
基于共生矩阵的红外图像检索匹配算法
2018-10-10 11:11朱琪赵飞潘丽杰徐本亮
数字技术与应用 2018年7期
关键词:图像处理
朱琪 赵飞 潘丽杰 徐本亮
摘要:图像检索匹配是在给定的图库中找出与查询图相匹配的图像或者无匹配图像。首先,对红外图像进行预处理后用Sobel算子与图像作卷积,得到图像边缘强度图;然后提取图像边缘强度图的灰度共生矩阵作为图像的特征;最后用改进的Manhattan距离方法计算图像特征向量间的距离,并根据一定阈值找出相匹配的图像或无匹配图像。本文用变电站红外图像进行的实验结果表明,本文算法能准确找出相匹配的图像,具有可行性。
关键词:图像处理;匹配算法;红外图像;灰度共生矩阵
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2018)07-0129-03
1 引言
基于图像内容的图像检索(content-based image retrieval, CBIR)技术在国内外已有很多研究与应用[1]。CBIR通过图像特征描述、特征提取以及相似性度量等过程实现图像检索,其中图像特征主要有颜色、纹理、形状等,相似性度量通过计算两幅图像特征向量之间的距离来完成,主要的距离度量有欧几里德距离、Manhattan距离、Minkowsky距离、Mahalanobis距离等[2-4]。图像匹配是将来自不同时间、不同传感器或者不同视角的同一场景的两幅或多幅图像,通过一定的变换使之在空间上一致[5]。CBIR检索目的是在图库中找出与查询图相似的图像,查找能够相互匹配的图像的研究少。另外,已有研究主要针对可见光图像[2,6-10],针对红外灰度图像的研究少。本文研究对红外灰度图像进行检索匹配,即在图库中找出与查询图能相匹配的图像。红外图像是目标场景热辐射分布的成像,其特点是红外图像只有灰度值,对比度较差,图像边缘较模糊等[11]。对此,本文通过用Sobel算子与图像作卷积,突出图像边缘信息,然后提取图像的灰度共生矩阵作为特征,最后用改进的Manhattan距离方法计算图像间的距离,通过设定距离阈值来判断图像是否匹配。本文实验结果表明本算法具有可行性。
2 特征提取与检索匹配算法
2.1 预处理
2.1.1 调整尺寸
为了提高运算效率,以及实现后面的匹配算法,兼顾考虑对图像纹理和边缘细节的要求,将图像尺寸统一缩小到128×128像素。
2.1.2 去除背景
用红外相机拍摄室外变电站图像时,容易受到云层温度影响,而云的温度与变电站设备的温度存在明显差异,故可通过去除图像背景方法减小云等环境因素的影响。这里采用最大类间方差[12,13]方法实现图像背景去除。
2.2 Sobel计算
利用横向和纵向Sobel算子与图像(A)作卷积[14]:
由于G的取值范围根据不同图像变化会很大,不利于后续灰度共生矩阵的计算,故将其归一化到图像灰度值区间[0~255]:
其中Gmax、Gmin分别是G的最大值和最小值。
2.3 灰度共生矩阵
灰度共生矩阵是指从灰度值为i的点(x,y)到距离(Dx,Dy)的另一点灰度值为j的出现频率[2,8],即:
其中,i,j=1,2,…,L是图像灰度值,灰度共生矩阵的大小为L×L;x,y=1,2,…,N是图像像素点坐标。实际应用中,(Dx,Dy)一般取4中情况:(1,0)(0,1)(1,-1)(-1,-1),分别对应0°(横向)、90°(纵向)、45°和135°方向的共生矩阵。
用纹理特征分析检索相似图像时,往往在灰度共生矩阵的基础上再提取纹理特征量,包括角二阶距、对比度、相关、反差分矩阵等。为了查找匹配图像,而不仅仅是相似图像,本文直接采用灰度共生矩阵作为图像特征向量。为了运行效率,需要控制灰度共生矩阵的大小,故将图像灰度调整为16等,得到大小为256的特征向量;同时为了增强算法对图像旋转的鲁棒性,对上述4个方向的灰度共生矩阵进行相加运算。
2.4 检索匹配算法
图像间的相似性度量通过计算两幅图像特征向量的距離来完成,主要的距离度量有欧几里德距离、Manhattan距离、Minkowsky距离、Mahalanobis距离等。其中Manhattan距离又叫街区距离,定义如下[3]:
2.4.1 加权距离
由灰度共生矩阵生成的特征向量P,其不同位置的数值差异很大,故在计算距离时不同位置对应不同的权重,权重取值如下:
sum(P)是特征向量P的总和。计算时以图库图像的特征向量为准,取其权重参与计算,则改进后的距离(加权距离)公式如下:
其中Pt是图库图像的特征向量,Pc是查询图像的特征向量,W是图库图像特征向量计算的权重系数,i是特征向量序数。
2.4.2 有效距离
本文计算灰度共生矩阵时(Dx,Dy)取4中情况:(0,1)(1,0)(1,1)(-1,1),即0°(横向)、90°(纵向)、45°和135°方向的共生矩阵。灰度共生矩阵的总和与图像像素尺寸大小(m×n)有关,如下:
本文图像通过尺寸调整后像素为128×128,所以sum(P)= 64770。
由于预处理时去除背景,所以实际参与灰度共生矩阵计算的有效像素有所减少,导致实际计算灰度共生矩阵总和也相应减小,则图库图像去除背景后的灰度共生矩阵有效占比率:
3 实验与结果
在变电站用红外相机对不同设备目标进行拍摄,获取清晰有效的48幅图像,其中选取30幅不同设备或不同角度拍摄的红外图像为图库图像,8幅为查询图像,查询图像中有4幅图像能在图库图像中找到匹配图像,另外4幅不能找到匹配图像,剩余10幅图像为测试图像。
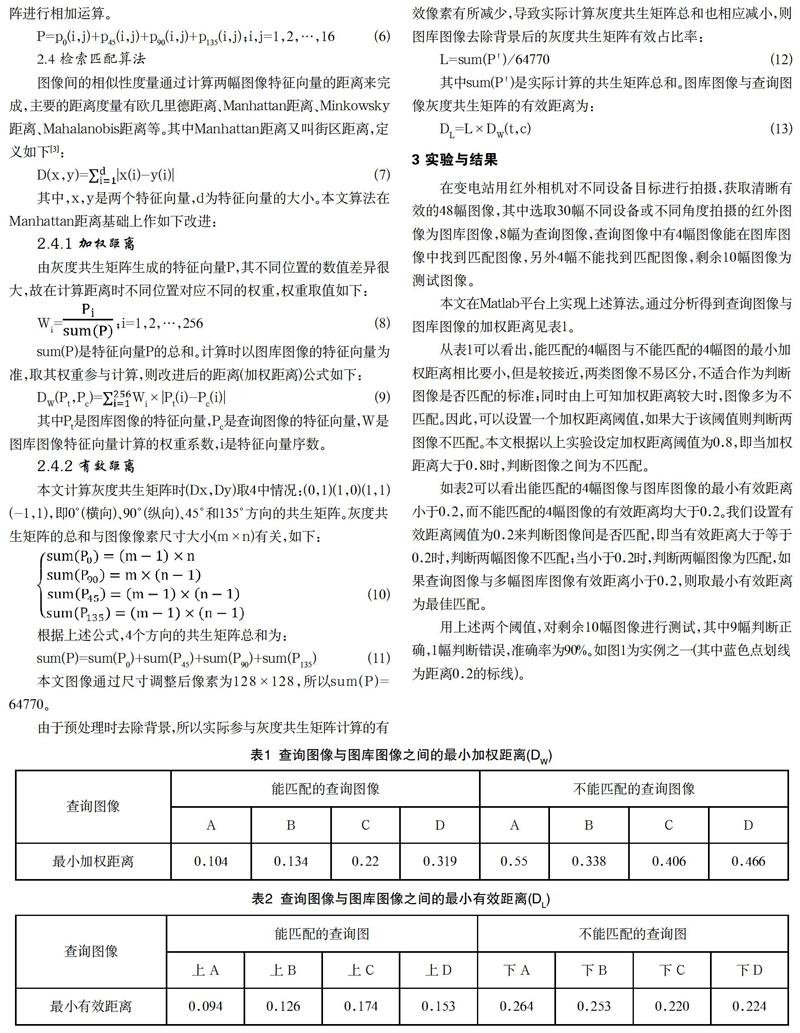
本文在Matlab平台上实现上述算法。通过分析得到查询图像与图库图像的加权距离见表1。
从表1可以看出,能匹配的4幅图与不能匹配的4幅图的最小加权距离相比要小,但是较接近,两类图像不易区分,不适合作为判断图像是否匹配的标准;同时由上可知加权距离较大时,图像多为不匹配。因此,可以设置一个加权距离阈值,如果大于该阈值则判断两图像不匹配。本文根据以上实验设定加权距离阈值为0.8,即当加权距离大于0.8时,判断图像之间为不匹配。
如表2可以看出能匹配的4幅图像与图库图像的最小有效距离小于0.2,而不能匹配的4幅图像的有效距离均大于0.2。我们设置有效距离阈值为0.2来判断图像间是否匹配,即当有效距离大于等于0.2时,判断两幅图像不匹配;当小于0.2时,判断两幅图像为匹配,如果查询图像与多幅图库图像有效距离小于0.2,则取最小有效距离为最佳匹配。
用上述两个阈值,对剩余10幅图像进行测试,其中9幅判断正确,1幅判断错误,准确率为90%。如图1为实例之一(其中蓝色点划线为距离0.2的标线)。
4 结语
通过实验测试可见本文所述算法具有可行性。因为实验所用的红外图像数量有限,而且仅为变电站的红外图像,其他目标的红外图像匹配准确性如何,阈值参数如何调整,需要进一步分析研究。
参考文献
[1]李向阳,庄越挺,潘云鹤.基于内容的图像检索技术与系统[J].计算机研究与发展,2001,(38):344-354.
[2]张建东,苏鸿根.基于内容的图像检索关键技术研究[J].计算机工程,2004,30(14):119-121.
[3]张李秋.一种基于纹理特征提取的图像检索方法[D].电子科技大学,2007.
[4]宋潇毅.基于纹理和颜色特征的图像检索[D].电子科技大学,2009.
[5]王红梅,张科,李言俊.图像匹配研究进展[J].计算机工程与应用,2004,(19):42-44.
[6]张恒博,欧宗瑛.一种基于色彩和灰度直方图的图像检索方法[J].计算机工程,2004,30(10):20-22.
[7]田小忱,杨东,杜春华.综合颜色和Contourlet直方图的图像检索方法[J].计算机工程,2010,36(1):224-226.
[8]黄学军,杨恒新,王伟.利用图像纹理特征的图像检索[J].红外与激光工程,2002,31(6):495-498.
[9]安志勇,杜志強,赵珊,等.基于颜色和空间特征的图像检索[J].红外技术,2007,29(6):361-364.
[10]毋小省,孙君顶.改进的基于直方图和空间特征的图像检索[J].红外技术,2007,29(11):666-669.
[11]周妮,张湧,吴滢跃.一种新的实时红外图像增强技术[J].红外技术,2010,32(6):324-327.
[12] Otsu N. A threshold selection method from gray-level histogram [J]. IEEE Trans Systems,1979,SMC-9:62-66.
[13]杜奇,向健勇,袁胜春.一种改进的最大类间方差法[J].红外技术,2003,25(5):33-36.
[14]袁春兰,熊宗龙,周雪花,等.基于Sobel算子的图像边缘检测研究[J].激光与紅外,2009,39(1):85-87.
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电子测试(2018年6期)2018-05-09
电子测试(2017年11期)2017-12-15
电气化铁道(2016年4期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中央民族大学学报(自然科学版)(2014年1期)2014-06-11
