机载电子产品伺服控制系统的开发应用
2018-09-22 04:15陈亮西南科技大学城市学院
数码世界 2018年8期
陈亮 西南科技大学城市学院
1.机载电子产品与伺服系统
1.1 机载电子
机载电子产品,就是飞机上的电子产品,在生产机载电子产品过程中对精度要求极高,即使很细微的误差都有可能成为飞机高速飞行中的灾难。在机载电子产品生产过程中,需要优化开发其伺服控制系统,以确保提高机载电子产品工作效率,提升机载电子产品质量。
1.2 伺服系统概念
对于实际应用中,伺服系统往往就是一种能够基于对象的机械参数(“位移、角度、力、转矩、速度、加速度”),而自动控制该对象的系统;也有人指出,伺服系统也是执行机构能够按照控制信号要求,而做出相关动作指令的系统,也即在控制信号到来之前,对于被控的对象往往是保持静止不动的状态,只有在系统接收到了伺服控制信号之后,此时的被控对象也会按指令要求做出动作。故此,在设计开发伺服系统中,要确保系统的输出量可自动、快速以及准确地反馈输入量变化。
2.开发需求分析
机载电子产品中,在其开发阶段,应该从硬件开发、软件开发、网络与总线开发过程以及专用集成电路开发过程、电源与机电控制系统开发等过程中,保障机载电子产品开发质量。机载电子产品的伺服控制系统开发中,应该确保伺服系统能够具备高精度需求,确保输出量能有效复现输入量的精确数据。并且,设计伺服控制系统中,确保系统可以在给定的输入条件以及外界干扰作用影响下,经过短暂的时间调节,就可确保伺服系统恢复初始平衡状态。还应该确保伺服控制系统可以快速响应机载电子产品信号,并跟踪信号,确保设计的伺服控制系统满足实际应用需求。
3.开发设计机载电子产品的伺服控制系统
3.1 总体结构设计
机载电子产品的伺服控制系统开发中,处理器采用TMS320F2810芯片,它作为整个伺服系统的控制核心部分,主要就是负责实现控制策略与控制算法的,同时可以与人机界面进行交互通信,实现对于机载电子产品伺服系统数据的处理;同时,也可对伺服系统运行安全进行保护,在机载电子生产中发挥引导功能,给出危险的报警显示。采用EPM7128集成芯片,有效的将系统外部的光电编码器信号,引用连接到系统的逻辑输入与输出端,有效的减轻伺服控制系统的电路设计工作难度,增强系统硬件设计过程中的的灵活性。对于本次伺服控制系统总体结构如下图1所示。

图1 系统的总体结构
3.2 系统功能设计
机载电子产品伺服控制系统设计中,主要就是能够控制在机载电子产品中的天线运动状态,实现对于其天线的控制与转换操作;并且,还可以根据机载伺服系统跟踪信息需求,对指定的机载电子产品目标开展实时的跟踪。故此,对于本次设计的伺服控制系统中,其功能如下图2所示:
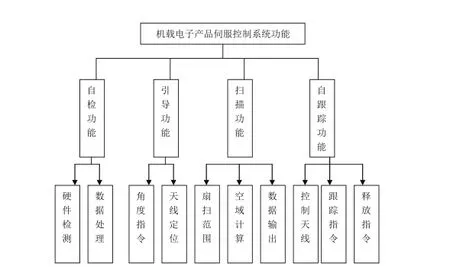
图2 伺服控制系统的功能结构
系统自检的功能:对于机载电子产品生产上电之后,首先系统就可以进行产品的上电自检,并能够在随后机载电子产品生产中,根据伺服控制程序DCSS指令,周期性的自检。
引导的功能:对于伺服控制系统,在接收到机载电子产品的引导角度指令之后,就可以驱动系统的天线定位到这个角度上,以达到系统设计需求,满足引导控制功能。
扫描功能:对于本次设计的伺服控制系统中,当接收了发送到机载电子产品扇扫的指令之后,就能够根据载机坐标系,伺服控制机载电子产品的天线,扇形进行角度以及速度的扫描。
跟踪的功能:开发应用伺服控制系统,可以在实际应用中跟踪记载电子产品状况,能够根据伺服控制系统中的跟踪指令,对机载电子产品的控制天线将会进入到跟踪状态,发挥跟踪作用。
3.3 系统代码实现
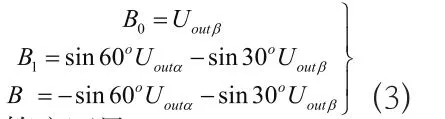
再用下式计算扇区号
为可以采用定点处理器进行浮点运算,对于伺服控制系统的软件设计中,须考虑系统参数因素,合理设置定表格示,见(4)式。


4.分析系统开发应用效益
基于本次开发的机载电子产品伺服控制系统,主要优点是良好的稳定性和可靠性,应用高速集成控制器,可以提高系统的响应速度和精度。通过可编程控制器件的控制,容易实现软件算法,方便调试维护和系统升级。系统具有友好的人机界面,较高的集成度,可以节省能源,发挥积极应用效益。
结论:综上所述,开发设计数字信号处理器与可编程逻辑器件相结合的伺服控制系统,能够提升机载电子产品伺服控制系统的工作稳定性,发挥积极应用价值,值得在实践中推广应用该开发方案。
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
中老年保健(2021年11期)2021-08-22
数码世界(2020年12期)2021-01-20
航天工业管理(2020年9期)2020-12-28
甘肃教育(2020年8期)2020-06-11
学校教育研究(2020年11期)2020-06-08
电子制作(2019年9期)2019-05-30
科技与创新(2019年2期)2019-02-14
电子制作(2018年14期)2018-08-21