
基于RST数字控制器的直流电机调速系统仿真设计
2018-10-10 11:11俞皖苏
数字技术与应用 2018年7期
俞皖苏
摘要:本文从直流电机调速方法出发,设计了数字化直流电机调速系统模型结构。以MATLAB为工具,根据数字控制器设计的要求,对被控对象即直流电机进行模型辨识。根据确定的模型为直流电动机设计RST控制器,建立Simulink模型来评估控制器的性能,并验证闭环系统是否满足建议的鲁棒裕度。实现了采用RST数字控制器对直流电机调速系统的仿真设计。
关键词:RST控制;直流电机;辨识;MATLAB仿真
中图分类号:TM571 文献标识码:A 文章编号:1007-9416(2018)07-0001-03
1 研究背景与意义
直流电机调速系统的数字控制实现是目前全球电力电子行业研究的一个重要方向。鉴于微处理器控制性能好,以及它在应用领域控制系统中的突破性发展,采用微处理器控制直流电机调速具有很高的实际意义和应用价值。采用微处理器进行控制,整个控制系统的结构更加简单,并且调速性能得到较大改善,因此是具有较高的性价比。
目前,我国的数字化直流调速控制在生产水平上尚且处于不成熟的阶段,并没有全数字化直流调速控制装置的生产产商,需要依靠引进国外設备,这大大增加了投资成本,影响经济效益。因此,对直流电机调速系统数字控制的研究在我国意义深远。
广泛用于直流电机的速度控制的方法之一是PID控制[1]。然而,直流电机具有参数不确定性,并且易有扰动影响,在使用传统的PID控制时,动态性能受到限制。针对电机对外部负载扰动和参数变化敏感的问题,研究人员开始在电机调速中采用RST控制器。M.Larbi[2]为了优化永磁同步电动机的速度控制,使用一种配置有矢量PWM(脉冲宽度调制)逆变器的RST实验方法,并提出了一种与负载观测器相关联的控制策略。实验结果证明,该系统可以更好地控制电机运行,同时保证了具有良好的鲁棒性和一定范围内的灵敏度。
2 直流电机调速系统与模型辨识
2.1 直流电机调速系统概述
直流电机转速的数字化控制系统框图如图1所示。
在该系统中,由直流电机控制器计算产生相应的控制信号u(t),并输入功率放大器,使其输出能够驱动直流电机以目标转速运行的电压。转速计用以测量直流电机的转动速度,并通过滤波器平滑测量数据,获得系统的输出转速y(t),同时作为直流电机控制器的反馈量,参与电机的调速控制。
2.2 系统模型辨识
为了获得直流电机的模型,本文采用系统辨识的方法[3],依据来自loan.D.landau的256组以PRBS伪随机序列控制信号叠加稳态控制信号作为系统的输入u(t),以及电机转速输出y(t)的公开数据,获得调速系统的模型。
本文中系统的辨识过程包括四个步骤:
(1)在设定的实验条件下采集输入、输出数据;(2)选择或估计模型结构和复杂度;(3)估计模型参数;(4)验证辨识模型。
图2展示了直流电机转速控制系统的结构框图,其中,功率放大器、直流电机、转速计、滤波器是辨识的对象。
在对直流电机进行离散化模型辨识时,首先,导入采集的输入输出数据。使用基于辅助变量(Instrumental Variables,IV)的复杂度估计算法,得到的实验结果。
实验结果表明,在系统最高阶次等于2时,其辅助代价函数取得最小值。同理,可由辅助代价函数极值确定系统各项阶次。可得:系统最高阶次N=2,系统时延d=0,多项式B(q-1)的阶次NB=2,多项式A(q-1)的阶次NA=1。
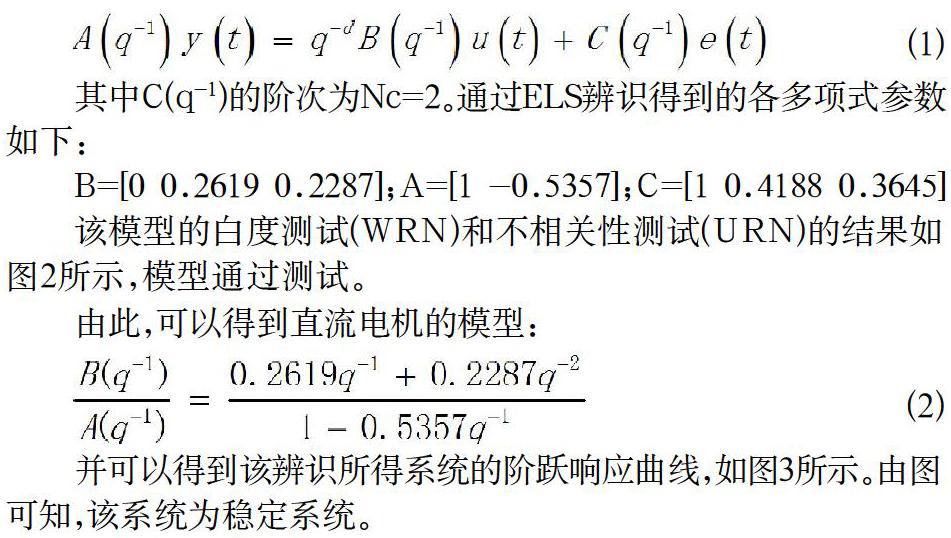
在确定了模型复杂度之后,选择合适的递归方法进行辨识。通过实验可知,增广最小二乘法[4](ELS)辨识得到的模型通过了模型验证,且与实际物理模型相符。这种情况下对应的对象及扰动的模型为:
该模型的白度测试(WRN)和不相关性测试(URN)的结果如图2所示,模型通过测试。
由此,可以得到直流电机的模型:
并可以得到该辨识所得系统的阶跃响应曲线,如图3所示。由图可知,该系统为稳定系统。
3 RST数字控制器
3.1 RST数字控制器结构
在电气工程应用中,RST数字控制器的应用越来越广泛[5]。它的一般形式如图4所示。
R(q-1)和S(q-1)是关于q-1的多项式,多项式的系数由不同的控制器的性能决定。而q-1为时延算子,也可等效理解为复变量z-1。
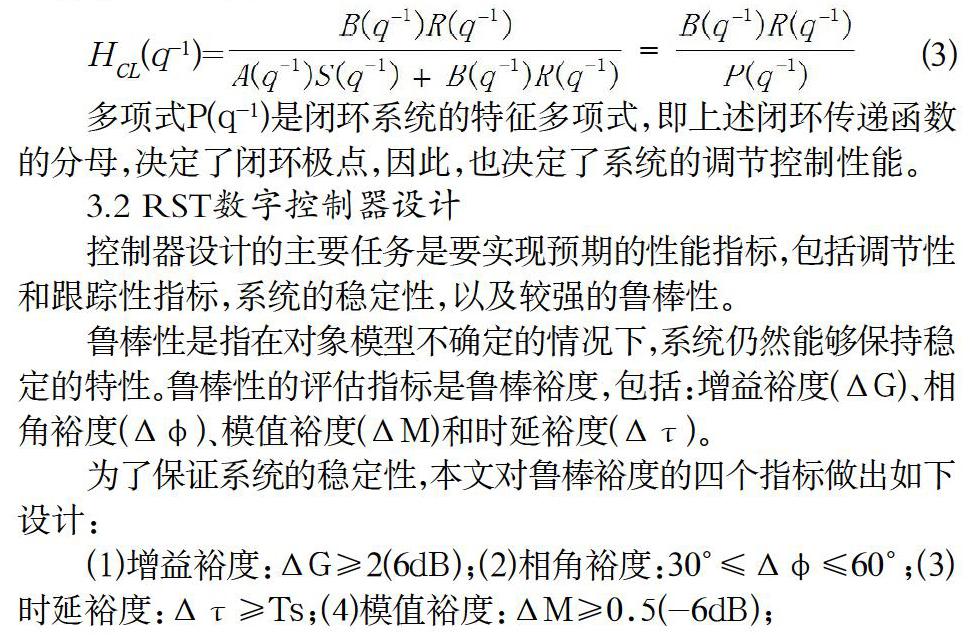
在图4展示的RST控制器结构中,参考输入r(t)到参考输出y(t)的闭环传递函数为:
多项式P(q-1)是闭环系统的特征多项式,即上述闭环传递函数的分母,决定了闭环极点,因此,也决定了系统的调节控制性能。
3.2 RST数字控制器设计
控制器设计的主要任务是要实现预期的性能指标,包括调节性和跟踪性指标,系统的稳定性,以及较强的鲁棒性。
鲁棒性是指在对象模型不确定的情况下,系统仍然能够保持稳定的特性。鲁棒性的评估指标是鲁棒裕度,包括:增益裕度(ΔG)、相角裕度(Δφ)、模值裕度(ΔM)和时延裕度(Δτ)。
为了保证系统的稳定性,本文对鲁棒裕度的四个指标做出如下设计:
(1)增益裕度:ΔG≥2(6dB);(2)相角裕度:30°≤Δφ≤60°;(3)时延裕度:Δτ≥Ts;(4)模值裕度:ΔM≥0.5(-6dB);
因此,在根据动态响应特性确定了控制器的参数后,应对系统的以上几项指标进行鲁棒性检验。
4 基于RST数字控制器的直流电机调速系统
4.1 直流电机调速系统数字控制器设计
利用辨识得到的直流电机模型,即式(2)作为被控对象。观察模型可以发现,该系统有一个接近[-1,j0]的稳定零点,选用极点配置的方法设计控制器。根据模型系统的阶跃响应(图3)可以得到,系统的上升时间约为4.5Ts,几乎没有超调。为了改善系统的动态响应性能,考虑减少上升时间,设置自然频率ω0=75rad/s,阻尼比ξ=0.9,并将系统离散化,得到的分母即对象系统脉冲传递函数的特征多项式P,多项式R(q-1)和S(q-1)也可以根据P进行求解。至此,已确定了控制器的调节控制特性。在设计跟踪控制时,可以选择同样的数值,即ω0=75rad/s,ξ=0.9。
设计结果如表1。
分别作系统和灵敏度的波特图,如图5和6所示,通过检验图中各个鲁棒裕度,确保设计的数字控制系统具有较好的鲁棒性。
由图5可以看出,系统的增益裕度为10.1dB,相角裕度为57.8deg,时延裕度为1.44Ts。在数字控制系统灵敏度曲线中,模值裕度和灵敏度函数的关系为,模值裕度是灵敏度函数Syp(z-1)极大值的倒数,而图6所作数字控制系统灵敏度曲线,曲线的峰值即为-ΔM,因此可得模值裕度为-4.08dB。
4.2 调速系统的仿真与性能分析
利用Simulink搭建控制系统的模型。仿真结果如图7所示,直流电机系统输出图中的两条曲线分别为输入的阶跃信号和电机离散系统输出的响应情况。由图可以观察得到系统的上升时间约为50ms,在T=1s时加入了扰动(扰动为幅值为-0.25的阶跃信号),抑制扰动的总时间约为40ms,系统的调节和跟踪性能良好。
5 结语
本文针对直流电机调速的问题,以MATLAB为仿真工具,设计了一个RST数字控制器。主要研究成果如下:
根据直流电机的电枢电压调速的基本原理,通过改变直流电机的电枢电压为控制方式,设计了直流电机数字化控制系统。
使用系统辨识的方法得到被控电机的模型。本文采用256组直流电机的输入输出数据作为实验的数据。通过复杂度分析确定了对象模型的阶数,再通过实验和验证,发现使用增广最小二乘法可以辨识出这组数据对应的直流電机模型。即得到了本研究中被控对象的传递函数,这是控制器设计的一个重要条件。
以极点配置为基本方法完成了RST控制器设计。RST控制律设计的依据是系统的期望性能指标,根据为系统预设上升时间和超调,得到控制系统的闭环传递函数。因此设计的系统具有很好的调节性和跟踪性。使用Simulink仿真,对系统进行鲁棒性检验,确认系统在受到扰动的情况下具有很好的鲁棒性能。
参考文献
[1]Y. T. Kim & S. H. Back.The Speed Regulation of a DC Motor Drive System with a PI, PID,and Command Matching Controllers[J].DonggukJournal,1990,(29):525-541.
[2]Larbi M, Hassaine S, Moreau S, et al.Speed control by RST with load observer of a Permanent Magnet Synchronous Motor[C]// Power Electronics and Motion Control Conference.IEEE,2010:10-25.
[3]Landau I D,Gianluca Z.Digital Control Systems[M].Holt, Rinehart and Winston,1980.
[4]王琳,马平.系统辨识方法综述[J].电力科学与工程,2001,(4):63-66.
[5]Longchamp R.Commande numérique de systèmes dynamiques[J].European Journal of the History of Economic Thought,1995,19(3):1-3.
[6]Khlaief A, Bendjedia M, Boussak M, et al. A Nonlinear Observer for High-Performance Sensorless Speed Control of IPMSM Drive[J].IEEE Transactions on Power Electronics, 2012,27(6):3028-3040.
[7]Bendjedia M, Ait-Amirat Y, Walther B, et al. Position Control of a Sensorless Stepper Motor[J]. IEEE Transactions on Power Electronics,2012,27(2):578-587.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2017年1期)2017-05-17
科学与财富(2016年26期)2016-12-01
考试周刊(2016年11期)2016-03-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年10期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
河南科技(2014年14期)2014-02-27
