
基于智能视觉的微型高精度图像采集系统设计
2018-10-12 05:48马玉芳
现代电子技术 2018年19期
马玉芳
摘 要: 为了解决图像采集效果差的问题,提出基于智能视觉的微型高精度图像采集系统设计。在智能视觉技术中,需利用传感器提供的实时构造闭环反馈信息对摄像机产生的视频信号进行处理,转换成数字图像信息,实时对信息进行采集,并对采集器接口和传感器接口进行设计;对系统软件部分设计时,需对系统进行初始化处理,实现数据输出、键盘显示与报警控制等功能,对时序智能视觉原理展开分析,并对解差分进行设计。通过实验证明,该系统采集效果较好,系统可靠性较强。
关键词: 智能视觉; 图像采集系统; 数字信息; 初始化处理; 接口设计; 信号处理
中图分类号: TN02?34; TP24 文献标识码: A 文章编号: 1004?373X(2018)19?0067?04
Abstract: The design of micro high?precision image acquisition system based on intelligent vision is proposed to improve the acquisition effect of the traditional image acquisition system. In the intelligent vision technology, the real?time closed?loop feedback information provided by sensors is utilized to process the video signal generated by the camera, converted it into the digital image information, and acquire the information in real?time. The interfaces of collector and sensor are designed. In the system software design, it is necessary to initialize the system to realize the functions of data output, keyboard display and alarm control, the theory of time?series intelligent vision is analyzed, and the solutions of difference are designed. The experimental results prove that the system has perfect acquisition effect, and high system reliability.
Keywords: intelligent vision; image acquisition system; digital information; initialization processing; interface design; signal processing
0 引 言
随着科学技术的快速发展,人们对图像采集系统的需求也日益增加,尤其是图像传感器因其体积小、功耗低的优点成为了数字成像领域炽手可热的采集器件之一。目前图像采集器集成的转换电路一般为8 bit,这样的精准度可满足一般图像成像原理,但如果应用系统对图像采集精准度要求较高时,由于传统采集系统存在采集效果差的问题就显得力不从心[1]。为此,根据实际指标,需采集更高精度的图像,为此本文提出基于智能视觉的微型高精度图像采集系统设计。
设计以智能视觉采集芯片为主控系统,结合微型高精度LM98640实现对图像传感器信号的采集。在智能视觉技术中,需利用传感器提供的实时构造闭环反馈信息对摄像机产生的视频信号进行处理,实时对信息进行采集,并对采集器接口和传感器接口进行设计;对系统软件部分设计时,需对系统进行初始化处理,实现数据输出、键盘显示与报警控制等功能,并重点研究时序设计和后续图像信号采集处理,同时给出相关时序设计仿真波形,由此呈现出实际成像效果。通过实验结果证明,该系统图像采集效果良好。
1 图像采集基于智能视觉系统硬件结构设计
智能视觉采集器作为外部传感器可在无接触情况下对外部信息进行解析,由此在智能控制系统中获得越来越多的应用机会。在智能视觉技术中,需利用传感器提供的实时构造闭环反馈信息对摄像机产生的视频信号进行处理,转换成数字图像信息,并实时对信息进行采集[2]。根据图像所达到的分辨率与灰度级对微型高精度图像采集结构框架进行设计,如图1所示。
由图1可知,图像采集系统硬件结构框图设计的作用是将图像信号转化为数字信号,并通过图像传感器将采集到的数据存储在系统中,并实时传输。该框架由图像采集器、传感器、视频解码器、逻辑控制器以及外围电路组成。
1.1 采集器接口电路设计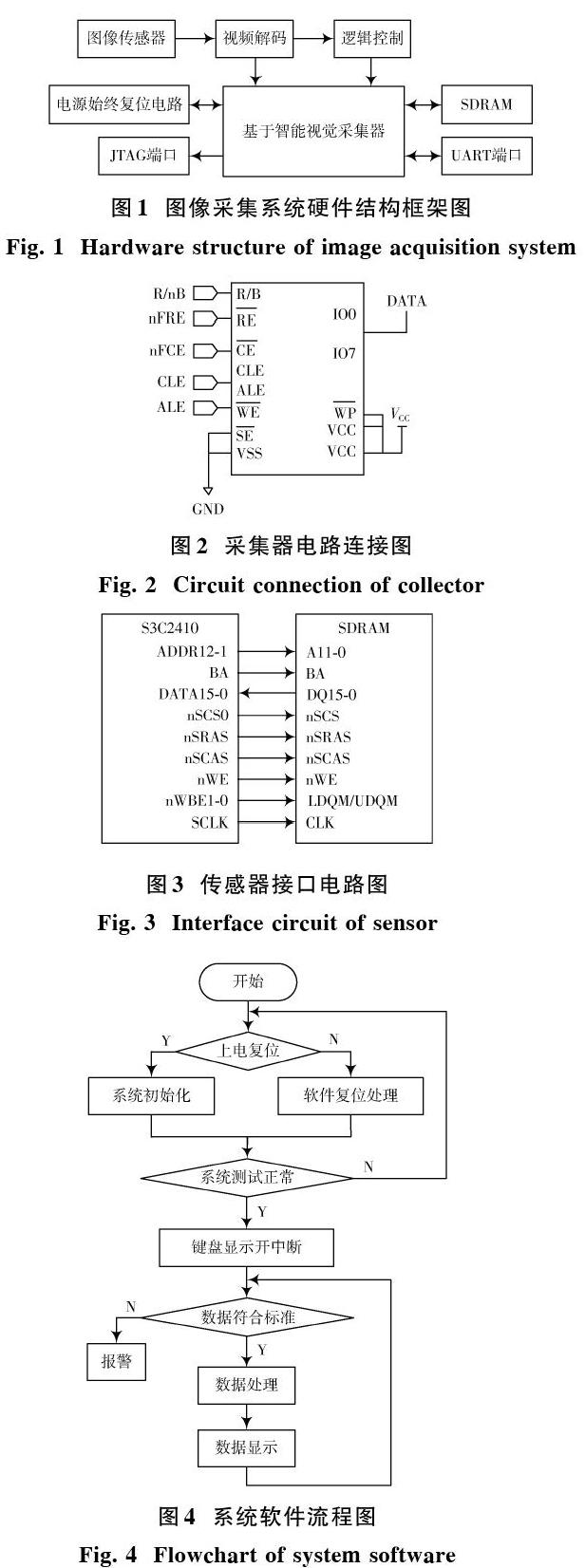
采集器是一种可在系統程序中直接对电路传输信息进行采集的器件,具有功率低、容量大、传输速度快,可直接在系统中进行编程等特点,作为一种非易失性的采集器,在系统中应存放程序代码和常量来表示系统用电后续保存的关键数据[3]。通常用8位或16位的数据表示编程电压,而采集器芯片内部在执行时,过程比较复杂,价格昂贵,但是传输效率较高,可在1~3 MB的小容量中具有较高成本效益。
为了支持系统引导操作,在采集芯片S3C2410A上具备静态随机存取存储(SRAM)缓冲器内部结构[4]。当系统启动时,存储器前面的4 000字节将自动载入引导代码中,在正常情况下,这4 000字节引导代码需将程序内容拷贝到存取存储(SRAM)缓冲器内部结构中,以便后续完成内容拷贝引导代码跳转。使用S3C2410A内部硬件智能视觉功能可对采集到的数据进行有效检验。在系统设计中利用启动程序,选择K9F1208芯片作为图像数据存储器,由于K9F1208芯片容量大、可靠性强,可为存储器提供64M×8位的容量,除此之外还具有较大空闲存储区[5]。
K9F1208芯片对612字节一页的操作程序所花费的时间是200 ms,且对20 000字节的用电擦除操作仅仅需要2 s。设置16位I/O端口地址、数据和复用命令的方法可减少引脚数目,并使接口电路变得更加简洁,不需要特意保护,为此设计的采集器电路图如图2所示。
1.2 基于智能视觉传感器接口
利用智能视觉分析技术对采集系统传感器接口进行设计,使用电数据能够长久保存到系统中,与闪存器件不同之处是其随机读写速度较快,并不需要擦除。静态随机存取存储(SRAM)缓冲器在系统设计中可用作程序空间数据,具有空间单位存储容量大、价格便宜的优点,其内部存储单元可视为一个电容,倾向于放电,避免数据丢失,需定时刷新[6]。基于此,在系统设计中设计缓冲器可随时刷新控制逻辑,并在系统中增加刷新控制逻辑芯片,可与缓冲器接口直接对接,此时只需对存储器相关组件进行适当调整即可实现。
目前,最常用的是8位或16位的数据宽度静态随机存取存储(SRAM)缓冲器,工作电压一般为3.0 V,系统采用容量为32 MB的K4S561632C芯片,如图3所示。
2 基于智能视觉采集系统软件部分设计
对系统软件部分设计时,需对系统进行初始化处理,实现数据输出、键盘显示与报警控制等功能,程序流程如图4所示。
由图4可知,键盘可显示服务中断程序,并完成相应参数测量的输入与显示,并实现报警控制功能,将数据进行同步处理可中断服务程序,包括数据采集的实时处理和计算。
2.1 时序智能视觉原理分析
对时序智能视觉原理的分析实质上就是对配置寄存器的分析[7]。首先将SEN配置降低,然后发送指令,其中一条指令由8 bit串行数据组成,第一个比特为读写控制命令,第二个比特为器件地址,一般都设置为0,剩下的6个比特为寄存器地址,将这8 bit直接写入寄存器中,每一个比特的命令写入都在SCLK上进行[8]。图5描述了图像成像时所需的40个寄存器配置时序仿真波形。
由图5可知,寄存器初始值写成0X04,按照器件手册可设计出完全满足设计的需求。配置完寄存器后,按照设计流程对图像信息进行采集,为此设计默认保持模式,并采用2条线路和4个通道对数据输出。将14 bit并行数据在这2条线路上进行输出,其中1条为13~7 bit,另1条为6~0 bit,每1条线路的输出都是对TXFRAME信号转化[9?10]。奇数像元TXFRAME信号的宽度为3个时钟,偶数像元的TXFRAME宽度为2个时钟,利用输出信号的4个通道进行差分信号的传送,并分别标识,这些信号由格式和速率组成,不能直接进行应用,为此将这些信号全部输入存储器中等待后续处理。
2.2 解差分设计
图像采集器对信号的解差分设计通常有两种,分别是使用数据处理专用的接收芯片和选用支持差分信号的FPGA。后果省去接收芯片,进而减小采集系统体积,为了方便不同种类发送装置的检测与维护,构建兼容智能视觉检测平台,可节省重量方面的考虑[11],使用兼容性较好的接口,可使系统设置和相应接口进行完美连接,使用起来也比较方便,并在约束文件里定义信号属性,即可完成信号的接收。由此可知,解差分后需将时钟放置在全局总线上,才可对图像数据进行准确采集。
3 仿真实验
为了验证基于智能视觉的微型高精度图像采集系统设计的合理性,对系统进行仿真测试。
3.1 实验环境与过程设计
平台选用Proteus仿真软件进行实验,该软件是基于仿真引擎设计的混合仿真电路,不仅能够模仿数字电路和混合电路,还能模仿具有特色的单片机电子系统。采用Proteus仿真平台的实验环境,由于缺少图像传感器,为此,需要加载外在信号源来测试整个系统图像数据采集的可靠性。
具体实验步骤如下:
1) 首先在仿真软件平台上构建与实验方案一致的仿真模型;
2) 在单片机上编制程序,并在集成开发环境下调试与编译,由此生成“.HEX”图像文件;
3) 运行模拟仿真软件,打开编制好的仿真电路,在程序中加载编译“.HEX”图像文件,然后选择“确认”就可进行仿真实验;
4) 利用虚拟传感器对图像数据进行采集,或者构建显示终端的虚拟结构,进而显示采集到的数据,促使仿真程序变得更加复杂化,为了使数据显示的更加直观,采用正弦信号发生器作为外在数据信号源,如果图像采集能够顺利实现,那么需要系统输出正弦型的波形,并通过设置显示器观察通信效果。
3.2 实验结果与分析
为了使测试结果更加具有可靠性,将传统系统与本文设计的图像采集系统进行对比,结果如图6所示。
图6中横坐标表示采集时间,纵坐标表示采集到的图像数据。由于在采样系统中对频率需求较高,为此数据量偏大,由图可知本文设计系统图像采集数据呈现的是正弦型曲线,而传统系统不具有该属性,为此本文设计系统针对图像采集符合实际要求,可行性较强。
另一方面,可从系统时序仿真波形角度对传统系统与本文系统设计的合理性进行对比,结果如图7所示。
由图7可知,本文设计的系统可清晰地看到边缘,层次感设计分明,可充分验证设计的有效性。
3.3 实验结论
根据上述实验内容,得出实验结论:由于在采样系统中对时序频率需求较高,为此数据量偏大,通过对比实验可知,本文设计系统图像采集数据呈现的是正弦型曲线,而传统系统不具有该属性,而且时序仿真波形不清晰、层次感较差,由此可知,本文设计的图像采集系统图像采集效果较好。
4 結 语
本文完成了采用智能视觉技术实现微型高精度图像采集系统的设计,其信号采集与存储十分灵活,同时可改善传统系统存在的缺陷,进而提高了系统设计的合理性。该系统设计虽然是在传统系统基础上研发的,但是采用时序仿真波形的方式设计图像采集系统,只需稍加修改即可适用于其他应用系统,具有良好的通用性。
参考文献
[1] 王强.基于视觉传感网络的目标跟踪系统设计[J].现代电子技术,2016,39(8):88?91.
WANG Qiang. Design of target tracking system based on visual sensing network [J]. Modern electronics technique, 2016, 39(8): 88?91.
[2] 王炳强,刘娜,刘冲.烟火场区域的人员智能视觉分析系统设计[J].现代电子技术,2016,39(16):128?131.
WANG Bingqiang, LIU Na, LIU Chong. Design of intelligent vision analysis system to locate persons in fireground area [J]. Modern electronics technique, 2016, 39(16): 128?131.
[3] 陈熔,刘杰.基于智能视觉的特定人员检索平台设计与实现[J].现代电子技术,2017,40(14):102?105.
CHEN Rong, LIU Jie. Design and implementation of specific staff retrieval platform based on intelligent vision [J]. Modern electronics technique, 2017, 40(14): 102?105.
[4] 李超,吕宪伟,涂文俊,等.基于计算机视觉的实木表面智能化分选系统设计[J].北京林业大学学报,2016,38(3):102?109.
LI Chao, L? Xianwei, TU Wenjun, et al. Design of an intelligent wood surface grading system based on computer vision [J]. Journal of Beijing Forestry University, 2016, 38(3): 102?109.
[5] 曾文兵,张国平.基于Cotex?M4内核的实时图像采集系统[J].电子设计工程,2017,25(14):175?178.
ZENG Wenbing, ZHANG Guoping. A real?time image acquisition system based on Cotex?M4 kernel [J]. Electronic design engineering, 2017, 25(14): 175?178.
[6] 王盛,田江.基于智能视觉的学生考试异常状态识别系统设计与实现[J].现代电子技术,2017,40(14):78?80.
WANG Sheng, TIAN Jiang. Design and implementation of intelligent vision based recognition system for student′s examination abnormal status [J]. Modern electronics technique, 2017, 40(14): 78?80.
[7] 王飞,杜文华,关波,等.基于视觉的刀具参数高精度测量[J].计算机工程与设计,2015,36(2):524?528.
WANG Fei, DU Wenhua, GUAN Bo, et al. High precision measurement of cutting tool parameters based on vision [J]. Computer engineering and design, 2015, 36(2): 524?528.
[8] 李和香.基于物联网视觉的旅游景区异常情况图像自动识别系统设计[J].现代电子技术,2017,40(4):124?127.
LI Hexiang. Design of IoT vision based image automatic identification system for tourist attraction abnormalities [J]. Modern electronics technique, 2017, 40(4): 124?127.
[9] SONG Guicai, WANG Jinghua. Architectural space rationality analysis based on intelligent vision [J]. Modern electronics technique, 2017, 40(16): 102?104.
[10] LI Kexin. Design and implementation for fast visual positio?ning system of vehicle causing traffic accident [J]. Modern electronics technique, 2015, 451(20): 63?66.
[11] ZHANG Bin, SU Jingxiao, ZHANG Weiwei, et al. Design for apple?picking robot of intelligent recognition based on laser vision [J]. Journal of agricultural mechanization research, 2016, 38(7): 60?64.
猜你喜欢
土木建筑工程信息技术(2020年4期)2020-12-16
水利科技与经济(2020年1期)2020-03-31
心理学报(2019年7期)2019-07-06
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年9期)2018-07-26
信号处理(2018年9期)2018-07-26
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
图书馆论坛(2014年9期)2014-03-11
