
探地雷达混凝土空洞目标正演模拟与试验分析
2018-10-11 12:28:44凌同华刘浩然
交通科学与工程 2018年3期
陈 婕, 凌同华, 刘浩然, 杨 宇
(长沙理工大学 土木工程学院,湖南 长沙 410114)
在隧道施工的过程中,由于地质条件复杂,衬砌可能出现空洞和渗水的现象,甚至出现塌方和衬砌结构腐蚀,对工程安全造成了严重的影响,因此,必须对隧道衬砌进行检测[1-2]。早期的钻孔检测法会对隧道造成损伤,且不能对衬砌进行大范围的检测,只能抽样检测,导致钻孔检测法不适用于如今的隧道检测。20个世纪90年代,探地雷达(ground penetrating radar,简称为GPR)迅速发展,以它为代表的无损检测手段也在隧道检测工程中大放异彩[3-4]。探地雷达是利用天线发射和接收高频电磁波来探测介质内部物质特性和分布规律的一种地球物理方法。作为一种无损检测手段,其高效和高分辨率的优势已经在实际工程项目中广泛应用[5-6]。探地雷达已成为隧道检测的首选技术手段。然而,由于地质条件复杂、空洞形态的差异较大,在实际探测中对目标的检测和识别仍然存在着一些难题。对于探地雷达图像的解释还没有一个客观的标准,仍依赖工程师的工程经验,而不同的人对同一个图像的解释结果也会存在着一些差异[7]。本研究拟借助计算机软件,对雷达探测进行模拟,以期发现探地雷达在对空洞进行检测时的规律和特点,为提高探地雷达的检测效果提供依据。
1 探地雷达的基本原理
1.1 探地雷达的组成
探地雷达的探测系统包括发射天线、接收天线、控制收发和数据存储的控制系统及计算机。通过这些系统之间的分工与合作,共同完成数据采集任务。
控制和处理单元是探地雷达系统的主机。它的主要功能是控制发射天线和接收天线,实现数据的测量和采集,以及通过自带显示器或者计算机来选取参数和显示雷达图像,还可以对图像和数据进行存储和初步处理。发射天线在接到控制单元发出的指令后会产生特定频率的电信号,电信号经发射天线转换为电磁波信号并发射出来,而接受天线则负责接受目标反射的电磁波信号,并转换成电信号进行存储。计算机通过控制单元与雷达系统相连,采集数据后,可以对原始数据进行进一步的处理。
1.2 探地雷达的工作原理
探地雷达利用主频为数十兆赫兹至上千兆赫兹的高频电磁波,以高频带段脉冲的形式由发射天线向地下发射,由于不同材质的介电特性存在着差异,当探底雷达发射的高频电磁波遇到不同介电特性的介质时,会发生反射、折射及衍射。反射的电磁波被接收天线所接收,经过信号处理和数据分析形成雷达波的反射图像。根据反射波的波形特征和振幅等情况,可以推测出地下介质的分布情况和属性。
1.3 探地雷达的优越性
探地雷达采用高频脉冲电磁波进行探测,其探测结果有较高的分辨率。探地雷达工作时,采样和接收时间很短,探测速度快、效率高,并且不会对检测介质造成损伤,其探测结果能直观地反映地下介质的变化规律。
1.4 探地雷达的局限性
探地雷达发射的高频电磁波在传播过程中会出现衰减现象,不同频率的电磁波衰减程度不同,高频电磁波的衰减程度比低频电磁波的衰减程度更为严重。这一现象会降低雷达的探测精度,且雷达实际探测过程中易受到环境的影响,如:噪音会对雷达的探测造成干扰,空气湿度和土壤的含水率等都会影响到雷达的探测结果。
2 麦克斯韦方程组与时域有限差分法
2.1 麦克斯韦方程组
麦克斯韦方程组是英国物理学家麦克斯韦在19世纪建立的一组描述电场、磁场与电荷密度、电流密度之间关系的偏微分方程[8],其表达式为:
(1)

2.2 时域有限差分
时域有限差分(finite-difference time-domain,简称为FDTD)是1966年由Yee[9]提出的一种电磁场数值计算方法。在电磁场中,每一个电场(或磁场)分量周围有4个磁场(或电场)分量环绕,它对电场和磁场分量在空间和时间上采取交替抽样的离散方式。应用该离散方式把含有时间变量的麦克斯韦旋度方程转化成一组差分方程,并在时间轴上逐步推进地求解空间电磁场[10]。Yee提出的这种抽样方式后来被称为Yee元细胞,如图1所示。

图1 FDTD算法空间Yee网格Fig. 1 Yee space grid of FDTD algorithm
FDTD算法是有稳定条件的数值方法,它的稳定条件由CFL(courant,freidrichs,lewy)条件确定,需要满足:
(2)
式中:c为光速;Δx,Δy和Δz分别为X,Y和Z方向的步长;Δt为时间步长。
在FDTD计算中,除了要满足稳定性条件外,还需要考虑到数值色散在模拟过程中引起的脉冲波畸变和虚假折射现象,而色散的误差与网格的步长有直接关系,因此,时间步长和空间步长需要满足:
(3)
式中:λ为波长;T为周期。
3 空洞模型及正演模拟
3.1 GprMax3.0
GprMax3.0是由Giannopoulos教授研究开发的,以时域有限差分为基础的一个模拟电磁波传播的开源软件。它利用时域有限差分的Yee元细胞求解三维麦克斯韦方程组[11-12]。
使用GprMax3.0进行探地雷达正演模拟时,最重要的一步就是编辑输入文件。先需要使用基本命令对空间的大小、空间步长及时间步长进行定义,其中,空间步长和时间步长需要满足稳定性条件和数值色散要求。然后再对介质材料的参数进行设置,确定发射源的种类、频率和位置以及接收器的位置。还需要使用对象构造命令,对空间中的特定位置进行介质填充。
编辑好输入文件后,输入指令即可运行程序进行计算,并得到该模型的A扫描(A-Scan)和B扫描(B-Scan)图像。GprMax正演模拟流程如图2所示。
3.2 空洞模型设计
该模型整体区域宽2.0 m,深1.2 m,材料为混凝土,其介电常数ε1=6,电导率σ1=0.01 S/m, 相对磁导率为1。根据稳定性条件和数值色散要求,确定空间步长Δx=Δy=0.01 m。

图2 GprMax正演模拟流程Fig. 2 Flowchart the forward simulation by GprMax
本试验做2组单一变量对比模拟:第1组对2个不同形状的空洞进行数值模拟,一个是圆形空洞,另一个是方形空洞;第2组的研究对象分别是一个充满水的空洞和另一个一半水一半空气的空洞。总计4个空洞模型。
模型1为一个圆形空洞,里面充满空气,空洞顶点距模型表面0.2 m,半径0.1 m;模型2为一个边长为0.2 m的正方形空洞,里面充满空气,上表面埋深为0.2 m;模型1和模型2的激励源是频率为800 MHz的雷克子波,发射天线起点位置为(0.5,1.0),接收天线起点位置为(0.6,1.0),天线移动步长为0.01 m,采集道数100,时间窗为14×10-9s。模型3为一个圆形空洞,里面充满水,半径0.1 m,圆心距模型表面0.4 m;模型4为一个圆形空洞,里面一半是水一半是空气,半径0.1 m,圆心距离模型表面0.4 m。模型3和模型4的时间窗为28×10-9s,激励源是频率为400 MHz的雷克子波,发射天线起点位置为(0.5,1.0),接收天线起点位置为(0.6,1.0),天线移动步长为0.01 m,采集道数100。这4个空洞模型如图3所示。
3.3 GprMax3.0正演模拟
将模型的所有参数保存至输入文件中,由于GprMax3.0并没有用户交互界面,需要通过DOS命令把输入文件导入GprMax软件进行运算,计算正演模拟的结果(后缀为.out的输出文件),再通过matplotlib模块读取输出文件,得到正演模拟的A扫描和B扫描图像,4个模型的A扫描图像如图4所示,B扫描图像如图5所示。

图3 空洞模型示意Fig. 3 GPR image model
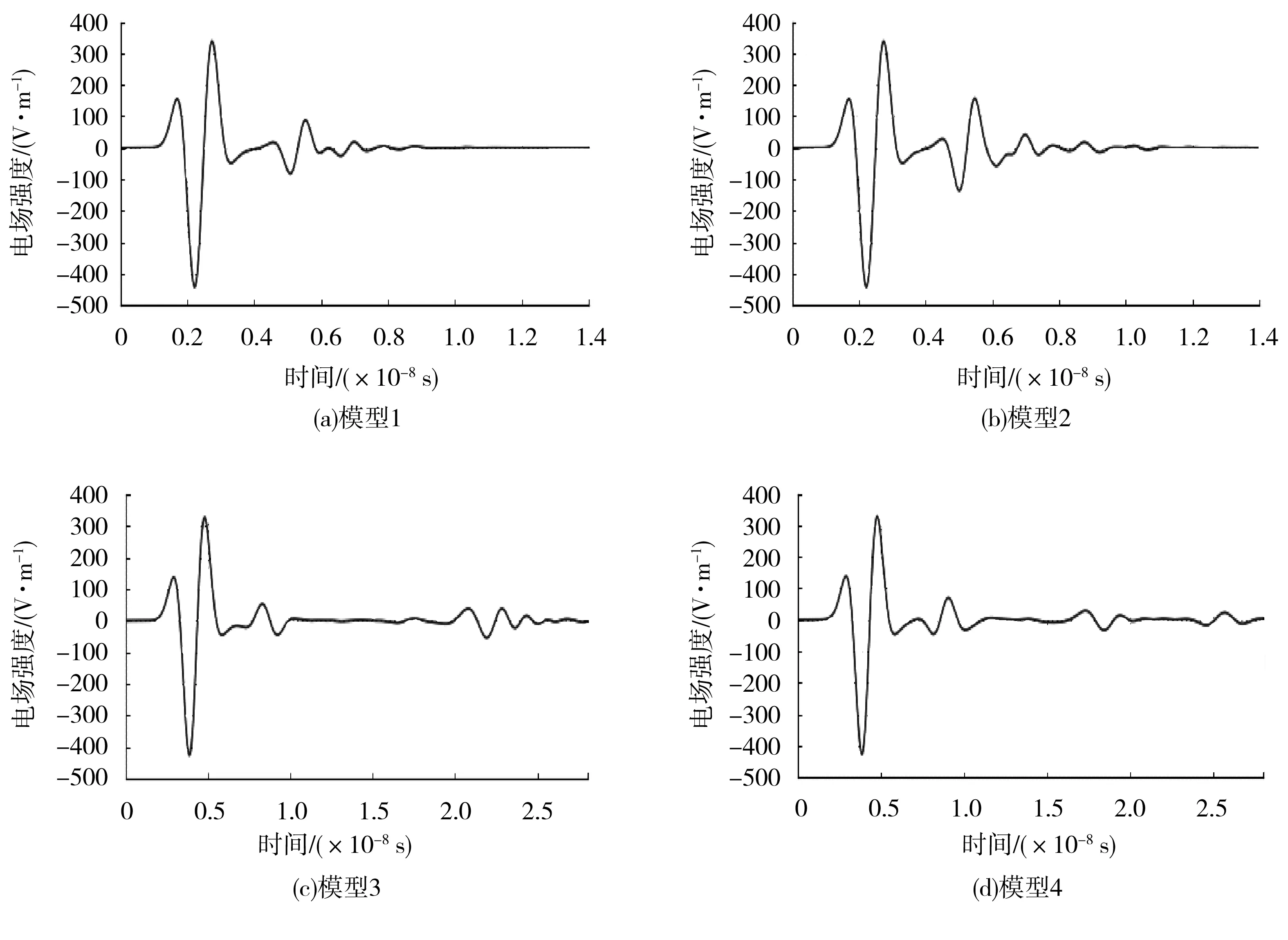
图4 空洞模型A扫描图像Fig. 4 A-Scan of the GPR image model
3.4 正演模拟分析
1) 从图4中可以看出,不同形状的2个空洞(模型1和模型2)的A扫描图像均为一条不反向 的双曲线。这是由于电磁波从混凝土传播到空气时的反射系数为正,电磁波在遇到充满空气空洞时没有发生反向。但由于2个空洞的形状不同,反射波的振幅有所不同,方形空洞的振幅较大。

图5 空洞模型B扫描图像Fig. 5 B-Scan of the GPR image model
2) 从图5中可以看出,它们的图像均呈现出开口向下的抛物线,且出现的时间相同,开口大小、曲率都较相近。由于方形空洞的顶部有2个直角,电磁波会在直角处发生绕射现象,因此,图5(b)中的抛物线的上层反射波较为明显,顶端颜色有较明显的加深,并且呈现出曲线交叠的情形,且空洞内部有杂乱无章的多次反射波,而图5(a)曲线平整、圆滑,并没有出现这一现象。
3) 空气的相对介电常数为1,混凝土的介电常数为6,水的介电常数为81,电磁波从介电系数大的介质传递到介电系数小的介质时,反射系数为正数,反射电磁波不会反向。相反,反射电磁波则会出现反向现象。对比2个充水型空洞,充满水的空洞的A扫描图像如图4(c)所示,它的反射电磁波有一条正向双曲线和一条反向双曲线,而一半是水一半是空气的空洞如图4(d)所示有3条双曲线,且第一条和第三条双曲线电磁波不反向,第二条双曲线电磁波反向。
4) 图5(c)中出现了2条抛物线,这2条抛物线之间的间隔的时间约为12 ns,电磁波在水中的传播速度约为0.033 m/ns,由此推算空洞直径为0.198 m,与模型参数中的直径0.2 m比较接近,但图5(d)中出现了3条抛物线。
探地雷达在检测空洞目标时,根据B扫描图像的顶部是否发生交叠和变形来判断空洞的形状;在实际探测中,根据A扫描图像中是否存在反向电磁波来判断空洞中是否含水;通过B扫描图像中抛物线的条数来判断是否含水;根据2条抛物线出现的间隔时间,估算含水空洞的垂直距离。
4 空洞物理模型试验
为了对正演模拟的结果进行验证,本研究做了进一步的实验。实验用密实的细沙来模拟混凝土,用木材制作了一个内边长为20 cm的正方体空箱,将空箱埋入细沙中来模拟方形空洞,空箱顶部埋深为20 cm。如图6所示。

图6 空洞模型试样Fig. 6 The sample for the cavity model
4.1 实验仪器
本次实验使用的雷达系统为瑞典MALA公司生产的RAMAC系列中的X3M主机与中心频率为800 MHz天线搭配使用。X3M主机自重较轻,可单人操作,并且能直接与电脑相连,探测的图像可在电脑上直观反映。
在数据采集过程中,还需要用到Groundvision2数据采集软件。将X3M主机与电脑用网线连接起来,打开电源,再在Groundvision2中按下F5,探地雷达即可开始工作。
4.2 试验方案
本次试验采用点测法,以空洞中轴线为基准,左、右两侧每隔1 cm布置一道测线,每道测线长1 m,共50条测线;每条测线上每隔1 cm布置一个测点,共101个测点。时窗为14 ns,收发天线间距为0.14 m,采样点数为1 024个。
4.3 试验结果分析
未经滤波的空洞模型探地雷达实测图像如图7所示,滤波后的空洞模型探地雷达实测图像如图8所示。
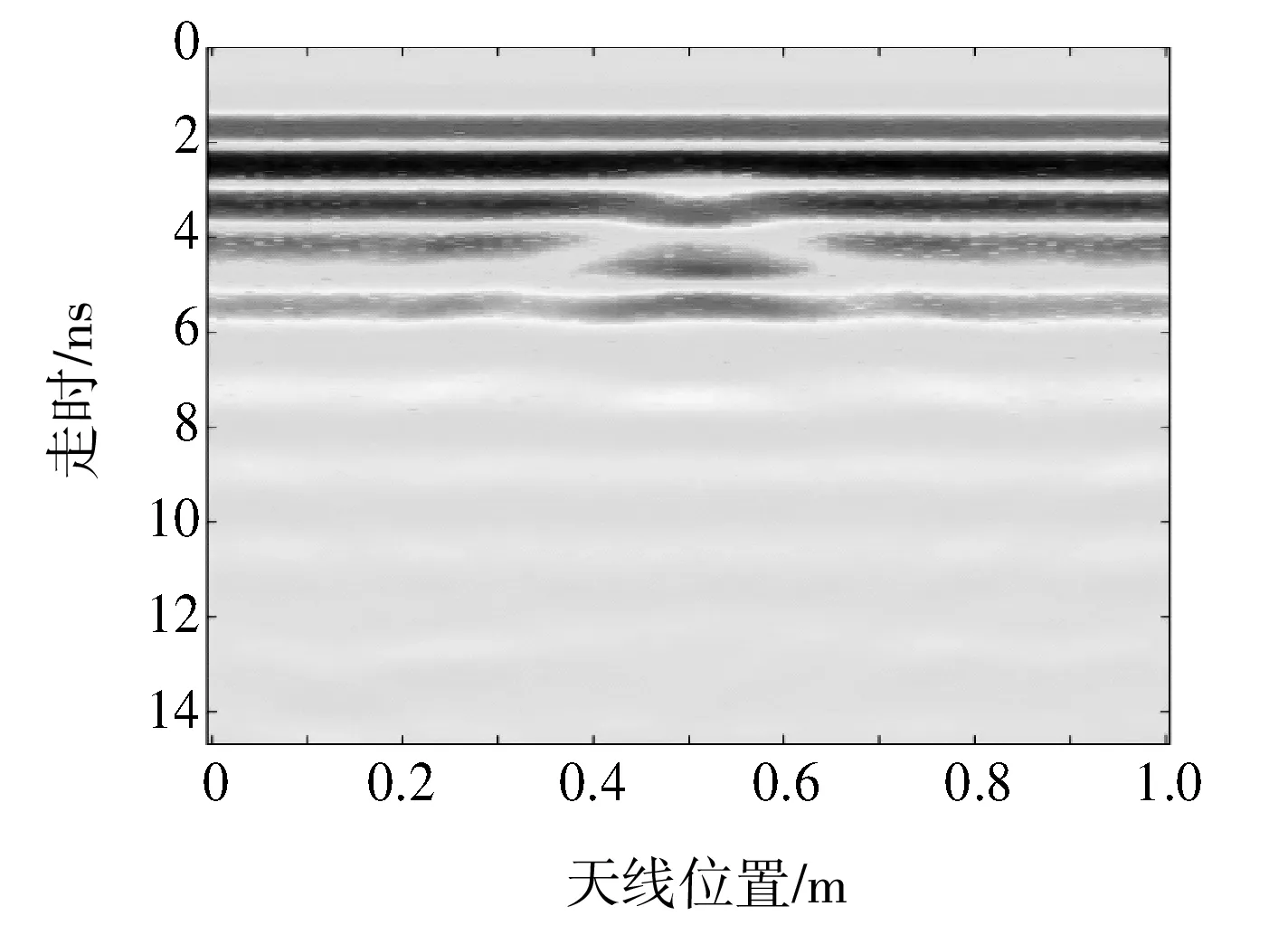
图7 未经滤波的空洞模型探地雷达实测图像Fig. 7 GPR image of the cavity model before filtering

图8 滤波后的空洞模型探地雷达实测图像Fig. 8 GPR image of the cavity model after filtering
从图7,8中可以看出,原始图像中的抛物线并不明显,而经过滤波处理后的图8中出现了较为明显的抛物线,可以看到在横向位置0.4~0.7 m之间有信号的异常响应,且抛物线顶端颜色有明显加深,与模型2的正演模拟结果相似度很高。表明:GprMax3.0能有效地模拟探地雷达的探测结果,但在实际探测过程中还需要通过一些必要的信号处理手段,更好地判断雷达剖面图所传递的信息。
5 结论
1) 本研究分别对不同形状的空洞、不同填充介质的空洞进行了正演模拟,得到了相应的探地雷达图谱,并对结果进行了分析。根据A扫描图像的相位、振幅来判断是否出现地质异常情况。根据B扫描图像中抛物线的数目来推断空洞中是否含水。
2) 为了验证正演模拟结果的准确性进行了物理模型试验,实测结果和正演模拟结果的剖面图较为一致,但仍需要通过滤波等信号处理手段来提高雷达剖面图的质量。
3) GprMax3.0用于探地雷达正演模拟是可行的,其模拟的图像简洁、直观,能充分反映地下介质的分布情况,为实际探测提供一些依据和经验。
4) 本研究只是列举了几个简单的示例,工程中的实际情况往往更为复杂。对于复杂地质条件的正演模拟,可以结合雷达信号偏移处理来提高正演模拟结果的精度。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01 06:27:42
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:02
科技研究·理论版(2021年20期)2021-04-20 01:42:52
雷达学报(2021年1期)2021-03-04 13:46:10
通信电源技术(2018年3期)2018-06-26 08:07:02
故事作文·高年级(2017年2期)2017-03-01 13:03:27
发明与创新(2016年26期)2016-08-22 03:23:26
新闻传播(2015年20期)2015-07-18 11:06:46
中医研究(2014年5期)2014-03-11 20:28:51
河南科技(2014年5期)2014-02-27 14:08:21
