背包式移动三维激光扫描系统的应用
2018-10-09 03:05杨铭
测绘通报 2018年9期
杨 铭
(上海市测绘院,上海 200129)
经过多年发展,基于GNSS的移动扫描测量系统已经相对成熟,其将卫星导航定位、惯性导航、激光扫描、近景摄像等多种技术手段融为一体,可在快速移动过程中实时获取周边地物的点云及影像信息。然而,此类系统虽然速度快、精度高,但其对GNSS信号有着较强的依赖,且价格不菲、生产成本高,应用领域受到诸多限制。
近年来,随着同步定位与制图(SLAM)技术,以及点云配准(ICP)算法的发展,背包式移动三维激光扫描系统应运而生。其可在没有GNSS和复杂惯导设备的条件下,快速、便捷、低成本地采集目标物体的三维点云数据。且不同于传统的车载移动扫描系统,此类设备由人员背载,在数据采集过程中可以根据需要随时上下移动,人员能经过的地方都能进行数据获取,对工作环境要求低,适应性强,可广泛应用于历史风貌保护、地下空间测绘、竣工测量、地籍测量等多个测绘领域。
背包式移动三维激光扫描系统作为一类新兴的测绘设备,其在国内外的应用还处于起步阶段,相关的应用研究相对较少。对此,本文首先选取3款当前具有代表性的背包设备,研究其内在技术原理,然后通过数据采集试验验证此类设备的精度与效率,最后探讨今后的发展方向。
1 技术研究
目前,背包式移动三维激光扫描系统根据定位原理的不同可分为3种类型:单纯依靠SLAM、SLAM+GNSS、IMU+点云配准。这3种类型各有利弊,下面将结合具体设备对其中的关键技术进行分析研究。
1.1 单纯依靠SLAM
SLAM技术起源于机器人视觉领域,其可在没有GNSS和IMU的情况下,在杂乱无章的点云中寻找线索,求取其中隐含的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而动态反向解算设备所处的位置和当前的姿态;然后将所有的位置与姿态数据进行整合,通过闭合环检测和连续特征匹配等高精度算法,将点云自动拼接,并最终得到高精度点云成果。
目前,单纯依靠SLAM技术的背包式移动三维激光扫描系统相对较少,其中具有代表性的是欧思徕(北京)智能科技有限公司完全自主研发的3D SLAM激光影像背包测绘机器人。该系统由5部分组成:全景相机、激光扫描仪、控制器、电源及平板设备,如图1所示。
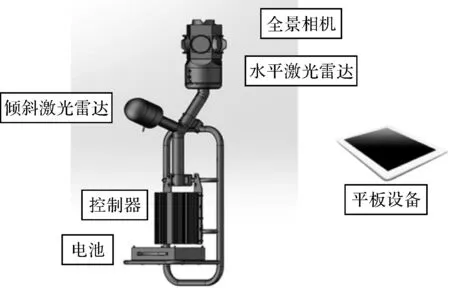
图1 3D SLAM激光影像背包测绘机器人
该设备的技术特点如下:
(1) 数据覆盖范围广:配有两个激光扫描仪,水平激光扫描仪用于定位,倾斜激光扫描仪用于数据获取,十分适合室内及狭窄地区的点云数据采集。
(2) 操作简单方便:一键启动,无需初始化,开机后便可进行数据采集。
(3) 应用领域多:既可室外采集也可室内采集,既可在平坦区域采集也可在高程变化区域采集(斜坡、楼梯等)。
(4) 彩色扫描:配有全景相机,可获得具有真彩色信息的点云数据。
(5) 智能化的后处理方法:数据处理全自动化,无需人工干预。
1.2 SLAM+GNSS
单纯依靠SLAM技术的背包式移动三维激光扫描系统虽然具有很多优点,但其定位精度取决于周边环境的特征形态。如果周边环境特征丰富且差异较大,SLAM算法的定位精度会很高;但是当周边环境特征较少或十分雷同时,定位精度会显著下降。这种情况一般发生在室外开阔区域,在此类环境下进行数据采集,往往只能采集到地面数据,而周边立面和天顶方向的数据十分稀少。此时,如果仍然单纯依靠SLAM技术进行定位,可能会导致计算无法收敛,从而无法获得合格的点云成果。
对此,可将SLAM与GNSS结合,在室内或狭窄道路等无GNSS信号的区域使用SLAM技术进行定位解算,而在室外开阔区域使用GNSS结合IMU惯导进行定位解算,从而进一步增强适用性,扩大应用领域。
Leica公司推出的Pegasus Backpack移动测量背包系统便是此种类型的设备。它是当前市场上集高性能、高精度、便携性于一体的高端移动测量背包系统,赢得了2016年红点设计大奖、2015年德国威克曼创新大奖。其配备5个相机和2个激光扫描仪,操作简单,佩戴舒适,使用灵活,适用于多种测绘领域(如图2所示)。

图2 Pegasus Backpack移动测量背包系统
通过搭载三频GNSS系统,采用最新的支持多光束的SLAM算法,以及高精度IMU,Pegasus Backpack可进行室内外一体化点云数据采集,精度达到厘米级。
1.3 IMU+点云配准
除了使用SLAM算法进行定位,目前还出现了一种基于IMU结合点云配准算法的定位方式,其中具有代表性的是意大利GEXCEL公司生产的HERON系列背包式三维激光扫描系统,如图3所示。

图3 HERON系列移动测量背包系统
该设备通过两个阶段进行点云数据自动拼接,首先是在较短的距离内(5 m)利用IMU进行位置解算,获得一段点云数据;然后在数据采集完成后,利用点云配准算法(ICP)对各分段点云数据进行整体平差,从而得到高精度的点云成果,如图4所示。
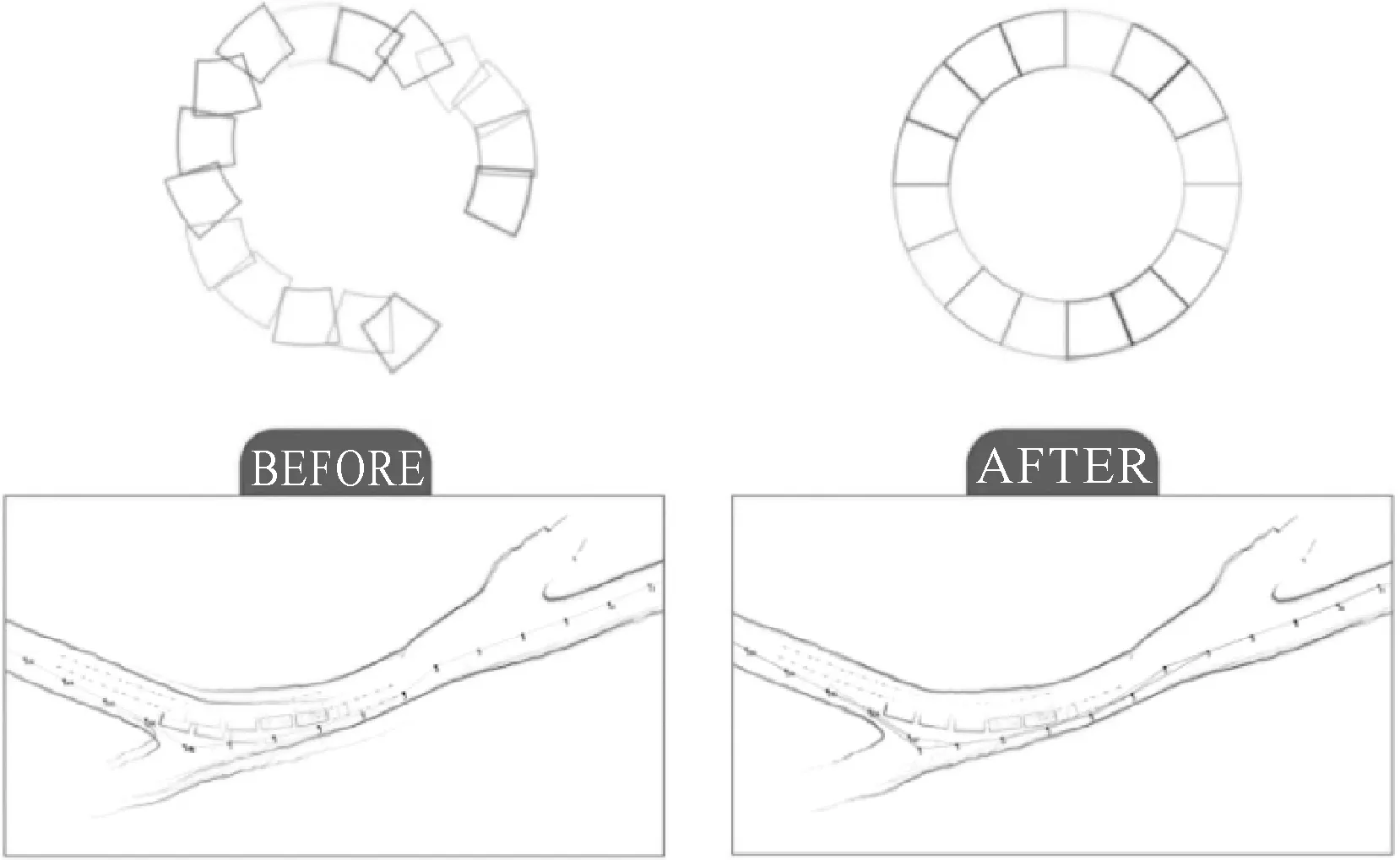
图4 分段解算+整体平差
相比于SLAM算法,IMU结合点云配准的定位方式具有以下两方面的优势:
(1) 数据处理效率更高:SLAM算法需要反向解算每个时刻的位置和姿态数据,计算量大;而上述方法将分段点云数据作为一个刚体参与整体平差,数据计算量显著下降。
(2) 整体精度更高:SLAM算法主要是通过闭合环检测和连续特征匹配来提高最终的点云成果精度,当闭合环过长或没有闭合时,误差积累会十分大,且无法得到很好的分配;而上述方法通过分段点云之间的公共部分,利用ICP算法进行全局整体配准,可以有效提升拼接精度。
然而,IMU结合点云配准的定位方式也存在一定的不足,其定位精度与SLAM算法类似,同样取决于周边环境的特征形态,当周边环境特征较少或十分雷同时,其最终的点云拼接质量会受到较大的影响。
2 精度验证与效率分析
为验证上述3类设备的精度与效率,本文进行了数据采集试验,地点为上海某一办公楼(室内外)。试验时首先使用背包式移动三维激光扫描系统进行数据采集,然后利用常规测量手段对点位精度、间距精度及高程精度进行检核,最后对数据采集与处理的效率进行综合分析。
2.1 试验方案
2.1.1 测试场景
(1) 室外部分:办公楼3个外立面,正门门口外推约100 m的路面。
(2) 室内部分:办公楼一层大厅及左右过道,二层过道及217办公室,三层过道及303办公室,左右两侧的楼梯(一层到三层)。
2.1.2 测试要求
(1) 室内外数据一次性全部采集。
(2) 室内外都布设有全局控制点,处理之后的点云数据必须转换到全局坐标系统中。
2.2 试验结果
2.2.1 数据采集情况
数据采集情况如图5所示。

图5 办公楼室外、室内点云数据采集成果
2.2.2 精度检核结果
精度检核结果汇总见表1。
由表1可得,3种类型的背包式移动三维激光扫描系统在平面点位精度和间距精度上均优于5 cm,基本处在同一量级。然而在高程精度上,3类设备虽然中误差都优于10 cm,但在高程最大较差上差异明显,其中SLAM+GNSS的设备高程最大较差为-9.6 cm,IMU+点云配准的设备为-14.4 cm,而单纯依靠SLAM的设备达到了27.3 cm。
高程检测点主要分布在室外道路部分,而高程较差较大的检测点都与办公楼有一定距离,且距离越远较差越大。造成该结果的原因主要为:单纯依靠SLAM和IMU+点云配准的定位方式需要依赖周边环境的特征形态,当处于较开阔的室外区域(如本试验中的道路部分),由于缺少足够的立面数据用于匹配,其高程定位精度会受到很大影响。此外,单纯依靠SLAM的定位方式主要通过闭合环检测来分配误差,在本试验中,道路部分有100余米,导致闭合环较长,从而进一步影响定位精度。

表1 精度检核结果汇总 cm
(1) 平面点位精度:3种类型设备的测量数据与检测数据(2″级全站仪)的对比情况如图6所示。
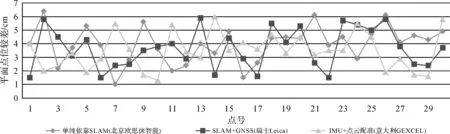
图6 平面点位精度统计
(2) 间距精度:3种类型设备的测量数据与检测数据(2″级全站仪+钢卷尺)的对比情况如图7所示。
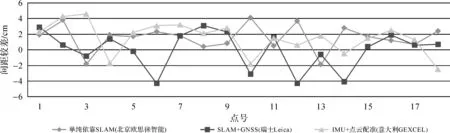
图7 间距精度统计
(3) 高程精度:3种类型设备的测量数据与检测数据(三角高程)的对比情况如图8所示。
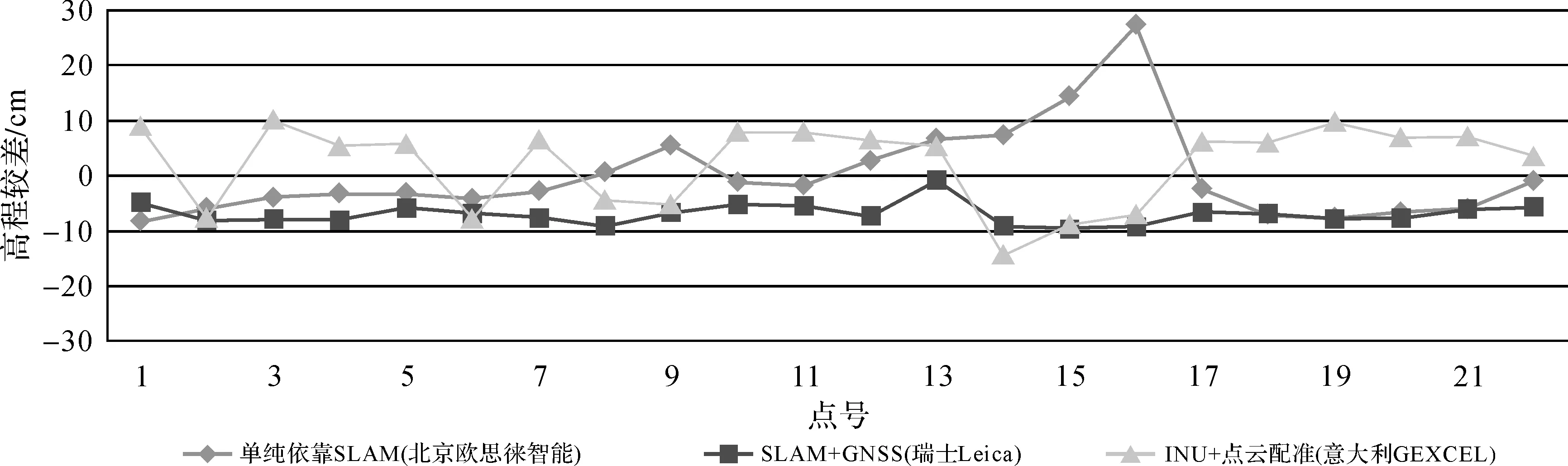
图8 高程精度统计
2.2.3 作业效率统计
作业效率统计见表2。

表2 作业效率统计
从表2可得,3款设备在作业效率上明显优于传统测量手段。其中,单纯依靠SLAM和IMU+点云配准的设备外业采集速度较快,其原因为这两类设备的初始化过程短,而SLAM+GNSS的设备由于数据采集前和结束后需要进行一段时间的初始化及收敛计算,其外业数据采集时间相对较长。
在内业方面,IMU+点云配准的设备使用分段数据整体平差策略,数据预处理时间最短;单纯依靠SLAM的设备需要解算高密度的轨迹数据,计算量较大,数据预处理效率相对较低;而SLAM+GNSS的设备在SLAM的基础上还引入的GNSS定位算法,计算量更大,外业与内业时间比达到了1∶4.5。
3 结 语
实践表明,背包式移动三维激光扫描系统在平面精度上能满足一般测绘项目(如大比例尺地形图测绘)的要求,但在高程精度上仍存在一定的差距。为进一步提高精度,可作两方面改进:一是修改算法,引入更多的限制条件,如控制点、固定长度等;二是进行多传感器、多算法的融合,将GNSS、IMU、SLAM、ICP等多种定位方式结合到一起,实现联合解算,满足室内外不同场景的应用需求。相比于传统测量设备,背包式移动三维激光扫描系统具有速度快、信息量大、实时性强、自动化程度高等优点。如果能在不降低现有作业效率的前提下进一步提升测量精度,背包式移动三维激光扫描系统在测绘领域必将取得更广阔的应用。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
昆明医科大学学报(2021年6期)2021-07-31
当代陕西(2020年23期)2021-01-07
科学(2020年5期)2020-11-26
农民文摘(2019年11期)2019-11-15
小哥白尼(趣味科学)(2019年2期)2019-04-17
消费导刊(2017年8期)2018-01-18
摄影之友(影像视觉)(2017年10期)2017-11-07
作文周刊·小学一年级版(2016年42期)2017-06-06
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24