
浅谈电机智能控制技术
2018-09-18 09:57杨红
数码设计 2018年2期
杨红
(卧龙电气集团辽宁荣信电气传动有限公司,辽宁鞍山,114000)
引言
随着科学技术的发展,研究对象和系统变得越来越复杂。基于数学模型描述和分析的传统控制理论难以解决一些复杂问题。智能控制主要针对控制对象及其环境,目标,任务,不确定性和复杂性提出。本文简要介绍了几种智能控制方法的原理,在广泛参考国内外无刷直流电机控制技术(BIDCM)的基础上,对常用的模糊控制,神经网络和遗传算法BIDCM控制方法,策略和具体应用进行了总结。
1 模糊控制
1.1 基本原理
模糊控制的思想是利用计算机实现人的控制体验。采用模糊数学方法,用模糊语言描述的一些模糊规则建立过程变量与控制方法之间的模糊关系。同时,根据当时的实际情况,基于模糊规则,采用模糊控制方法获取当时的控制量。模糊控制核心的部分是模糊控制器。模糊控制器主要由计算控制变量,模糊量化处理,模糊控制规则,模糊推理(模糊决策)和非模糊处理组成。
1.2 在无刷直流电机控制中的应用
传统的BIDCM控制系统采用PID系统,结构简单、可靠、稳定。然而,很难克服负载,模型参数和非线性因素等各种变化的影响,因而不能满足高性能和高精度应用的要求。
直接在BIDCM速度控制中使用模糊控制器,可以充分发挥模糊控制器适应非线性时变系统和滞后系统的优点,实现良好的控制效果和较强的鲁棒性,不需要建立控制目的。精确的数学模型,设计更加方便。传统的二维模糊控制器将误差和误差变化作为输入量。因此,该控制器具有模糊比例-微分效应,但缺乏模糊积分控制功能,系统稳定性差。PI控制不仅可以获得更高的稳态精度,而且具有更快的动态响应。因此将PI控制系统引入到模糊控制中来形成模糊PI复合控制,以提高模糊控制器的稳态性能。模糊PI控制如图1所示。

图1 模糊—PI控制器结构图
基于System Gneratore建立了BIIWM控制系统仿真模型,并进行了双闭环控制系统仿真测试;外环为速度控制,内环为电流控制,电流环为滞环电流调节器,速度环为模糊 PI智能控制器。模糊控制器的模糊推理系统采用Mandani型,去模糊采用加权平均法,并采用重叠对称分布的隶属函数设计控制规则表。仿真结果表明,该控制方法响应速度快、无超调、鲁棒性强、抗干扰能力强。
2 神经网络
2.1 基本原理
神经网络是许多简单连接的神经元的网络。它通过模拟人脑细胞的分布式工作特性和自组织功能,实现了并行处理,自学习和非线性映射。
一个简单的神经网络机制可以表示为如图2所示。小圆圈表示一个神经元。神经网络系统中可能有许多神经元。每个神经元的具体操作是接收来自其他相邻神经元的输入信息,然后生成输出并将其发送给其他神经元。神经元通常分为输入层神经元,隐藏层神经元(中间层神经元)和输出层神经元。输入层神经元接收来自外部环境的信息,输出层神经元将整个神经网络系统的效果作为外部环境。隐藏层神经元从网络接收输入信息并对其进行处理,然后输出信息。其他神经元。每个神经元通过相应的加权因子相互连接以形成网络拓扑。
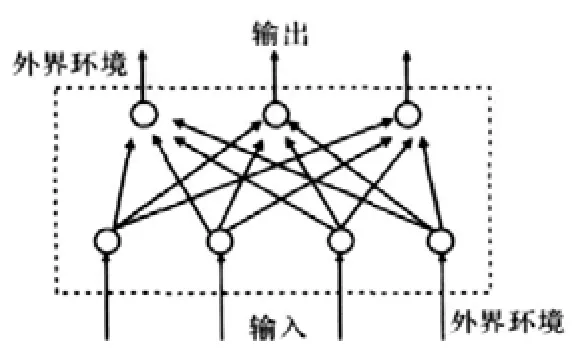
图2 简单的神经网络结构
2.2 在无刷直流电机控制中的应用
神经网络最普遍的训练方法是BP(backerror propagation)算法。该算法基于梯度发现技术,该技术使平均方差估计函数最小化。最小化过程是权重的调整。BP网络是前向神经网络的核心。它具有结构算法简单,易于在实时控制条件下实现的优点。因此,其在控制领域的应用已成为必然趋势。
模糊控制的收敛性较差,调整结束时很难消除系统的稳态偏差。在误差较小时,提出了三层BP神经网络来完成无刷直流电机的控制,并给出了三层神经网络的数字化描述。。实验表明,该方法训练的数据容易收敛,提高了系统的稳态精度,弥补了模糊控制的不足,并且不能及时降低系统的要求。由于基本样条函数使用多项式计算,与仅将神经网络指数函数用作隶属函数的模糊系统相比,它节省了时间。因此,基本样条函数模糊神经网络具有实现简单,速度快的特点。
3 遗传算法
3.1 基本原理
遗传算法是一个迭代过程,在每次迭代中保留一组候选解,根据解的优点和一些指标复制解中的一些解,然后使用一些遗传算子对其进行操作以生成新一代的候选解决方案。重复直到达到一定的收敛标准。
遗传算法的核心内容包括:(1)如何从现有的解决方案(父代)中选择一些后代来产生后代,并确保这些复制解决方案具有良好的特性以产生优秀的后代。(2)使用什么样的遗传算子计算选择的解,所使用的遗传算子必须具有良好的计算特性,以保持母解中的优良特征,同时丢失重要信息或良好的功能恢复。
3.2 在无刷直流电机控制中的应用
在自适应遗传因子构建的基础上,将自适应遗传算法应用于无刷直流电动机的优化。针对无刷直流电机的非线性组合优化问题,构造了一种新的自适应遗传因子。二维Shubert函数用于验证构建的遗传因子。同时,使用基本的遗传算法,自适应遗传算法和改进。对自适应遗传算法的三种算子进行了求解,证明了构造的自适应算子比其他两种算子具有更好的性能。
针对模糊控制器设计和参数在线调整的不足,采用遗传算法对模糊控制进行优化,生成最优模糊控制规则。最后,将模糊控制器应用于数字信号处理器(DSP)实现模糊控制器。参数的在线调整克服了传统模糊控制器在线调整的弱点,大大提高了控制器的性能。
4 结束语
本文介绍了通用无刷直流电机控制系统中的智能控制方法。其中,模糊控制是应用最广泛的。不同的控制方法适用于不同的场合,各有其优点和缺点。随着科学技术的不断发展和研究工作的深入,各种智能控制理论不断得到完善。可以预见的是,智能控制在无刷直流电机控制系统中的应用将越来越广泛。
[1]周德检, 吴斌.智能控制[M].重庆: 重庆大学出版社, 2005.
[2]陈娅冰, 周治平, 纪志成.无刷直流电机模糊 PI智能控制[J].江南大学学报(自然科学版), 2005, 4(1): 14-17.
[3]纪志成, 沈艳霞, 姜建国.一种新型无刷直流电机调速系统的模糊PI智能控制[J].电机与控制学报, 2003, 7(3): 248-254.
[4]戚鹏, 景占荣, 羊彦, 等.基于模糊 PID 控制的永磁无刷直流电动机调速系统研究[J].微电机, 2006, 39(7): 32-34.
[5]汪海燕, 李娟娟, 张敬华.自适应模糊 PID控制的无刷直流电机及仿真[J].微电机, 2003, 36(4): 15-17.
[6]王群京, 姜卫东, 倪有源, 等.无刷直流电机的自适应 Fuzzy-PI控制器的仿真[J].电气传动, 2004, (3): 19-22.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
云南大学学报(自然科学版)(2022年1期)2022-02-21
成都信息工程大学学报(2021年6期)2021-02-12
校园英语·上旬(2020年1期)2020-05-09
电子制作(2019年16期)2019-09-27
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
卷宗(2017年16期)2017-08-30
