无人机海岛礁航空摄影测量技术应用
2018-10-09 03:05张好运卢旭升翟京生
测绘通报 2018年9期
张 凯,张好运,卢旭升,游 画,薛 彬,翟京生
(1. 天津大学海洋科学与技术学院,天津 300072; 2. 中航通科技发展(天津)有限公司,天津 300350)
海岛礁地形的精确测量对船舶安全航行、海洋水产养殖、国家海洋主权维护等具有重要意义,在海洋测绘中占有重要地位。然而常规的海岛礁测绘采用全野外测图作业方式,存在登岛难度大、测绘成本高、测绘效率低等问题[1-2]。
无人机航空摄影测量具有自动化程度高、成本低廉、操作便捷等优点,是实现海岛礁精细化测量的重要潜力技术。近年来随着多旋翼无人机控制技术的不断成熟,无人机航空摄影测量技术得到迅猛发展[3-4]。目前,国内外很多学者已经开展了无人机航空摄影测量在城市建模、矿区监测、地质灾害测绘等方面的研究工作[5-8]。在无人机海岛礁航空摄影测量方面,国内部分研究所和部队等单位已经开展了相关理论研究和技术分析[9-10],但利用无人机实地开展海岛礁航空摄影测量的研究却鲜有报道。
本文通过把无人机航空摄影测量技术应用于海岛礁测量,制作海岛礁三维模型图、数字高程模型(digital elevation model,DEM)和正射影像图(digital orthophoto map,DOM)等测绘产品。并简要介绍无人机航空摄影测量的作业流程和关键技术,详细论述无人机海岛礁航空摄影测量的实际应用,同时对数据处理过程和结果进行分析和评价。
1 无人机航空摄影测量关键技术
1.1 无人机自动控制技术
无人机是开展海岛礁航空摄影测量的核心设备,通过搭载云台和摄像头,在高空可以获取不同位置点的高清地面影像图。为了实现地面影像图片的自动获取,减少人为误差和干扰,降低拍摄难度,关键在于开发无人机自动控制技术,包括无人机自动飞行技术和自动拍摄技术。通过地面站规划飞行任务,利用遥控器上传给无人机,使其可以按照航迹规划自动进行定点飞行,并能够在一定照片重叠度的要求下自动控制拍照速度,拍照间隔,实现无人机在航空摄影测量中影像获取的自动化。
1.2 三维重建技术
航空摄影测量中的数据处理所采用的是基于图像的三维重建技术。这一技术从计算机视觉研究发展而来,基于立体摄影测量原理,能够从多张具有一定重叠度的照片中提取相同特征点并进行追踪,从而获取相机的方位、姿态和待测目标的三维空间坐标,合成待测目标的三维模型,最后只需根据实际布设的少量控制点,通过相似变换便可将三维模型从图像空间坐标系转换为大地空间坐标系[11-12]。在无人机航空摄影测量过程中,所获取的每张照片均已记录了相机的拍摄位置和云台的姿态信息,在进行三维重建过程中可以利用这些信息进一步优化其合成精度,加快解析速度、提高三维模型质量。
2 无人机海岛礁航空摄影测量实地应用
现以山东省威海市某海岛礁航空摄影测量为例叙述如下。
2.1 测绘方案概述
本次进行无人机作业的海岛礁测量区域长约1000 m,宽约550 m,海拔最高点大约为68 m。根据无人机的相机视角和测量分辨率要求,设计无人机飞行高度约为200 m,飞行区域为矩形,相邻照片重合度大于50%,预计完成整个航拍任务需飞行5架次。整个航空摄影测量流程如图1所示。
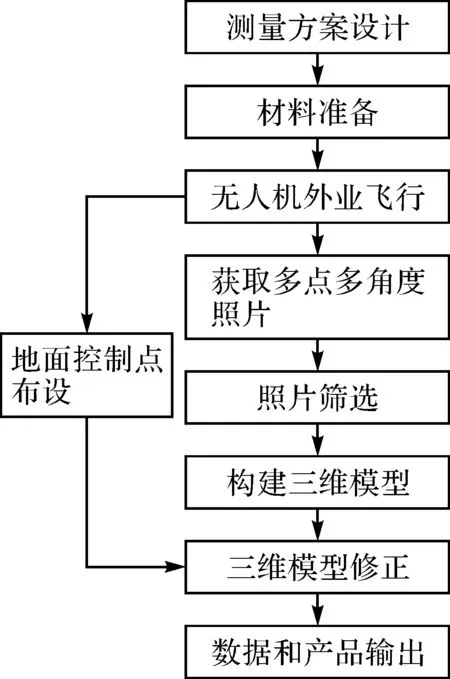
图1 无人机航空摄影测量作业流程
2.2 测绘材料准备
此次进行航空摄影测量作业的无人机有大疆公司生产的Phantom 4Pro小型四旋翼无人机,还有中航通生产的Owling六旋翼无人机。Phantom 4Pro无人机单次飞行时间大约为25 min,体积小巧便于携带,能抵抗5级大风,搭载云台摄像机像素为1600万。Owling无人机载重能力大,飞行稳定性更好,搭载1600万像素的Zenmuse X5云台,成像清晰度更高,飞行时间长达3 h,更适用于长时间的海上测绘作业。
此外,还专门设计了用于后期三维模型修正的地面影像控制点靶标板和用于进行三维建模质量评价的分辨率板,如图2和图3所示。
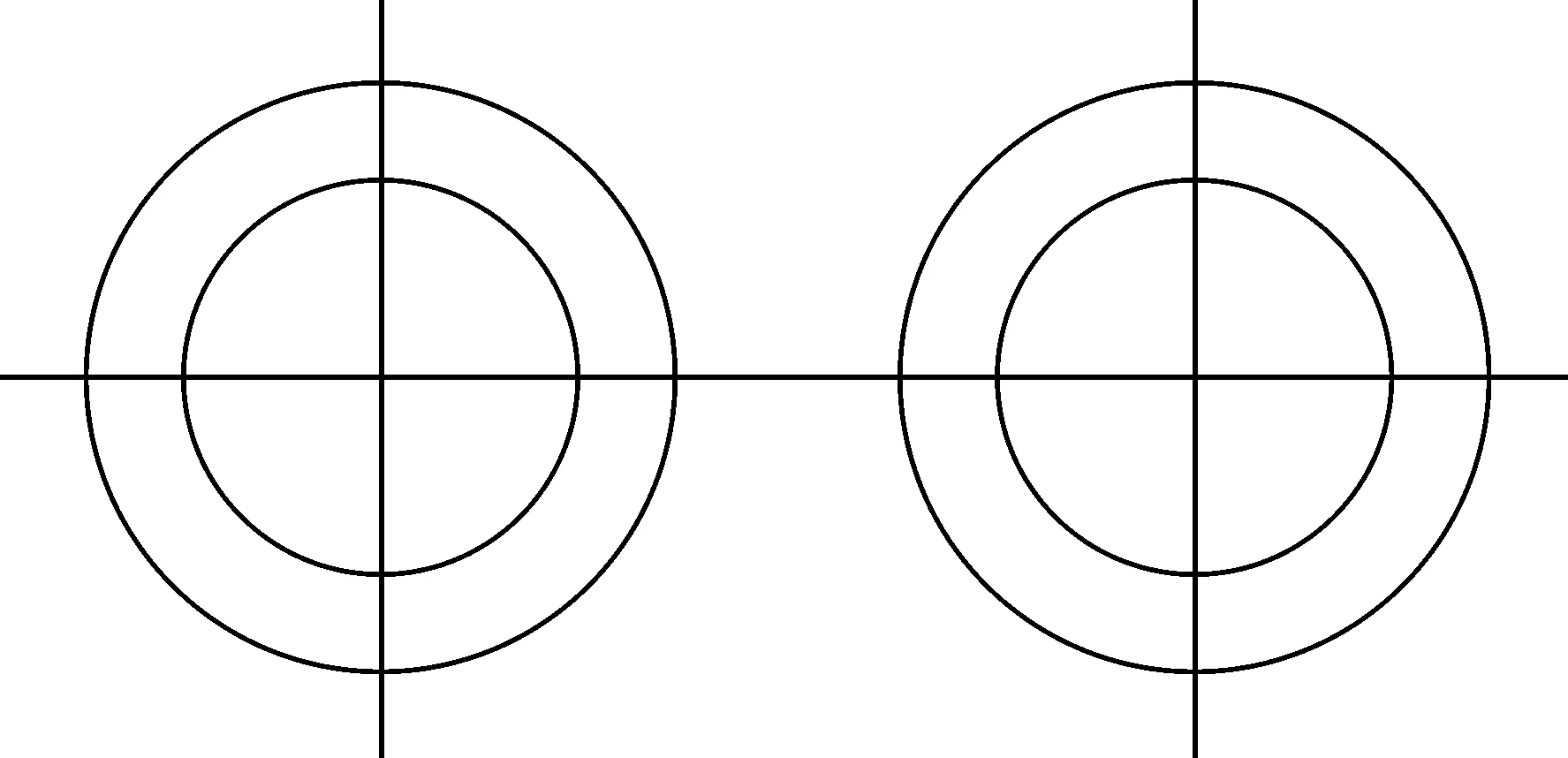
图2 地面控制点靶标图案(部分)
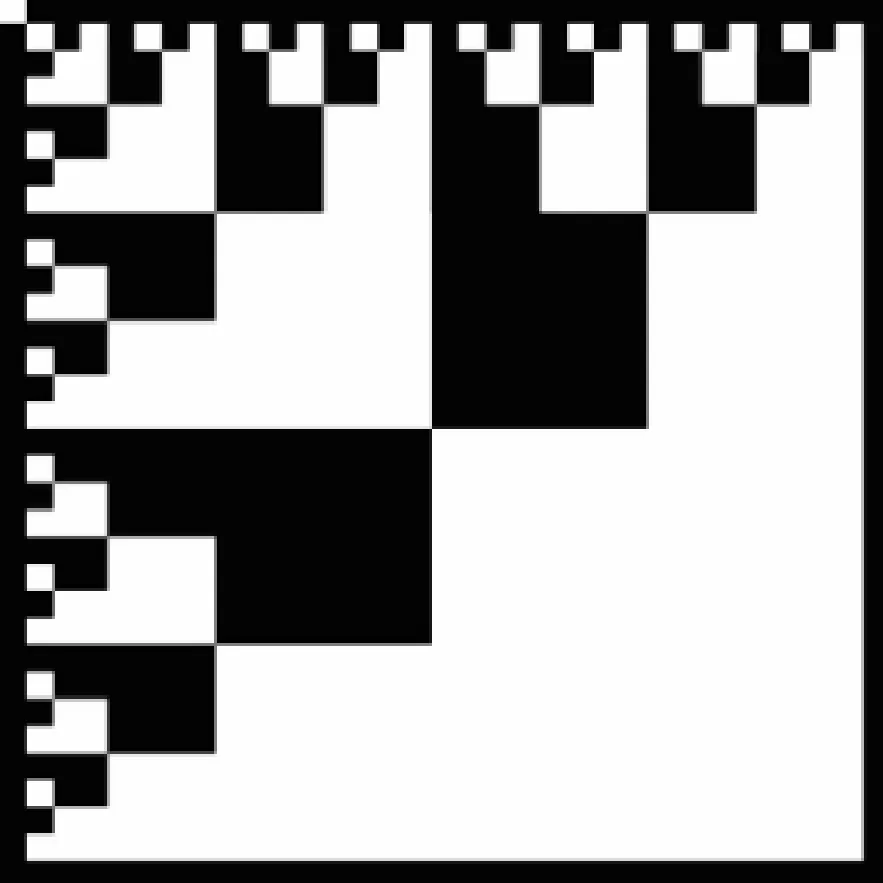
图3 航空摄影测量分辨率板
2.3 无人机海岛礁航空摄影现场测量
实地航空摄影测量中,根据现场地形考察情况,按照无人机飞行的轨迹不同,设计了两种飞行测量方案:
(1) 折线形飞行方案。如图4所示,无人机飞行高度为217 m,飞行轨迹为折线形,飞行过程中机头朝向不变,航向重叠率为60%,旁向重叠率为50%,飞行最大速度为6 m/s,最短拍照间隔为2 s。一次飞行任务分为5个航次,分别对应不同的相机角度。第一飞行航次,相机镜头竖直向下进行拍摄,余下4个航次,相机镜头竖直方向为与水平线倾斜45°角朝下,水平方向分别朝前后左右(相对于飞机机身)4个方位对海岛进行拍摄。
(2) 环绕型飞行方案。如图5所示,无人机飞行高度为152 m,以待测岛屿为中心,飞行轨迹为圆弧形,飞行过程中机头朝向始终指向岛屿中心,旁向重叠率为60%,飞行最大速度为6 m/s,最短拍照间隔为2 s。无人机飞行过程中相机镜头朝向竖直方向与水平线呈45°,水平方向直接朝向岛屿中心,按照一定拍照间隔拍照,形成岛屿环绕图像集。

图4 折线形飞行方案示意图

图5 环绕型飞行方案示意图
为了对后期制作的三维模型进行修正,此次测量作业共计布设了5个地面影像控制点,如图6所示,分别分散置于海岛礁的不同位置和不同高度,并记录地面控制点的GPS坐标和相对高度。

图6 地面影像控制点布设方位
2.4 三维模型构建与结果分析
利用Pix4D软件对无人机采集的照片进行处理,重建岛礁地区的三维立体模型[13],数据处理流程如图7所示。对生成的三维地形模型进行进一步的细致处理,去除杂散边缘、孔洞、不连续点等,根据照片的经纬度计算合成三维模型的大地空间坐标,并利用地面影像控制点对生成模型进行进一步的修正,生成的三维模型如图8所示,结合地形地貌制作的海岛礁数字正射影像图如图9所示,海岛礁高程图如图10所示。
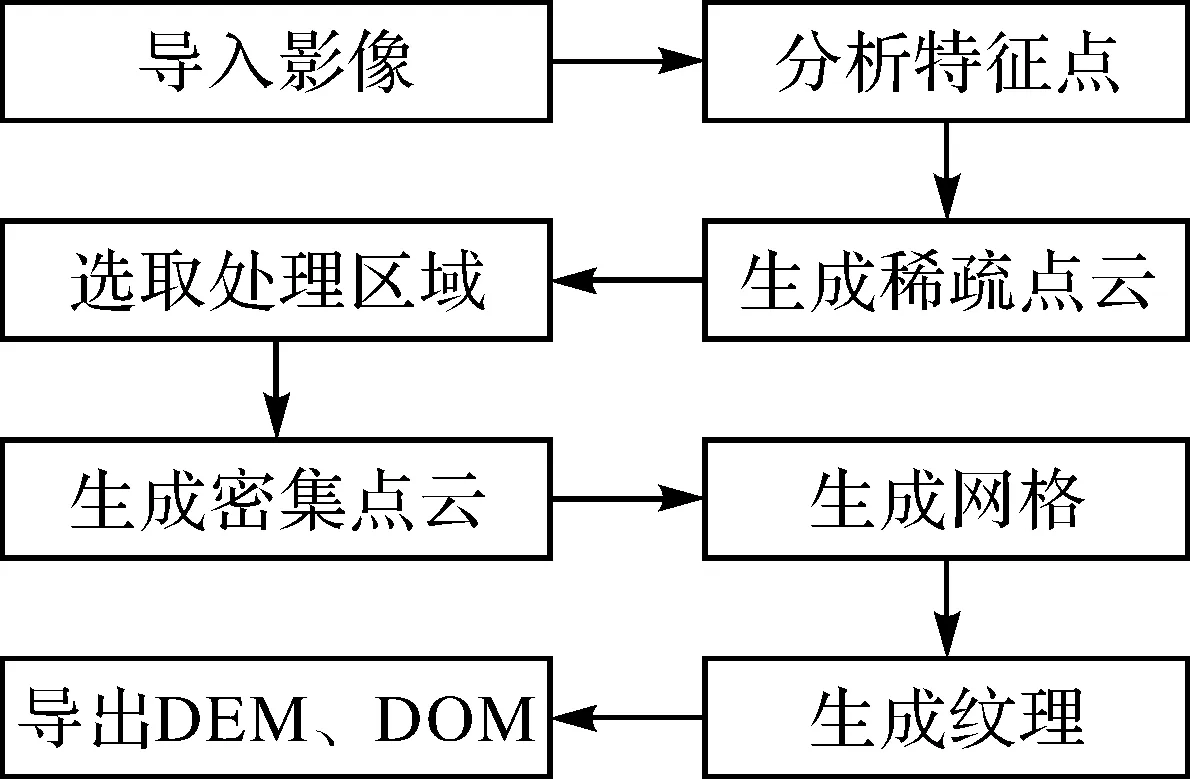
图7 重建三维模型数据处理流程
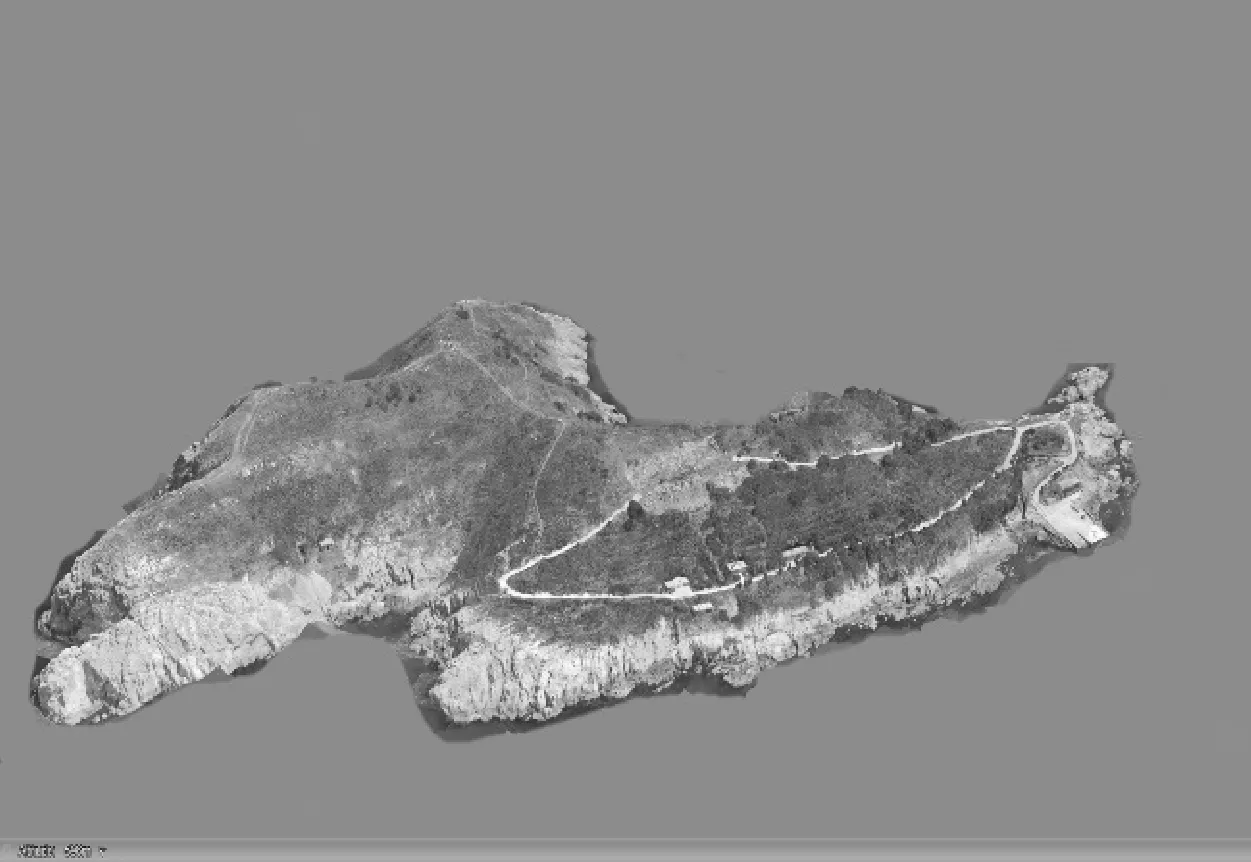
图8 海岛礁三维模型
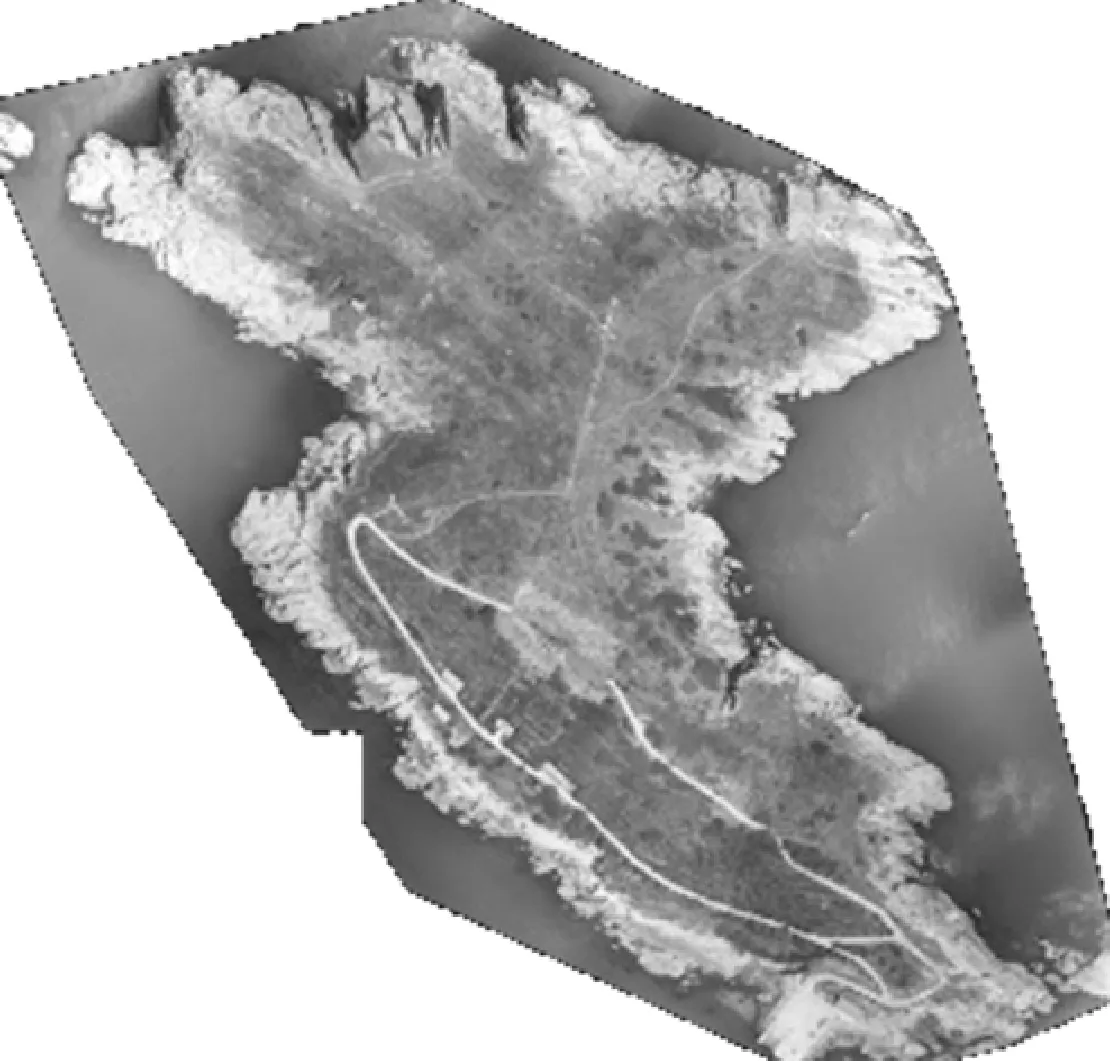
图9 海岛礁正射影像
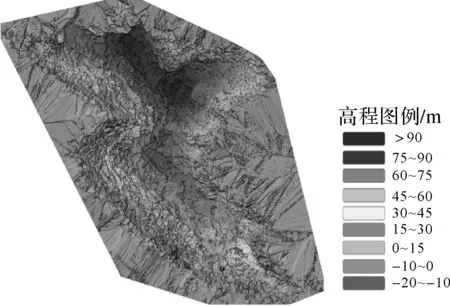
图10 海岛礁高程
本次航空摄影测量共获得902张区域影像图,通过Pix4D软件对照片进行分析处理,在选取处理区域时剔除大部分区域特征较弱的海洋水体,主要对海岛礁主体区域进行了三维建模。根据实际布放的地面测量控制点(靶标图像)对建立的三维模型进行进一步的修正。
分析处理得到的正射影像图中布放的分辨率板图案,计算出该三维模型的分辨率达到0.25 m的水平,可以满足海岛礁测量精度要求。同时分析海岛礁高程图可以发现,由于基于图像的三维重建技术要求相邻图像有明显的特征匹配点,而相邻海水图片的匹配特征点寻找难度大,造成海水部分的高程出现较大误差,但是海岛礁高于水面部分的高程分析是较为准确的。
随机选取海岛礁三维模型上的6个点,如图11所示,提取其经纬度信息,并与已有地图上相应位置点的经纬度进行比较,分析结果见表1。通过表1的误差数据可以得出航空摄影测量得到的三维模型数据相对应的地理坐标具有较高的精度,考虑普通民用GPS误差大约在10 m左右,所测量海岛礁的部分点误差还优于10 m,因此利用无人机航空摄影进行海岛礁地形测量具有非常大的潜在应用价值。
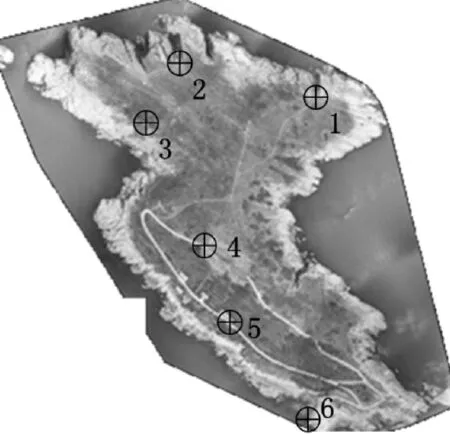
图11 随机选取位置点分布图
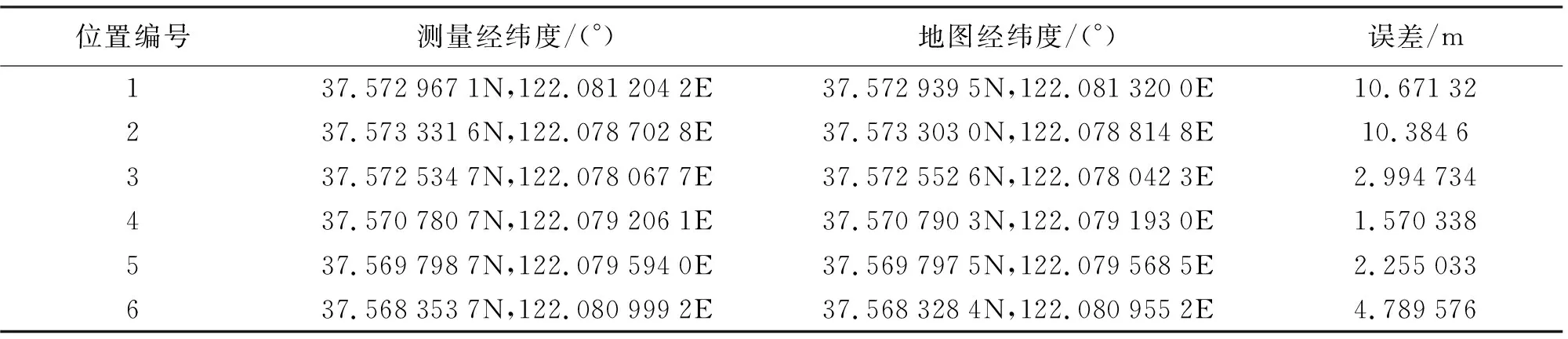
位置编号测量经纬度/(°)地图经纬度/(°)误差/m137.5729671N,122.0812042E37.5729395N,122.0813200E10.67132237.5733316N,122.0787028E37.5733030N,122.0788148E10.3846337.5725347N,122.0780677E37.5725526N,122.0780423E2.994734437.5707807N,122.0792061E37.5707903N,122.0791930E1.570338537.5697987N,122.0795940E37.5697975N,122.0795685E2.255033637.5683537N,122.0809992E37.5683284N,122.0809552E4.789576
3 结 语
从无人机海岛礁航空摄影测量过程和测量结果可以看出,无人机用于海岛礁测量不仅能够大大降低海岛礁测量的工作量,提高测量效率,合成的三维模型中岛礁部分也具有较高的精度,能够满足实际测量需求,是实现海岛礁精细化测量的重要技术手段。但同时也必须认识到,该方法的数据处理过程仍有待进一步优化,合成的三维模型中海洋水表面处理仍有较大误差,图像数据处理时间也较长,在处理摄像头畸变和空中三角测量算法方面还需开展深入研究,以便获得更准确、更高精度的海岛礁区域三维地形图。
猜你喜欢
资源信息与工程(2021年5期)2022-01-15
全球定位系统(2021年1期)2021-03-26
航天电子对抗(2019年4期)2019-06-02
航空知识(2019年1期)2019-01-11
军事运筹与系统工程(2018年1期)2018-11-10
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年4期)2017-11-23
安全(2015年6期)2016-01-19
中国非金属矿工业导刊(2015年5期)2015-12-22
海军航空大学学报(2015年1期)2015-11-11