盾构加泥系统的自动保压
2018-09-12 03:45陈柳锋
居业 2018年8期
关键词:变频器
陈柳锋
[摘要]在盾构施工过程中经常会发现加泥管路因为外部土仓泥浆倒流入而堵塞,根据实际情况提出加泥系统保压程序,利用PID算法,编写保压程序,并成功解决管路堵塞问题。此PID算法编写灵活,有一定的推广意义。
[关键词]加泥;PID;变频器
文章编号:2095 - 4085(2018) 08 - 0075 - 02
1 系统介绍
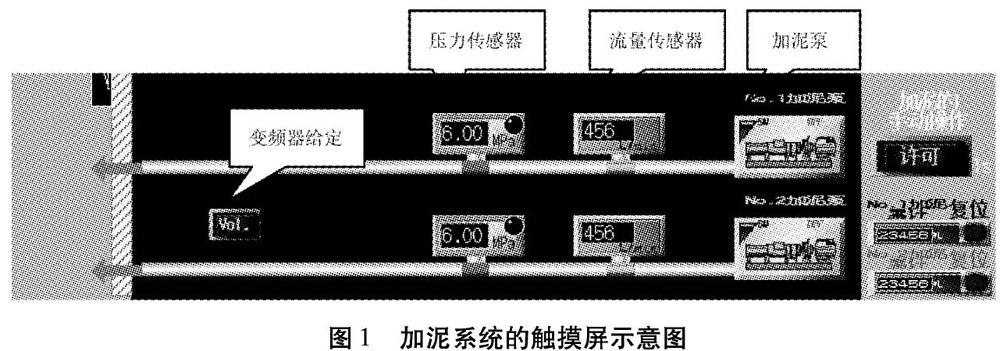
新加坡汤申线Tl225项目中使用的(Φ6660土压平衡盾构机,其加泥系统配有两台加泥泵,在施工过程中,用于向土仓添加膨润土。系统配有变频电机及变频器,用于改变加泥流量,加泥速度可以通过触摸屏手动给定,另外配有压力传感器和流量传感器,用于检测管路压力和加泥流量(见图1).
2 问题提出及解决方案
在加泥系统的管路出口处有止回阀用于防止土仓泥浆倒流人管路。但是由于某些原因,止回阀不能可靠的工作,把泥浆阻挡在管路之外。当长时间不进行加泥操作时,加泥出口处可能会由于外界压力高,泥浆经常会涌人加泥管路,造成管路堵塞。所以,施工人员为了解决这个问题,就频繁的启动加泥电机,且加泥流量给定不好估算,管路压力波动大,效率较低。
根据这个情况,在加泥系统上提出增加自动保压功能,即在盾构停止推进时,加泥系统自动运行,且维持一定的压力,保证了出口处泥浆不涌入管道。
加泥系统由变频电机提供动力,通过变频器调整电机转速来改变加泥的流量,在管路上设有压力传感器。根据加泥系统的系统构成,选用了PID算法。
3 PID原理简介及软件实现
即在设定的压力值下,通过加泥泵转速的自动调节,压力快速准确的达到给定值。设定的压力值可以看成一个阶跃信号。
下面简单介绍一下PID的原理。
3.1 PID控制方式的原理
(1)系统在阶跃给定下的稳态误差(扰动输入n(t)=O)
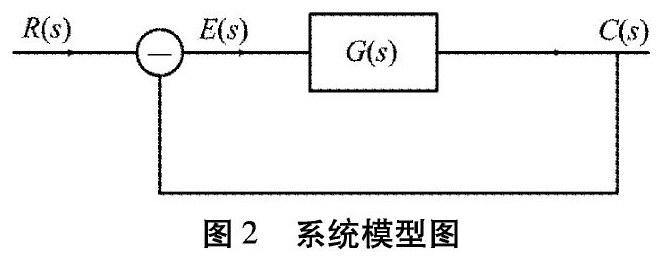
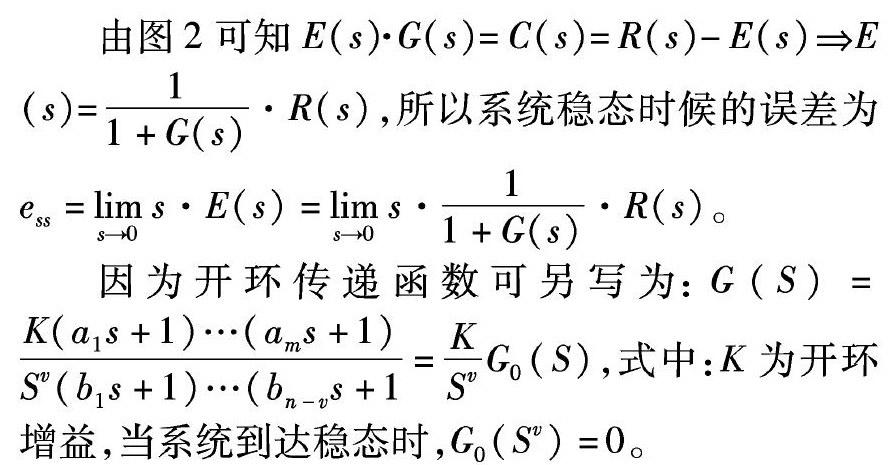
假设系统没有外部干扰,其中R(s)为压力设定值,C(s)为压力传感器测定值亦即系统的输出值,E(s)=R(s)一C(s)为设定值与给定值的误差。G(s)为加泥系统的传递函数,与加泥系统特性有关(见图2)。
开环函数中积分环节的个数称为系统类型。当v=0时,称系统为0型系统,当v=l时,称系统为1型系统,当v=2时,称系统为2型系统。
(2)扰动量作用下的稳态误差(给定输入r(t)=0),反应了系统在稳态过程中的抗干扰能力图3中n(t)是干扰信号,假设此时给定输入是r(t)=0。此时E(s)=R(s)一C(s),R(s)=0,故E(s)=一C(s)所以扰动量下的稳态误差的大小,跟扰动作用
5 结语
在调整PID参数后,输出的MV能是压力快速达到2. 5bar附近,并且稳态误差较小。在自动保压的作用下,很好的解决了管路堵塞问题。
本PID算法与三菱自带的PID指令相比较,算点位置,N(s),G1(s) G2 (s)有关。增加G1(S)的开环增益,可以减小稳态误差。同时,提高系统的系统类型,可以将稳态误差消除。综上所述,减小或消除稳态误差的方法如下。1.增加系统开环增益或增加扰动点前面前向通道增益,但增加开环增益会影响动态性能,甚至影响系统稳定性。2.在系统前向通道或扰动点前面的前向通道串联积分环节,但积分环节串联多了,会造成系统不稳定。方法1即使用P(比例调节)的方式,方法2即使用I(积分调节)的方式。
为了使输出值能更快更稳的达到设定值,使用D(微分调节)可以改善这一动态性能。總结为PI改善系统的稳态性能,D改善系统的动态性能。
以上即是加泥系统自动保压的理论依据。
4 PID基本算法的实现
首先在触摸屏上增加“自动保压”按钮(见图5)。然后用三菱QCPU来写PID算法,采样时间Ts为Is,PV为压力传感器测定值即输出值,SV为设定值即输入值,程序中设为机器数500,即2. Sbar,MV为PID为操作数即PID控制器的输出值,此数字还需要进一步做幅值处理后才能赋值给DA模块,改变变频器的频率输出即改变加泥电机的转速。
猜你喜欢
电子乐园·下旬刊(2021年3期)2021-02-08
科学与信息化(2020年14期)2020-09-16
中国电气工程学报(2019年4期)2019-09-10
城市建设理论研究(2014年37期)2014-12-25
管理观察(2009年20期)2009-10-14
中小企业管理与科技·上旬刊(2009年6期)2009-09-18