
自主跟踪行李箱的超声波测控系统的实验教学设计与开发
2018-10-11 11:59马金玉马凤鸣谢东晖马彦青
实验技术与管理 2018年9期
马金玉, 张 涛, 马凤鸣, 谢东晖, 马彦青
(1. 天津大学 精密仪器与光电子工程学院, 精密测试技术及仪器国家重点实验室, 天津 300072; 2. 天津市计量监督检测科学研究院, 天津 300072)
目前的自动跟踪行李箱有视觉、GPS和回声探测等方法。视觉法软硬件开销大、成本高、对照明有要求,GPS在室外效果较好,回声探测距离短、辨识度弱[1-3]。设计和实现一套以应答式超声波定位为基础、能够自动跟踪声源目标的行李箱测量与控制系统,可以弥补上述不足。涉及的知识和技能:数学建模与误差分析;功率放大、信号调理、模拟滤波器、精密解调电路设计;采样定理、欠采样的理解和应用,数字滤波器设计,通过分析系统响应优化激励信号;电机驱动与反馈控制;嵌入式系统设计,包括需求分析与资源分配及模数转换、定时计数器、总线等的运用;计算机辅助设计和仿真应用。
该实验锻炼学生分析和解决工程问题能力,应用电路、信号处理、嵌入式系统设计等专业知识,和数学、声学等基本原理,识别、分解和表达复杂工程问题。通过文献、器件、工艺、价格等调查研究,以及灵活使用多种资源、工具,进行预测、模拟、优化、验证,设计和开发出合理、可行的解决方案,并能体现创新意识。
1 项目设计思想
超声波测控系统的工作流程如图1所示,其中行李箱上安装1个发射器和2个接收器,类似于双耳系统;目标上安装超声波应答器。每次定位时,首先由行李箱发射询问超声脉冲,当目标的应答器识别到询问信号时,发回应答信号,行李箱接收应答信号,通过对应答信号进行软件和硬件方面的处理实现对目标的定位、跟随。其中,利用耳间强度差和相位差测量目标方位角,利用回波的时延测量距离。

图1 超声波测控系统的工作流程
1.1 测量原理
如图2所示,测量包括方位角测量和距离测量。当目标在远场时,由于双耳的幅度差不明显,可利用双耳相位差Δφ、声波波长λ和两耳间距2r计算目标方位角θ;当目标在近场时,由于双耳的相位差不再满足简化条件,相位差和方位角的关系变得复杂,而幅度比较大、幅度差随方位角变化比较灵敏,可采用双耳强度差测量目标方位角[4-8]。距离d测量依靠询问脉冲和应答脉冲的时延Δt和声速c计算,该时延还需减去应答器的反应滞后时间。
1.2 系统结构
如图3所示,系统包括传感器、信号调理、处理器、电机控制与驱动、电源模块等几部分。其中传感器模块的超声波应答器位于目标上,其余部分在行李箱上。

图2 定位原理
脉冲发生器产生单频脉冲,经过功率放大器,激励超声询问器,超声应答器的回波返给超声询问器,回波信号进入滤波放大电路。对滤波放大信号有3种方案可以实现方位与距离测量:既可以采用全软件的方式,如DSP过采样高速采样和信号处理或者单片机欠采样低速采样和信号处理;也可以采用硬件+软件混合的方式,即检波之后通过单片机的超低速采样和信号处理;还可以采用全硬件的方式,如精密检波电路、数字整形,利用单片机的计数器测量相位差和包络宽度差(对应幅度差)实现幅值和相位的测量。
系统根据方位角和距离,通过PID控制,完成电机驱动与控制,最终实现目标跟踪功能。
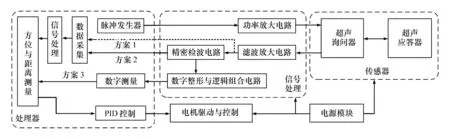
图3 系统结构
1.3 运动控制
跟随目标的运动控制技术路线如图4所示。首先测量方位角和距离相对于设定值的偏差,按照图4所示的策略对行李箱的姿态、速度进行实时调整。跟踪策略为:当距离d变大时,2轮同时加速,反之,2轮同时减速;当方位角偏右时,左轮速度变大;反之,方位角偏左时,右轮速度变大。行李箱的驱动可以采用步进电机也可以采用直流电机,功率放大器件全部采用主流的专用集成芯片。对于采用了有速度反馈的电机,可以对运动控制的偏差、滞后性、平滑性提出更加具体的指标要求。
2 教学实施进展
教学过程采用CDIO-OBE教学理念[9-12],启发式、探究式和讨论式相结合,以学生为本,把单声道课堂变成双声道课堂,把教师教变成学生学,注重培养学生的创新能力、发现问题解决问题的能力、自主学习实践能力、团队能力和表达沟通能力(见表1)。
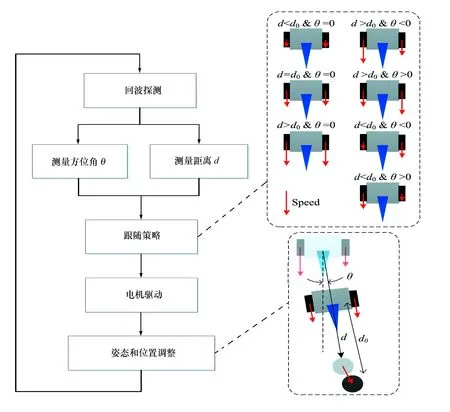
图4 目标跟随控制技术路线
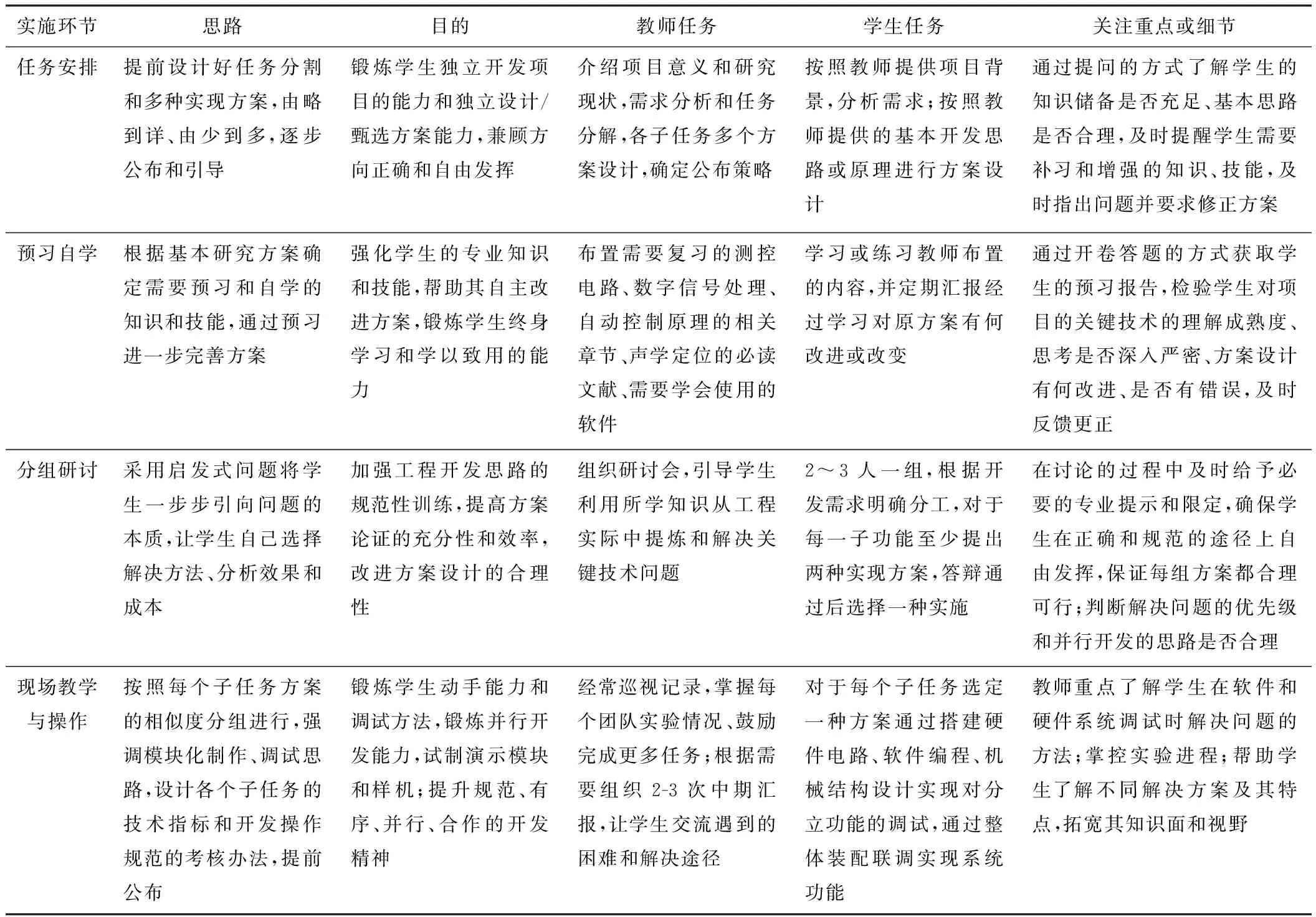
实施环节思路目的教师任务学生任务关注重点或细节任务安排提前设计好任务分割和多种实现方案,由略到详、由少到多,逐步公布和引导锻炼学生独立开发项目的能力和独立设计/甄选方案能力,兼顾方向正确和自由发挥介绍项目意义和研究现状,需求分析和任务分解,各子任务多个方案设计,确定公布策略按照教师提供项目背景,分析需求;按照教师提供的基本开发思路或原理进行方案设计通过提问的方式了解学生的知识储备是否充足、基本思路是否合理,及时提醒学生需要补习和增强的知识、技能,及时指出问题并要求修正方案预习自学根据基本研究方案确定需要预习和自学的知识和技能,通过预习进一步完善方案强化学生的专业知识和技能,帮助其自主改进方案,锻炼学生终身学习和学以致用的能力布置需要复习的测控电路、数字信号处理、自动控制原理的相关章节、声学定位的必读文献、需要学会使用的软件学习或练习教师布置的内容,并定期汇报经过学习对原方案有何改进或改变通过开卷答题的方式获取学生的预习报告,检验学生对项目的关键技术的理解成熟度、思考是否深入严密、方案设计有何改进、是否有错误,及时反馈更正分组研讨采用启发式问题将学生一步步引向问题的本质,让学生自己选择解决方法、分析效果和成本加强工程开发思路的规范性训练,提高方案论证的充分性和效率,改进方案设计的合理性组织研讨会,引导学生利用所学知识从工程实际中提炼和解决关键技术问题2~3人一组,根据开发需求明确分工,对于每一子功能至少提出两种实现方案,答辩通过后选择一种实施在讨论的过程中及时给予必要的专业提示和限定,确保学生在正确和规范的途径上自由发挥,保证每组方案都合理可行;判断解决问题的优先级和并行开发的思路是否合理现场教学与操作按照每个子任务方案的相似度分组进行,强调模块化制作、调试思路,设计各个子任务的技术指标和开发操作规范的考核办法,提前公布锻炼学生动手能力和调试方法,锻炼并行开发能力,试制演示模块和样机;提升规范、有序、并行、合作的开发精神经常巡视记录,掌握每个团队实验情况、鼓励完成更多任务;根据需要组织2-3次中期汇报,让学生交流遇到的困难和解决途径对于每个子任务选定一种方案通过搭建硬件电路、软件编程、机械结构设计实现对分立功能的调试,通过整体装配联调实现系统功能教师重点了解学生在软件和硬件系统调试时解决问题的方法;掌控实验进程;帮助学生了解不同解决方案及其特点,拓宽其知识面和视野

表1(续)
3 考核评价内容与方式
3.1 考核内容
考核内容与方式,整体分为4大块,分别是学生的前期准备质量、项目开发的性价比、任务完成情况和结题报告质量。
(1) 前期准备质量,占比30%。方案设计合理、论证充分及结论、理论推导正确,材料预算细致精确及人员分工、答辩情况。
(2) 项目开发的性价比,占比15%。焊接质量、装配牢固、外观美观、成本、有无安全隐患、是否充分应用了计算机辅助及仿真技术。
(3) 任务完成情况,占比40%。完成数目和程度,实现或达到的技术指标、演示成功、可重复。
(4) 结题报告,占比15%。电路与程序调试方案、过程、结果,实验数据记录与处理分析,实验照片及说明,成本核算、器件清单及损耗程度,改进计划,答辩情况。
3.2 考查系统功能
任务功能完成情况通过3个层次的技术指标或功能演示进行考核。
3.2.1 基础功能
(1) 对目标定位更新率大于10 S/s;
(2) 以数字方式显示目标位置;
(3) 探测距离不低于6 m、精度不低于0.2 m,方位角测量精度优于±3°;
(4) 能够随着目标的移动而移动和转弯。
3.2.2 扩展功能
(1) 具备回声探测和规避障碍物的功能;
(2) 具备在使用者旁边同步前进的功能;
(3) 具备近远场定向测量自适应切换功能。
3.2.3 提高功能
(1) 能够在多个目标中识别和跟踪单个目标;
(2) 具备近远场探测脉冲长度自动调节功能。
4 结语
采用应答式在原理上保证了测量精度,又增加了系统复杂度和拓展性,将学生的精力更多地聚焦到系统的优化实施、专业知识的学以致用等方面。通过外围电路和处理器的开放式配置,实现测量任务在软硬件之间灵活切换,充分体现了知识应用的综合性和实现方法的多样性。 实验内容针对实际的社会、工程需求,让学生在“用中学”“用中研”,采用主流技术,如DSP,规范开发标准,技术起点高。
猜你喜欢
好日子(2022年3期)2022-06-01
空间科学学报(2020年4期)2020-04-22
童话世界(2019年32期)2019-11-26
睿士(2019年12期)2019-09-10
疯狂英语·新读写(2018年2期)2018-09-07
陕西画报(2018年6期)2018-02-25
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
英语学习(2016年1期)2016-09-10
河南科技(2015年18期)2015-11-25
城市勘测(2013年5期)2013-03-06
