火箭橇弹道测试技术研究
2018-09-20 02:10唐瑞姚然中
电子测试 2018年17期
唐瑞,姚然中
(航宇救生装备有限公司, 湖北襄阳 ,441003)
1 国内外同类技术发展现状分析
智能传感器(Intelligent Sensor)的概念最初是由美国宇航局在研发宇宙飞船过程中提出并形成的,1978年研发出产品,是由于宇宙飞船上需要用大量的传感器不断向地面发送温度、位置、速度和姿态等数据信息而产生的。智能传感器技术是一门正在蓬勃发展的现代传感器技术,是涉及微机械与微电子技术、计算机技术、信号处理技术、电路与系统、传感技术、神经网络技术及模糊控制理论等多种学科的综合性技术。
2 火箭橇弹道测试遇到的问题
(1)系统中任意位置的某一个传感器出现故障,其输出的杂波会干扰整个系统,造成整个系统瘫痪;必须精确定位故障传感器并更换新传感器,才能保证系统正常运行。(2)无法精确定位故障传感器位置。目前只能使用二分法,对整个进行排故检查。(3)终端接受到的任意一个传感器信号无法溯源。(4)远距离信号传输存在时间延迟和信号严重衰减。
3 拟采取的研究方法及实施途径
3.1 研究方法
目前使用的磁电测速系统其原理如下: 沿火箭橇副轨侧间隔一定距离安装双度霍尔开关传感器,在火箭橇橇体侧面安装一块永磁钢。当火箭橇运行时,永磁钢的磁场经过一个霍尔开关传感器,产生一个脉冲信号,利用数采器记录下火箭橇运行过程中经过各个霍尔开关传感器的时刻,并送至存储器进行存储。事后经过判读各个脉冲的间隔时间即可得到火箭橇运行在各个霍尔传感器之间的时间ΔT;测量相邻传感器之间的距离ΔS,即可计算出火箭橇经过相邻两传感器之间的平均速度:ΔS~ΔT,再加上时统系统便可获得火箭橇运行的时空位置。
测速系统沿滑轨铺设有540支传感器,其中老滑轨每间隔10米铺设一支传感器共310支,新扩建滑轨每间隔12.5米铺设一支传感器共230支。相邻两传感器通过电缆串接,其系统结构如图1示。
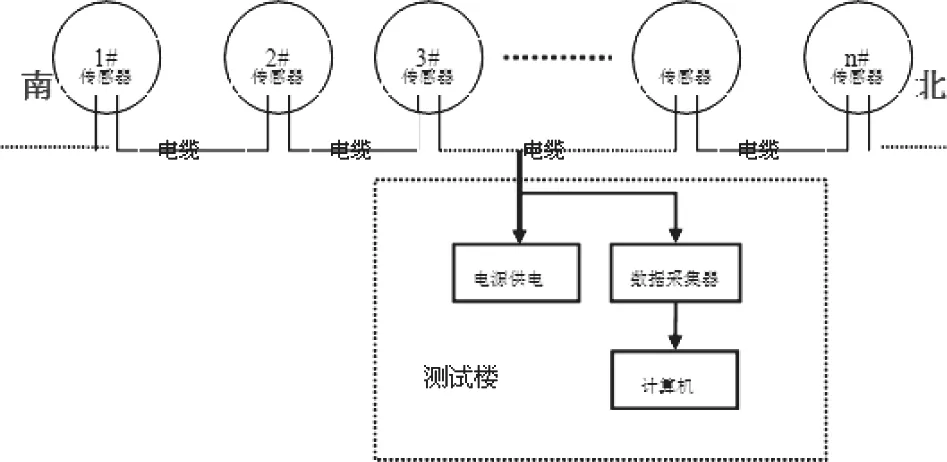
图1 现有磁电测速系统结构图
从图中可以看出,传感器的输出采用了逻辑“或”的拓扑结构,即任何一个传感器有输出均会拉低整条线路的输出。这种系统结构存在以下缺陷。
(1)线路中的任何一个传感器发生故障,其输出的杂波,会干扰整个系统的信号输出,造成系统瘫痪,系统可靠性极大的降低。
(2)“或”这种拓扑结构的存在会导致在查找故障的过程中极其困难,需要耗费大量的时间寻找故障传感器的位置。目前只能使用对线路二分法,破坏性的去寻找故障点。
(3)远距离供电及信号传输问题。6公里长的通信电缆的电阻在100欧姆左右,因此如果系统中引入的30v的直流电压供电的情况下,通信电缆在线路上的损耗将会非常之大,导致虽然传感器有输出,但是因为线路损耗的原因,导致整个系统中的部分传感器的信号直接衰减殆尽,数采器无法获取正确的输入,而且对于系统的电源容量也是一个巨大的考验。
3.2 人工智能技术下测速系统的系统结构
针对现有系统出现的问题,本系统将通过对传感器的输出信号进行数字化改造,减小其在传输线路上的信号衰减;通过在传感器输出端增加一个智能处理单元,完成传感器信号位置编码,从而实现输出信号溯源问题,解决故障传感器定位;通过光纤传输传感器的输出信号,降低系统损耗,同时将数采器的计时功能前移到处理单元。智能型磁电测速系统结构如图2所示。
3.3 智能芯片控制单元设计
改进后的系统,通过增加并联处理单元的方式采集现场600个传感器信号,每个处理单元收集20个传感器的触发信号,利用处理单元内部的高精度晶振计算触发时间间隔,同时保留在系统的内部,在整发试验完成后将数据通过光纤上传。本系统信号通过光纤进行传递,可以保证信号的完整性,同时在传送数据时可将传感器的位置信息与时间间隔信息同时编码进行上传,因此,如果系统中的传感器出现故障,可通过编码信息进行快速定位。系统的处理单元的结构示意图如图3所示。
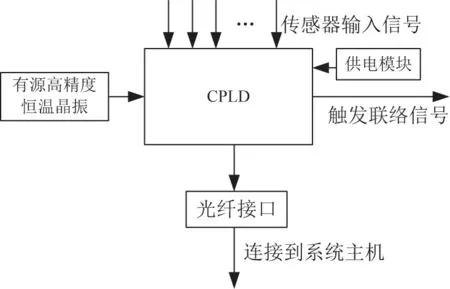
图3 处理单元结构示意图
3.4 智能控制单元对时间信号的处理
系统采用CPLD(复杂可编程逻辑器件)作为数据采集及处理的主要核心模块。CPLD内部采用固定长度的金属线进行各逻辑块的互连,所以设计的逻辑电路具有时间可预测性。由于系统中的所有CPLD使用相同的程序,因此系统中所有触发信号到光纤接口的延时均保持一致,在数据采集端这些延时在计算时差时会进行相减,消除了延时的误差。
系统使用有源高精度恒温晶振OCXO作为系统的时钟精度保证,振荡器频率稳定度至少保持在1×10-9,当OCXO运行的频率为40Mhz的时候,系统的频率误差保持在40M±0.04hz频率;同时CPLD采用的是硬件描述形式的编程,保证了系统的误差均在ns级别。
处理单元在工作过程中,CPLD的引脚监测传感器的输入情况,一旦输入信号发生变化,便开始计算此输入信号距离上个传感器输入信号的时钟个数,根据时钟个数即可判断出两次输入信号之间的时间差。同时CPLD监测输入信号的频率,如果此输入信号输入超过两次,则认为传感器出现故障,在最后通过光纤接口发送数据时直接发送错误码,便于现场工作人员查找传感器故障。
3.5 控制单元时间统一部分的设计
由于系统传感器采用了分组结构,因此需要通过触发联络信号将两个不同的处理单元进行联络。当一个处理单元的最后一个触发信号产生后,CPLD发送触发联络信号给下一处理单元,让两个处理单元保持同步。若因为某种原因触发联络信号没有发送至下一块处理单元,则后续的时间基准信号以下一处理单元的第一个时钟信号作为基准,因此可以得知,系统在传感器故障的情况下可以识别并封锁相应传感器在故障情况下的输出,同时,当处理单元出现故障时,系统仅仅部分传感器的信号丢失,其他传感器的信号的完整性没有被破坏,因此,极大的提升的系统的可靠性和鲁棒性,尽可能的将系统中的有用信息进行了处理。
4 结语
弹道测试系统是火箭橇试验的核心系统,弹道测试系统数据的准确性与完整性是检验试验是否成功的重要依据。为了实现和验证智能型测速系统的科学性,通过搭建一个2-3控制单元组成的控制系统,完成对传感器的电源控制、信号编码、故障定位;改进现有系统的缺陷,为今后增加传感器铺设密度,提高测速精度做好技术储备。
猜你喜欢
净水技术(2022年1期)2022-01-13
纺织科学研究(2021年1期)2021-12-03
科技资讯(2021年10期)2021-07-28
环境卫生工程(2021年3期)2021-07-21
广东通信技术(2020年7期)2020-08-13
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
小朋友·快乐手工(2016年5期)2016-05-14
小朋友·快乐手工(2015年10期)2015-11-02