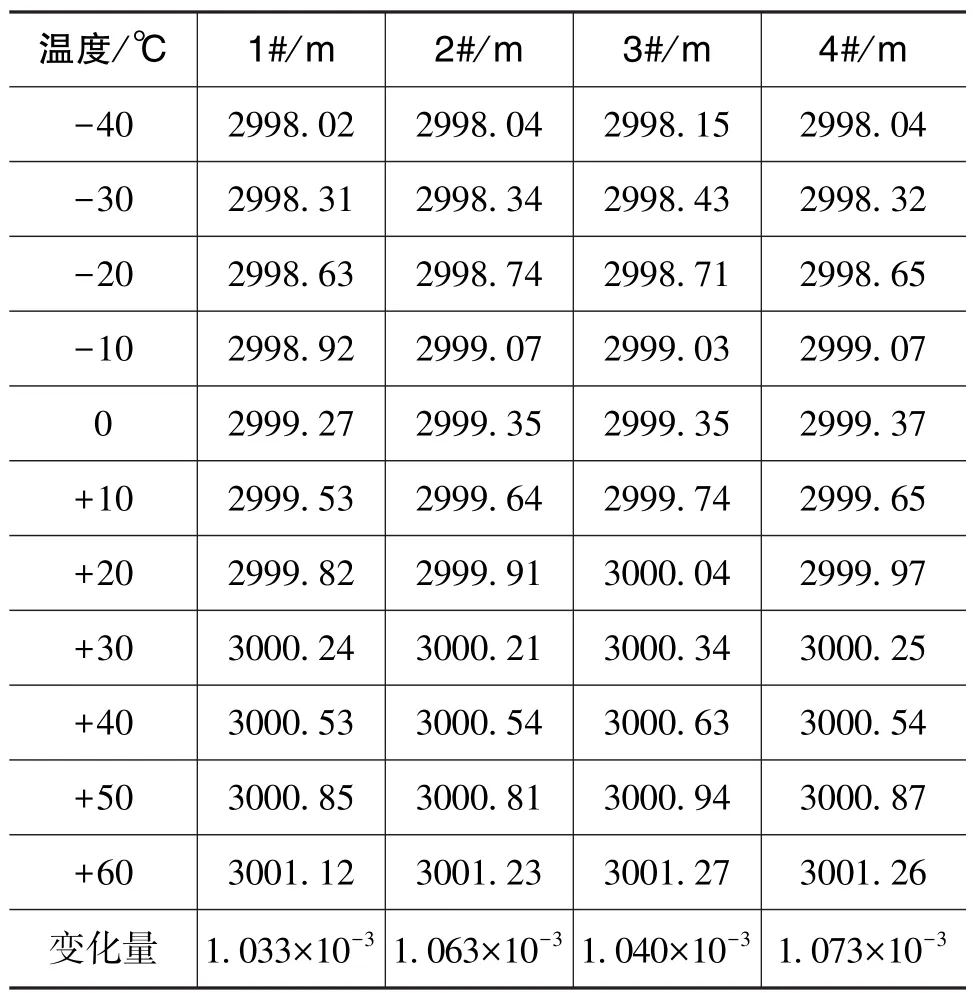
表1 不同温度点下保偏光纤环长度测试结果Table 1 Test results of polarization maintaining fiber ring length at different temperature
3 本征频率对准误差抑制方法
光纤陀螺的本征频率误差由光纤的特性决定,光纤陀螺通过调整调制频率使其与本征频率一致。光纤陀螺调制频率以晶体振荡器为基准,因此温度条件下,通过调整晶体振荡器的输出频率可以实现本征频率与调制频率的对准[8]。
前文已知长度为3000m的光纤环在-40℃~+60℃范围内本征频率变化量约为1×10-3,通过图4和图5可知,普通晶振和温补晶振均不能补偿温度条件下光纤环本征频率的变化量。
压控晶体振荡器的绝对牵引范围(APR)通常小于±1×10-4,MEMS压控振荡器的绝对牵引范围能够达到±1.6×10-3,压控牵引频率线性度小于1%。对某一晶振频率进行测量,测试结果如图6所示。
由图6可知,在控制电压小于0.1V和大于3.2V时,晶振频率进行了极限值保护。因此,采用绝对牵引范围±1.6×10-3的压控振荡器,可有较大余量补偿全温范围内由于温度引起的光纤环本征频率对准误差。
通过调整晶振频率实现调制信号频率与陀螺本征频率对准方案的光纤陀螺原理框图如图7所示。
对光纤陀螺Y波导施加调制电压信号VM(t)(VM(t)对应的调制相位为ϕM(t)),VM(t)由幅值为Vb的方波信号和一个相位延迟为τ/2幅值为Vb1的方波信号叠加而成,且Vb1远小于Vb,其表达式为[9]:
其中,k为整数,Vb、Vb1分别对应的调制相位为ϕb、ϕb1, 且ϕb1远小于ϕb。
由于光纤环渡越时间的存在,调制信号相位差ϕ(t)=ϕM(t)-ϕM(t-τ), 因而当渡越时间与调制周期时间存在对准误差时,则调制相位、调制相位差及干涉光强的关系图如图8所示。当渡越时间τ小于调制周期时间T时,调制相位波形如图8(a)所示, 调制相位差如图8(b)所示, 干涉光强如图8(c)所示。当渡越时间τ大于调制周期时间T时,调制相位波形、调制相位差、干涉光强分别如图 8(d)~图 8(f)所示。

4 实验结果及讨论
调制波形的不对称度是由电路中电子元器件的容性效应等相关参数导致的上升沿、下降沿变化等因素引起,调制波形的不对称度随调制波形的频率减小而成比例地减小。取光纤长度为1000m陀螺调制波形的不对称度为10-3,光纤折射率随温度变化率为10-5/℃,光波长1550nm,对光纤环直径为80cm,长度分别为1000m和2000m的光纤陀螺温度下本征频率对准误差引起的陀螺零偏漂移进行仿真,其结果如图9所示。
为了验证消除光纤陀螺本征频率与调制频率准误差抑制光纤陀螺温度下零偏漂移的有效性,研究采用一只环长2000m的高精度光纤陀螺,改进前采用的是普通晶振,改进后采用压控晶振并使用本文提出的调制方法。实验过程中,在-40℃、 -20℃、 0℃、 +20℃、 +40℃、 +60℃下分别保温1h后通电测试,改进前后光纤陀螺的零偏输出波形分别如图10和图11所示,各温度点下陀螺零偏均值测试结果如表2所示[10]。

表2 高低温固定温度点下改进前后光纤陀螺输出零偏Table 2 Bias of FOG before and after improved respectively,at fixed temperature points
通过上述测试结果可以看出,采用本征频率对准误差抑制方法后,光纤陀螺在-40℃~+60℃范围内, 零偏极差从 0.119(°)/h 减少至 0.047(°)/h, 测试结果证实该方法可以有效抑制本征频率对准误差引起的零偏漂移。
5 结论
通过分析光纤环在温度下的膨胀系数和折射率变化引起的光纤陀螺本征频率误差以及光纤陀螺本征频率与调制频率对准误差引起的零偏漂移,提出了一种光纤陀螺高低温下调制频率自动跟踪本征频率的方法。根据光纤陀螺干涉信号的特性设计了调制波形,通过对本征频率与调制频率对准误差引起的相位差进行解调以控制光纤陀螺晶振的频率,从而抑制了高低温下本征频率对准误差引起的光纤陀螺零偏漂移,测试结果表明采用该抑制方法的光纤陀螺高低温固定温度点下的零偏漂移减小了50%。
猜你喜欢
家庭影院技术(2020年1期)2020-06-24 05:59:20
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
家庭影院技术(2019年4期)2019-04-17 05:12:56
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
家庭影院技术(2018年9期)2018-11-02 05:31:36
当代陕西(2018年12期)2018-08-04 05:49:20
快乐语文(2018年36期)2018-03-12 00:56:02
电子制作(2017年13期)2017-12-15 09:00:11
中国惯性技术学报(2017年1期)2017-06-09 08:15:14